
移動通信システム
【課題】リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる。
【解決手段】本発明に係る移動通信システムでは、ハンドオーバ処理において、リレーノードRN4とリレーノードRN3との間の無線ベアラ及びリレーノードRN3無線基地局DeNB2との間の無線ベアラを介して、ハンドオーバ処理に係る制御信号を送受信するように構成されている。
【解決手段】本発明に係る移動通信システムでは、ハンドオーバ処理において、リレーノードRN4とリレーノードRN3との間の無線ベアラ及びリレーノードRN3無線基地局DeNB2との間の無線ベアラを介して、ハンドオーバ処理に係る制御信号を送受信するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動通信システムに関する。
【背景技術】
【0002】
図8に示すように、3GPPで規定されているLTE方式(Release.8)の移動通信システムでは、移動局UEの無線基地局eNB#1から無線基地局eNB#2へのハンドオーバ処理が行われる際に、無線基地局eNB#1と無線基地局eNB#2との間で設定されているX2ベアラを介して、無線基地局eNB#1と無線基地局eNB#2との間で、ハンドオーバ処理に係る制御信号が送受信されるように構成されている。
【0003】
図8に示すように、無線基地局eNB#1及び無線基地局#2は、X2ベアラを設定するためのX2ベアラ機能として、ネットワークレイヤ1(NW L1)機能と、ネットワークレイヤ2(NW L2)機能と、IP(Internet Protocol)レイヤ機能と、SCTP(Stream Control Transmission Protocol)レイヤ機能とを具備している。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】3GPP TS36.423、「Technical Specification Group Radio Access Network;Evolved Universal Terrestrial Radio Access Network(E-UTRAN);X2 application protocol(X2AP)
【発明の概要】
【発明が解決しようとする課題】
【0005】
LTE方式の後継の通信方式であるLTE-Advanced方式の移動通信システムでは、移動局UEと無線基地局eNBとの間に、無線基地局eNBと同様な機能を具備する「リレーノード(Relay Node)RN」を接続することができる。
【0006】
しかしながら、従来の移動通信システムでは、リレーノードRNが接続された場合、どのように移動局UEのハンドオーバ処理を行うべきか規定されていないという問題点があった。
【0007】
そこで、本発明は、上述の課題に鑑みてなされたものであり、リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる移動通信システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の特徴は、移動通信システムであって、第1リレーノードと第2リレーノードとが無線ベアラを介して接続されており、前記第2リレーノードと無線基地局とが無線ベアラを介して接続されており、移動局が、前記第1リレーノードとの間で無線ベアラを設定し該第1リレーノードと前記第2リレーノードと前記無線基地局とを介して通信を行っている第1状態と、前記無線基地局との間で無線ベアラを設定し該無線基地局を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されており、前記ハンドオーバ処理において、前記第1リレーノードと前記第2リレーノードとの間の無線ベアラ及び該第2リレーノードと該無線基地局との間の無線ベアラを介して、前記ハンドオーバ処理に係る制御信号を送受信するように構成されていることを要旨とする。
【0009】
本発明の第1の特徴において、前記第1リレーノードは、前記移動局から測定報告を受信した場合、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに対して、該測定報告を転送するように構成されており、前記第2リレーノードは、前記測定報告に基づいて、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に送信するように構成されていてもよい。
【0010】
本発明の第1の特徴において、前記第1リレーノードは、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに送信するように構成されており、前記第2リレーノードは、受信した前記ハンドオーバ要求信号を、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に転送するように構成されていてもよい。
【発明の効果】
【0011】
以上説明したように、本発明によれば、リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる移動通信システムを提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の第1の実施形態に係る移動通信システムの全体構成図である。
【図2】本発明の第1の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図3】本発明の第1の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図4】本発明の第2の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図5】本発明の第2の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図6】本発明の第3の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図7】本発明の第3の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図8】現状の移動通信システムにおけるプロトコルスタック図である。
【発明を実施するための形態】
【0013】
(本発明の第1の実施形態に係る移動通信システム)
図1乃至図3を参照して、本発明の第1の実施形態に係る移動通信システムについて説明する。
【0014】
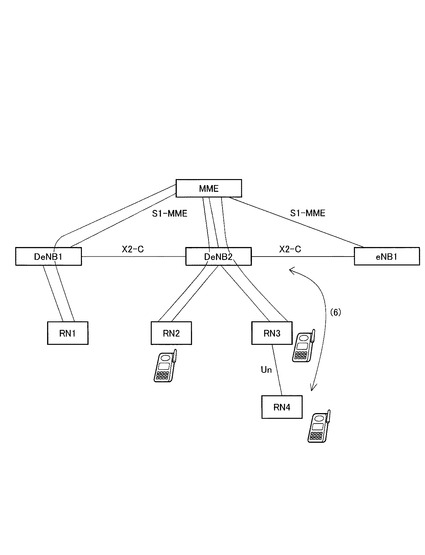
本発明に係る移動通信システムは、LTE-Advanced方式の移動通信システムであって、例えば、図1に示すように、交換局MMEと、リレーノードRN1乃至RN4と、リレーノードRN1が接続されている無線基地局DeNB(Donor eNB)1と、リレーノードRN2及びRN3が接続されている無線基地局DeNB2と、無線基地局eNB1とを具備している。
【0015】
ここで、無線基地局DeNB1と無線基地局DeNB2とが、X2-Cインターフェイスを介して接続されており、無線基地局DeNB2と無線基地局eNB1とが、X2-Cインターフェイスを介して接続されている。
【0016】
また、無線基地局DeNB1、無線基地局DeNB2及び無線基地局eNB1のそれぞれと、交換局MMEとが、S1-MMEインターフェイスを介して接続されている。
【0017】
かかる移動通信システムにおいて、移動局UEは、無線基地局eNB(DeNB)及びリレーノードRNとの間で無線ベアラを設定して、無線通信を行うように構成されている。
【0018】
また、かかる移動通信システムでは、図1の(6)に示すように、移動局UEが、リレーノードRN4(第1リレーノード)との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3(第2リレーノード)と無線基地局DeNB2(無線基地局)とを介して通信を行っている第1状態と、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されている。
【0019】
また、かかるハンドオーバ処理において、リレーノードRN4とリレーノードRN3との間の無線ベアラ(Unインターフェイス)及びリレーノードRN3と無線基地局DeNB2との間の無線ベアラ(Unインターフェイス)を介して、ハンドオーバ処理に係る制御信号(X2AP信号)を送受信するように構成されている。
【0020】
なお、本実施形態では、リレーノードRN2と無線基地局DeNB2との間には、無線ベアラ(Unインターフェイス)が設定されないように構成されている。
【0021】
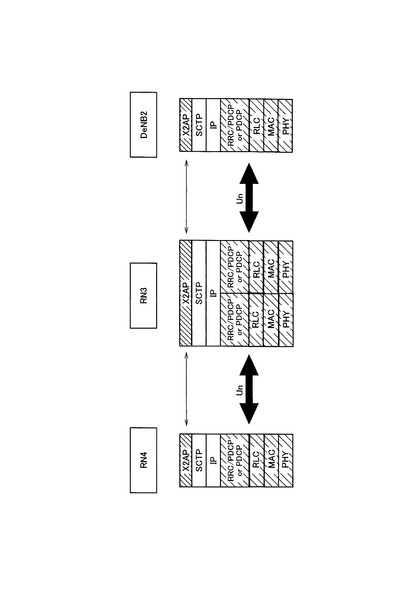
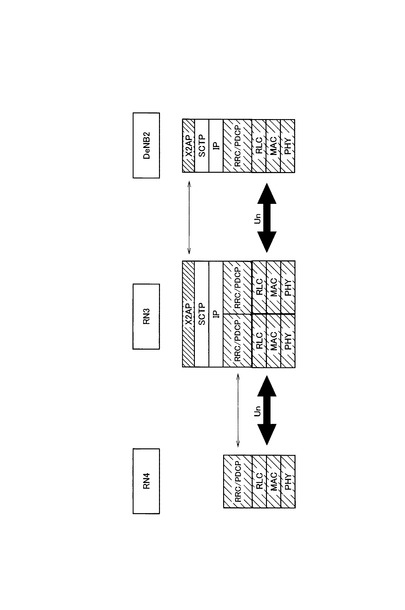
具体的には、図2に示すように、リレーノードRN4は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMAC(Media Access Control)レイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLC(Radio Link Control)レイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCP(Packet Data Convergence Protocol)レイヤ機能とを具備している。
【0022】
なお、リレーノードRN4は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRC(Radio Resource Control)レイヤ機能を具備してもよい。
【0023】
また、図2に示すように、リレーノードRN4は、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN4リレーノードRN3との間のセキュリティ処理を行うように構成されているIPレイヤ機能を具備し、IPレイヤ機能の上位レイヤ機能として、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能を具備してもよい。
【0024】
また、リレーノードRN4は、SCTPレイヤ機能の上位レイヤ機能として、ハンドオーバ処理に係る制御信号(例えば、「HO Request」や「HO Request ACK」等)を送受信するように構成されているX2APレイヤ機能を具備してもよい。
【0025】
同様に、無線基地局DeNB2は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMACレイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLCレイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCPレイヤ機能とを具備している。
【0026】
なお、無線基地局DeNB2は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRCレイヤ機能を具備してもよい。
【0027】
また、無線基地局DeNB2は、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN3と無線基地局DeNB2との間のセキュリティ処理を行うように構成されているIPレイヤ機能を具備し、IPレイヤ機能の上位レイヤ機能として、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能を具備してもよい。
【0028】
また、無線基地局DeNB2は、SCTPレイヤ機能の上位レイヤ機能として、ハンドオーバ処理に係る制御信号を送受信するように構成されているX2APレイヤ機能を具備してもよい。
【0029】
また、リレーノードRN3は、リレーノードRN4及び無線基地局DeNB2との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能を具備している。
【0030】
また、リレーノードRN3は、X2-C無線ベアラ機能の上位レイヤ機能として設けられているIPレイヤ機能と、IPレイヤ機能の上位レイヤ機能として設けられているSCTP機能と、SCTPレイヤ機能の上位レイヤ機能として設けられているX2APレイヤ機能とを具備している。
【0031】
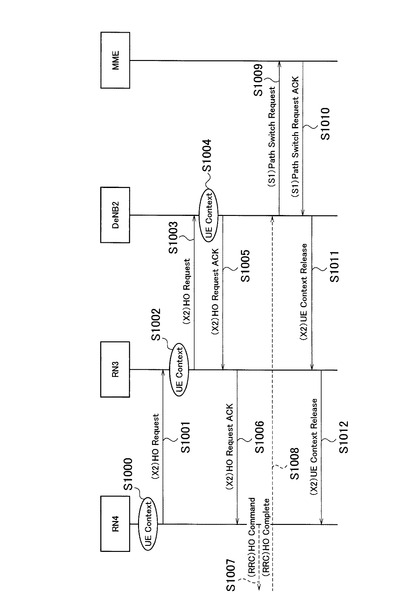
以下、図3を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0032】
図3に示すように、移動局UEの「UE Context」を管理しているリレーノードRN2が、ステップS1000において、移動局UEの第1状態から第2状態へのハンドオーバ処理を行うことを決定し、ステップS1001において、リレーノードRN3に対して、X2-C無線ベアラを介して、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を送信する。
【0033】
リレーノードRN3は、X2APレイヤ機能において、「HO Request」を受信すると、ステップS1002において、移動局UEの「UE Context」を記憶し、ステップS1003において、かかる「HO Request」を、X2-C無線ベアラを介して、無線基地局DeNB2に転送する。
【0034】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS1004において、移動局UEの「UE Context」を記憶し、ステップS1005において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0035】
リレーノードRN3は、X2APレイヤ機能において、「HO Request Ack」を受信すると、ステップS1006において、かかる「HO Request Ack」を、X2-C無線ベアラを介して、リレーノードRN4に転送する。
【0036】
ステップS1007において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0037】
ステップS1008において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0038】
ステップS1009において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0039】
ステップS1010において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0040】
ステップS1011において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信し、ステップS1012において、リレーノードRN3は、X2APレイヤ機能において、リレーノードRN4に対して、X2-C無線ベアラを介して、「UE Context Release」を転送し、リレーノードRN4は、「UE Context Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0041】
なお、図3において、リレーノードRN4と無線基地局DeNB2とが入れ替わってもよい。
【0042】
上述のように、リレーノードRN3におけるX2APレイヤ機能は、リレーノートRN4とリレーノードRN3との間におけるハンドオーバ処理に係る制御信号(X2AP信号)と、リレーノートRN3と無線基地局DeNB2との間におけるハンドオーバ処理に係る制御信号(X2AP信号)とを変換するように構成されている。
【0043】
また、リレーノードRN3におけるX2APレイヤ機能は、リレーノートRN4とリレーノードRN3との間で用いられている移動局IDと、リレーノートRN3と無線基地局DeNB2との間で用いられている移動局IDとを関連付けて管理するように構成されている。
【0044】
本実施形態に係る移動通信システムによれば、LTE方式の移動通信システムで用いられていた各装置のプロトコルスタックに対して、大きな改修を施すことなく、リレーノードRNが関連するハンドオーバ処理を実現することができる。
【0045】
(本発明の第2の実施形態に係る移動通信システム)
図4及び図5を参照して、本発明の第2の実施形態に係る移動通信システムについて説明する。以下、本発明の第2の実施形態に係る移動通信システムについて、上述の第1の実施形態に係る移動通信システムとの相違点に着目して説明する。
【0046】
具体的には、図4に示すように、リレーノードRN4は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMACレイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLCレイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCPレイヤ機能とを具備している。
【0047】
なお、リレーノードRN4は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRCレイヤ機能を具備してもよい。
【0048】
また、図4に示すように、リレーノードRN4は、移動局UEにおけるRRCレイヤ機能のプロキシとして動作するように構成されており、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN4とリレーノードRN3との間のセキュリティ処理を行うように構成されているIPレイヤ機能や、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能や、ハンドオーバ処理に係る制御信号を送受信するように構成されているX2APレイヤ機能を具備していない。
【0049】
また、無線基地局DeNB2及びリレーノードRN3のプロトコルスタックは、図2に示す第1の実施形態に係る移動通信システムのプロトコルスタックと同一である。
【0050】
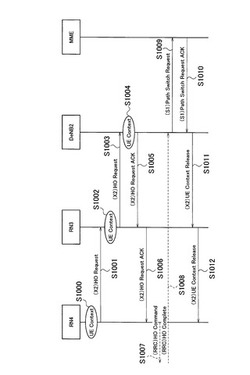
以下、図5を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0051】
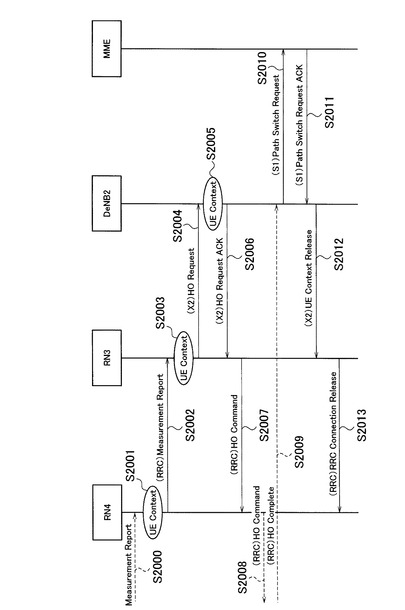
図5に示すように、リレーノードRN4は、ステップS2000において、移動局UEから「Measurement Report(測定報告)」を受信すると、ステップS2001において、管理している移動局UEの「UE Context」を取得して、ステップS2002において、RRCレイヤ機能によって、かかる移動局UEの「UE Context」を含む「Measurement Report」をリレーノードRN3に転送する。
【0052】
リレーノードRN3は、受信した「Measurement Report」に基づいて、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバ処理を行うことを決定し、ステップS2003において、移動局UEの「UE Context」を記憶し、ステップS2004において、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を、無線基地局DeNB2に対して、X2-C無線ベアラを介して送信する。
【0053】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS2005において、移動局UEの「UE Context」を記憶し、ステップS2006において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0054】
リレーノードRN3は、「HO Request Ack」を受信すると、ステップS2007において、リレーノードRN4に対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0055】
ステップS2008において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、受信した「HO Command」を転送する。
【0056】
ステップS2009において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0057】
ステップS2010において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0058】
ステップS2011において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0059】
ステップS2012において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信する。
【0060】
ステップS2013において、リレーノードRN3は、RRCレイヤ機能において、リレーノードRN4に対して、「RRC Connection Release」を転送し、リレーノードRN4は、「RRC Connection Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0061】
(本発明の第3の実施形態に係る移動通信システム)
図6及び図7を参照して、本発明の第3の実施形態に係る移動通信システムについて説明する。以下、本発明の第3の実施形態に係る移動通信システムについて、上述の第1の実施形態に係る移動通信システムとの相違点に着目して説明する。
【0062】
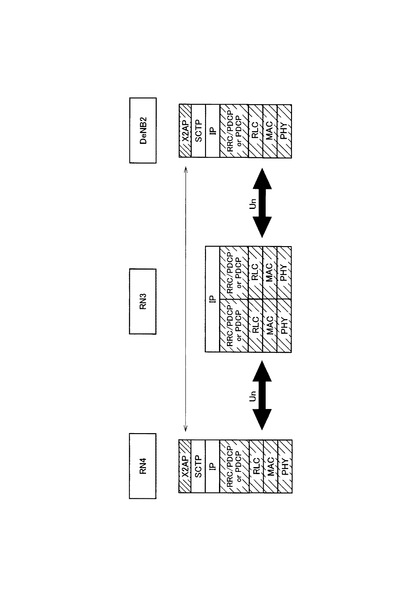
具体的には、図6に示すように、リレーノードRN3は、リレーノードRN4及び無線基地局DeNB2との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能を具備している。
【0063】
また、リレーノードRN3は、X2-C無線ベアラ機能の上位レイヤ機能として、IPレイヤ機能を具備しているが、IPレイヤ機能の上位レイヤ機能として、SCTP機能やX2APレイヤ機能を具備していない。
【0064】
なお、リレーノードRN4及び無線基地局DeNB2のプロトコルスタックは、図2に示す第1の実施形態に係る移動通信システムのプロトコルスタックと同一である。
【0065】
以下、図7を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0066】
図7に示すように、移動局UEの「UE Context」を管理しているリレーノードRN4は、ステップS3000において、移動局UEの第1状態から第2状態へのハンドオーバ処理を行うことを決定し、ステップS3001において、リレーノードRN3に対して、X2-C無線ベアラを介して、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を送信する。
【0067】
リレーノードRN3は、IPレイヤ機能によって、ステップS3002において、「HO Request」を受信すると、ステップS3003において、かかる「HO Request」を、X2-C無線ベアラを介して、無線基地局DeNB2に転送する。
【0068】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS3004において、移動局UEの「UE Context」を記憶し、ステップS3005において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0069】
リレーノードRN3は、IPレイヤ機能によって、「HO Request Ack」を受信すると、ステップS3006において、かかる「HO Request Ack」を、X2-C無線ベアラを介して、リレーノードRN4に転送する。
【0070】
ステップS3007において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0071】
ステップS3008において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0072】
ステップS3009において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0073】
ステップS3010において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0074】
ステップS3011において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信する。
【0075】
リレーノードRN3は、Iレイヤ機能によって、ステップS3012において、「UE Context Release」を受信すると、ステップS3013において、リレーノードRN4に対して、X2-C無線ベアラを介して、「UE Context Release」を転送し、リレーノードRN4は、「UE Context Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0076】
なお、上述の移動局UEやリレーノードRNや無線基地局eNBや交換局MMEの動作は、ハードウェアによって実施されてもよいし、プロセッサによって実行されるソフトウェアモジュールによって実施されてもよいし、両者の組み合わせによって実施されてもよい。
【0077】
ソフトウェアモジュールは、RAM(Random Access Memory)や、フラッシュメモリや、ROM(Read Only Memory)や、EPROM(Erasable Programmable ROM)や、EEPROM(Electronically Erasable and Programmable ROM)や、レジスタや、ハードディスクや、リムーバブルディスクや、CD-ROMといった任意形式の記憶媒体内に設けられていてもよい。
【0078】
かかる記憶媒体は、プロセッサが当該記憶媒体に情報を読み書きできるように、当該プロセッサに接続されている。また、かかる記憶媒体は、プロセッサに集積されていてもよい。また、かかる記憶媒体及びプロセッサは、ASIC内に設けられていてもよい。かかるASICは、移動局UEやリレーノードRNや無線基地局eNBや交換局MME内に設けられていてもよい。また、かかる記憶媒体及びプロセッサは、ディスクリートコンポーネントとして移動局UEやリレーノードRNや無線基地局eNBや交換局MME内に設けられていてもよい。
【0079】
以上、上述の実施形態を用いて本発明について詳細に説明したが、当業者にとっては、本発明が本明細書中に説明した実施形態に限定されるものではないということは明らかである。本発明は、特許請求の範囲の記載により定まる本発明の趣旨及び範囲を逸脱することなく修正及び変更態様として実施することができる。従って、本明細書の記載は、例示説明を目的とするものであり、本発明に対して何ら制限的な意味を有するものではない。
【符号の説明】
【0080】
UE…移動局
RN…リレーノード
eNB…無線基地局
MME…交換局
【技術分野】
【0001】
本発明は、移動通信システムに関する。
【背景技術】
【0002】
図8に示すように、3GPPで規定されているLTE方式(Release.8)の移動通信システムでは、移動局UEの無線基地局eNB#1から無線基地局eNB#2へのハンドオーバ処理が行われる際に、無線基地局eNB#1と無線基地局eNB#2との間で設定されているX2ベアラを介して、無線基地局eNB#1と無線基地局eNB#2との間で、ハンドオーバ処理に係る制御信号が送受信されるように構成されている。
【0003】
図8に示すように、無線基地局eNB#1及び無線基地局#2は、X2ベアラを設定するためのX2ベアラ機能として、ネットワークレイヤ1(NW L1)機能と、ネットワークレイヤ2(NW L2)機能と、IP(Internet Protocol)レイヤ機能と、SCTP(Stream Control Transmission Protocol)レイヤ機能とを具備している。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】3GPP TS36.423、「Technical Specification Group Radio Access Network;Evolved Universal Terrestrial Radio Access Network(E-UTRAN);X2 application protocol(X2AP)
【発明の概要】
【発明が解決しようとする課題】
【0005】
LTE方式の後継の通信方式であるLTE-Advanced方式の移動通信システムでは、移動局UEと無線基地局eNBとの間に、無線基地局eNBと同様な機能を具備する「リレーノード(Relay Node)RN」を接続することができる。
【0006】
しかしながら、従来の移動通信システムでは、リレーノードRNが接続された場合、どのように移動局UEのハンドオーバ処理を行うべきか規定されていないという問題点があった。
【0007】
そこで、本発明は、上述の課題に鑑みてなされたものであり、リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる移動通信システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の特徴は、移動通信システムであって、第1リレーノードと第2リレーノードとが無線ベアラを介して接続されており、前記第2リレーノードと無線基地局とが無線ベアラを介して接続されており、移動局が、前記第1リレーノードとの間で無線ベアラを設定し該第1リレーノードと前記第2リレーノードと前記無線基地局とを介して通信を行っている第1状態と、前記無線基地局との間で無線ベアラを設定し該無線基地局を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されており、前記ハンドオーバ処理において、前記第1リレーノードと前記第2リレーノードとの間の無線ベアラ及び該第2リレーノードと該無線基地局との間の無線ベアラを介して、前記ハンドオーバ処理に係る制御信号を送受信するように構成されていることを要旨とする。
【0009】
本発明の第1の特徴において、前記第1リレーノードは、前記移動局から測定報告を受信した場合、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに対して、該測定報告を転送するように構成されており、前記第2リレーノードは、前記測定報告に基づいて、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に送信するように構成されていてもよい。
【0010】
本発明の第1の特徴において、前記第1リレーノードは、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに送信するように構成されており、前記第2リレーノードは、受信した前記ハンドオーバ要求信号を、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に転送するように構成されていてもよい。
【発明の効果】
【0011】
以上説明したように、本発明によれば、リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる移動通信システムを提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の第1の実施形態に係る移動通信システムの全体構成図である。
【図2】本発明の第1の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図3】本発明の第1の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図4】本発明の第2の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図5】本発明の第2の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図6】本発明の第3の実施形態に係る移動通信システムにおけるプロトコルスタック図である。
【図7】本発明の第3の実施形態に係る移動通信システムの動作を示すシーケンス図である。
【図8】現状の移動通信システムにおけるプロトコルスタック図である。
【発明を実施するための形態】
【0013】
(本発明の第1の実施形態に係る移動通信システム)
図1乃至図3を参照して、本発明の第1の実施形態に係る移動通信システムについて説明する。
【0014】
本発明に係る移動通信システムは、LTE-Advanced方式の移動通信システムであって、例えば、図1に示すように、交換局MMEと、リレーノードRN1乃至RN4と、リレーノードRN1が接続されている無線基地局DeNB(Donor eNB)1と、リレーノードRN2及びRN3が接続されている無線基地局DeNB2と、無線基地局eNB1とを具備している。
【0015】
ここで、無線基地局DeNB1と無線基地局DeNB2とが、X2-Cインターフェイスを介して接続されており、無線基地局DeNB2と無線基地局eNB1とが、X2-Cインターフェイスを介して接続されている。
【0016】
また、無線基地局DeNB1、無線基地局DeNB2及び無線基地局eNB1のそれぞれと、交換局MMEとが、S1-MMEインターフェイスを介して接続されている。
【0017】
かかる移動通信システムにおいて、移動局UEは、無線基地局eNB(DeNB)及びリレーノードRNとの間で無線ベアラを設定して、無線通信を行うように構成されている。
【0018】
また、かかる移動通信システムでは、図1の(6)に示すように、移動局UEが、リレーノードRN4(第1リレーノード)との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3(第2リレーノード)と無線基地局DeNB2(無線基地局)とを介して通信を行っている第1状態と、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されている。
【0019】
また、かかるハンドオーバ処理において、リレーノードRN4とリレーノードRN3との間の無線ベアラ(Unインターフェイス)及びリレーノードRN3と無線基地局DeNB2との間の無線ベアラ(Unインターフェイス)を介して、ハンドオーバ処理に係る制御信号(X2AP信号)を送受信するように構成されている。
【0020】
なお、本実施形態では、リレーノードRN2と無線基地局DeNB2との間には、無線ベアラ(Unインターフェイス)が設定されないように構成されている。
【0021】
具体的には、図2に示すように、リレーノードRN4は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMAC(Media Access Control)レイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLC(Radio Link Control)レイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCP(Packet Data Convergence Protocol)レイヤ機能とを具備している。
【0022】
なお、リレーノードRN4は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRC(Radio Resource Control)レイヤ機能を具備してもよい。
【0023】
また、図2に示すように、リレーノードRN4は、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN4リレーノードRN3との間のセキュリティ処理を行うように構成されているIPレイヤ機能を具備し、IPレイヤ機能の上位レイヤ機能として、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能を具備してもよい。
【0024】
また、リレーノードRN4は、SCTPレイヤ機能の上位レイヤ機能として、ハンドオーバ処理に係る制御信号(例えば、「HO Request」や「HO Request ACK」等)を送受信するように構成されているX2APレイヤ機能を具備してもよい。
【0025】
同様に、無線基地局DeNB2は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMACレイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLCレイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCPレイヤ機能とを具備している。
【0026】
なお、無線基地局DeNB2は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRCレイヤ機能を具備してもよい。
【0027】
また、無線基地局DeNB2は、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN3と無線基地局DeNB2との間のセキュリティ処理を行うように構成されているIPレイヤ機能を具備し、IPレイヤ機能の上位レイヤ機能として、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能を具備してもよい。
【0028】
また、無線基地局DeNB2は、SCTPレイヤ機能の上位レイヤ機能として、ハンドオーバ処理に係る制御信号を送受信するように構成されているX2APレイヤ機能を具備してもよい。
【0029】
また、リレーノードRN3は、リレーノードRN4及び無線基地局DeNB2との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能を具備している。
【0030】
また、リレーノードRN3は、X2-C無線ベアラ機能の上位レイヤ機能として設けられているIPレイヤ機能と、IPレイヤ機能の上位レイヤ機能として設けられているSCTP機能と、SCTPレイヤ機能の上位レイヤ機能として設けられているX2APレイヤ機能とを具備している。
【0031】
以下、図3を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0032】
図3に示すように、移動局UEの「UE Context」を管理しているリレーノードRN2が、ステップS1000において、移動局UEの第1状態から第2状態へのハンドオーバ処理を行うことを決定し、ステップS1001において、リレーノードRN3に対して、X2-C無線ベアラを介して、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を送信する。
【0033】
リレーノードRN3は、X2APレイヤ機能において、「HO Request」を受信すると、ステップS1002において、移動局UEの「UE Context」を記憶し、ステップS1003において、かかる「HO Request」を、X2-C無線ベアラを介して、無線基地局DeNB2に転送する。
【0034】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS1004において、移動局UEの「UE Context」を記憶し、ステップS1005において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0035】
リレーノードRN3は、X2APレイヤ機能において、「HO Request Ack」を受信すると、ステップS1006において、かかる「HO Request Ack」を、X2-C無線ベアラを介して、リレーノードRN4に転送する。
【0036】
ステップS1007において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0037】
ステップS1008において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0038】
ステップS1009において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0039】
ステップS1010において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0040】
ステップS1011において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信し、ステップS1012において、リレーノードRN3は、X2APレイヤ機能において、リレーノードRN4に対して、X2-C無線ベアラを介して、「UE Context Release」を転送し、リレーノードRN4は、「UE Context Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0041】
なお、図3において、リレーノードRN4と無線基地局DeNB2とが入れ替わってもよい。
【0042】
上述のように、リレーノードRN3におけるX2APレイヤ機能は、リレーノートRN4とリレーノードRN3との間におけるハンドオーバ処理に係る制御信号(X2AP信号)と、リレーノートRN3と無線基地局DeNB2との間におけるハンドオーバ処理に係る制御信号(X2AP信号)とを変換するように構成されている。
【0043】
また、リレーノードRN3におけるX2APレイヤ機能は、リレーノートRN4とリレーノードRN3との間で用いられている移動局IDと、リレーノートRN3と無線基地局DeNB2との間で用いられている移動局IDとを関連付けて管理するように構成されている。
【0044】
本実施形態に係る移動通信システムによれば、LTE方式の移動通信システムで用いられていた各装置のプロトコルスタックに対して、大きな改修を施すことなく、リレーノードRNが関連するハンドオーバ処理を実現することができる。
【0045】
(本発明の第2の実施形態に係る移動通信システム)
図4及び図5を参照して、本発明の第2の実施形態に係る移動通信システムについて説明する。以下、本発明の第2の実施形態に係る移動通信システムについて、上述の第1の実施形態に係る移動通信システムとの相違点に着目して説明する。
【0046】
具体的には、図4に示すように、リレーノードRN4は、リレーノードRN3との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能として、物理(PHY)レイヤ機能と、物理(PHY)レイヤ機能の上位レイヤ機能として設けられているMACレイヤ機能と、MACレイヤ機能の上位レイヤ機能として設けられているRLCレイヤ機能と、RLCレイヤ機能の上位レイヤ機能として設けられているPDCPレイヤ機能とを具備している。
【0047】
なお、リレーノードRN4は、PDCPレイヤ機能の上位レイヤ機能として設けられているRRCレイヤ機能を具備してもよい。
【0048】
また、図4に示すように、リレーノードRN4は、移動局UEにおけるRRCレイヤ機能のプロキシとして動作するように構成されており、X2-C無線ベアラ機能の上位レイヤ機能として、リレーノードRN4とリレーノードRN3との間のセキュリティ処理を行うように構成されているIPレイヤ機能や、X2-C無線ベアラに対するキープアライブ処理を行うように構成されているSCTPレイヤ機能や、ハンドオーバ処理に係る制御信号を送受信するように構成されているX2APレイヤ機能を具備していない。
【0049】
また、無線基地局DeNB2及びリレーノードRN3のプロトコルスタックは、図2に示す第1の実施形態に係る移動通信システムのプロトコルスタックと同一である。
【0050】
以下、図5を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0051】
図5に示すように、リレーノードRN4は、ステップS2000において、移動局UEから「Measurement Report(測定報告)」を受信すると、ステップS2001において、管理している移動局UEの「UE Context」を取得して、ステップS2002において、RRCレイヤ機能によって、かかる移動局UEの「UE Context」を含む「Measurement Report」をリレーノードRN3に転送する。
【0052】
リレーノードRN3は、受信した「Measurement Report」に基づいて、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバ処理を行うことを決定し、ステップS2003において、移動局UEの「UE Context」を記憶し、ステップS2004において、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を、無線基地局DeNB2に対して、X2-C無線ベアラを介して送信する。
【0053】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS2005において、移動局UEの「UE Context」を記憶し、ステップS2006において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0054】
リレーノードRN3は、「HO Request Ack」を受信すると、ステップS2007において、リレーノードRN4に対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0055】
ステップS2008において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、受信した「HO Command」を転送する。
【0056】
ステップS2009において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0057】
ステップS2010において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0058】
ステップS2011において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0059】
ステップS2012において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信する。
【0060】
ステップS2013において、リレーノードRN3は、RRCレイヤ機能において、リレーノードRN4に対して、「RRC Connection Release」を転送し、リレーノードRN4は、「RRC Connection Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0061】
(本発明の第3の実施形態に係る移動通信システム)
図6及び図7を参照して、本発明の第3の実施形態に係る移動通信システムについて説明する。以下、本発明の第3の実施形態に係る移動通信システムについて、上述の第1の実施形態に係る移動通信システムとの相違点に着目して説明する。
【0062】
具体的には、図6に示すように、リレーノードRN3は、リレーノードRN4及び無線基地局DeNB2との間のX2-C無線ベアラ(Unインターフェイス)を設定するためのX2-C無線ベアラ機能を具備している。
【0063】
また、リレーノードRN3は、X2-C無線ベアラ機能の上位レイヤ機能として、IPレイヤ機能を具備しているが、IPレイヤ機能の上位レイヤ機能として、SCTP機能やX2APレイヤ機能を具備していない。
【0064】
なお、リレーノードRN4及び無線基地局DeNB2のプロトコルスタックは、図2に示す第1の実施形態に係る移動通信システムのプロトコルスタックと同一である。
【0065】
以下、図7を参照して、本実施形態に係る移動通信システムにおいて、移動局UEが、リレーノードRN4との間で無線ベアラを設定しリレーノードRN4とリレーノードRN3と無線基地局DeNB2とを介して通信を行っている第1状態から、無線基地局DeNB2との間で無線ベアラを設定し無線基地局DeNB2を介して通信を行っている第2状態に、ハンドオーバする動作について説明する。
【0066】
図7に示すように、移動局UEの「UE Context」を管理しているリレーノードRN4は、ステップS3000において、移動局UEの第1状態から第2状態へのハンドオーバ処理を行うことを決定し、ステップS3001において、リレーノードRN3に対して、X2-C無線ベアラを介して、移動局UEのリレーノードRN4から無線基地局DeNB2へのハンドオーバを要求する「HO Request(ハンドオーバ要求信号)」を送信する。
【0067】
リレーノードRN3は、IPレイヤ機能によって、ステップS3002において、「HO Request」を受信すると、ステップS3003において、かかる「HO Request」を、X2-C無線ベアラを介して、無線基地局DeNB2に転送する。
【0068】
無線基地局DeNB2は、「HO Request」を受信すると、ステップS3004において、移動局UEの「UE Context」を記憶し、ステップS3005において、リレーノードRN3に対して、X2-C無線ベアラを介して、「HO Request Ack(ハンドオーバ要求確認信号)」を送信する。
【0069】
リレーノードRN3は、IPレイヤ機能によって、「HO Request Ack」を受信すると、ステップS3006において、かかる「HO Request Ack」を、X2-C無線ベアラを介して、リレーノードRN4に転送する。
【0070】
ステップS3007において、リレーノードRN4は、移動局UEに対して、RRCレイヤ機能によって、無線基地局DeNB2にハンドオーバするように指示する「HO Command(ハンドオーバ指示信号)」を送信する。
【0071】
ステップS3008において、移動局UEは、RRCレイヤ機能によって、無線基地局DeNB2に対して、「HO Complete(ハンドオーバ完了信号)」を送信する。
【0072】
ステップS3009において、無線基地局DeNB2は、S1-MMEインターフェイスを介して、交換局MMEに対して、「Path Swith Request(パス切替要求信号)」を送信する。
【0073】
ステップS3010において、交換局MMEは、S1-MMEインターフェイスを介して、無線基地局DeNB2に対して、「Path Swith Request Ack(パス切替要求確認信号)」を送信すると共に、移動局UE宛ての信号の転送先を、リレーノードRN4から無線基地局DeNB2に切り替える。
【0074】
ステップS3011において、無線基地局DeNB2は、X2-C無線ベアラを介して、リレーノードRN3に対して、「UE Context Release」を送信する。
【0075】
リレーノードRN3は、Iレイヤ機能によって、ステップS3012において、「UE Context Release」を受信すると、ステップS3013において、リレーノードRN4に対して、X2-C無線ベアラを介して、「UE Context Release」を転送し、リレーノードRN4は、「UE Context Release」に応じて、移動局UEの「UE Context」の管理を終了する。
【0076】
なお、上述の移動局UEやリレーノードRNや無線基地局eNBや交換局MMEの動作は、ハードウェアによって実施されてもよいし、プロセッサによって実行されるソフトウェアモジュールによって実施されてもよいし、両者の組み合わせによって実施されてもよい。
【0077】
ソフトウェアモジュールは、RAM(Random Access Memory)や、フラッシュメモリや、ROM(Read Only Memory)や、EPROM(Erasable Programmable ROM)や、EEPROM(Electronically Erasable and Programmable ROM)や、レジスタや、ハードディスクや、リムーバブルディスクや、CD-ROMといった任意形式の記憶媒体内に設けられていてもよい。
【0078】
かかる記憶媒体は、プロセッサが当該記憶媒体に情報を読み書きできるように、当該プロセッサに接続されている。また、かかる記憶媒体は、プロセッサに集積されていてもよい。また、かかる記憶媒体及びプロセッサは、ASIC内に設けられていてもよい。かかるASICは、移動局UEやリレーノードRNや無線基地局eNBや交換局MME内に設けられていてもよい。また、かかる記憶媒体及びプロセッサは、ディスクリートコンポーネントとして移動局UEやリレーノードRNや無線基地局eNBや交換局MME内に設けられていてもよい。
【0079】
以上、上述の実施形態を用いて本発明について詳細に説明したが、当業者にとっては、本発明が本明細書中に説明した実施形態に限定されるものではないということは明らかである。本発明は、特許請求の範囲の記載により定まる本発明の趣旨及び範囲を逸脱することなく修正及び変更態様として実施することができる。従って、本明細書の記載は、例示説明を目的とするものであり、本発明に対して何ら制限的な意味を有するものではない。
【符号の説明】
【0080】
UE…移動局
RN…リレーノード
eNB…無線基地局
MME…交換局
【特許請求の範囲】
【請求項1】
第1リレーノードと第2リレーノードとが無線ベアラを介して接続されており、
前記第2リレーノードと無線基地局とが無線ベアラを介して接続されており、
移動局が、前記第1リレーノードとの間で無線ベアラを設定し該第1リレーノードと前記第2リレーノードと前記無線基地局とを介して通信を行っている第1状態と、前記無線基地局との間で無線ベアラを設定し該無線基地局を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されており、
前記ハンドオーバ処理において、前記第1リレーノードと前記第2リレーノードとの間の無線ベアラ及び該第2リレーノードと該無線基地局との間の無線ベアラを介して、前記ハンドオーバ処理に係る制御信号を送受信するように構成されていることを特徴とする移動通信システム。
【請求項2】
前記第1リレーノードは、前記移動局から測定報告を受信した場合、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに対して、該測定報告を転送するように構成されており、
前記第2リレーノードは、前記測定報告に基づいて、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に送信するように構成されていることを特徴とする請求項1に記載の移動通信システム。
【請求項3】
前記第1リレーノードは、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに送信するように構成されており、
前記第2リレーノードは、受信した前記ハンドオーバ要求信号を、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に転送するように構成されていることを特徴とする請求項1に記載の移動通信システム。
【請求項1】
第1リレーノードと第2リレーノードとが無線ベアラを介して接続されており、
前記第2リレーノードと無線基地局とが無線ベアラを介して接続されており、
移動局が、前記第1リレーノードとの間で無線ベアラを設定し該第1リレーノードと前記第2リレーノードと前記無線基地局とを介して通信を行っている第1状態と、前記無線基地局との間で無線ベアラを設定し該無線基地局を介して通信を行っている第2状態との間で、ハンドオーバ処理を行うように構成されており、
前記ハンドオーバ処理において、前記第1リレーノードと前記第2リレーノードとの間の無線ベアラ及び該第2リレーノードと該無線基地局との間の無線ベアラを介して、前記ハンドオーバ処理に係る制御信号を送受信するように構成されていることを特徴とする移動通信システム。
【請求項2】
前記第1リレーノードは、前記移動局から測定報告を受信した場合、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに対して、該測定報告を転送するように構成されており、
前記第2リレーノードは、前記測定報告に基づいて、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に送信するように構成されていることを特徴とする請求項1に記載の移動通信システム。
【請求項3】
前記第1リレーノードは、前記移動局の前記第1状態から前記第2状態へのハンドオーバ処理を開始することを決定した場合、その旨を通知するハンドオーバ要求信号を、前記ハンドオーバ処理に係る制御信号として、該第1リレーノードと前記第2リレーノードとの間の無線ベアラを介して、該第2リレーノードに送信するように構成されており、
前記第2リレーノードは、受信した前記ハンドオーバ要求信号を、前記第2リレーノードと該無線基地局との間の無線ベアラを介して、該無線基地局に転送するように構成されていることを特徴とする請求項1に記載の移動通信システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−55687(P2013−55687A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−250278(P2012−250278)
【出願日】平成24年11月14日(2012.11.14)
【分割の表示】特願2009−110011(P2009−110011)の分割
【原出願日】平成21年4月28日(2009.4.28)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成24年11月14日(2012.11.14)
【分割の表示】特願2009−110011(P2009−110011)の分割
【原出願日】平成21年4月28日(2009.4.28)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]