
Fターム[5K067JJ55]の内容
移動無線通信システム (440,489) | マルチチャネル、ゾーン制御 (24,318) | 移動局の位置決定 (7,783) | 受信レベルによるもの (641) | レベル情報の転送 (90)
Fターム[5K067JJ55]に分類される特許
1 - 20 / 90
移動通信システム
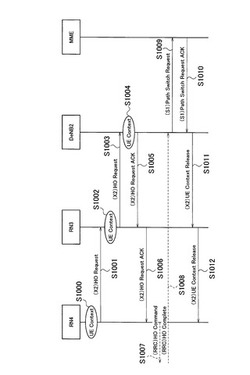
【課題】リレーノードが接続された場合であっても、移動局のハンドオーバ処理を実現することができる。
【解決手段】本発明に係る移動通信システムでは、ハンドオーバ処理において、リレーノードRN4とリレーノードRN3との間の無線ベアラ及びリレーノードRN3無線基地局DeNB2との間の無線ベアラを介して、ハンドオーバ処理に係る制御信号を送受信するように構成されている。
(もっと読む)
カラオケネットワークシステム及びカラオケ装置

【課題】カラオケネットワークシステムにおいて、1台の無線LANアクセスポイント(AP)における無線通信端末の接続数が過大にならないように、複数のAP内で接続先を分散させる。
【解決手段】カラオケ装置4は、自ら保有する接続先リストと、通信相手のリモコン端末5から取得した電波強度情報とに基づいて、そのリモコン端末5が接続すべきAPを選択し、接続先を当該リモコン端末5に指示する。リモコン端末5は指示されたAPに無線接続する。その際、当該リモコン端末5が検出したAPの中で電波強度が最大でかつ、そのAPでの接続端末数が閾値未満であることが第1接続候補の選択条件となる。第1接続候補の接続端末数が閾値以上である場合には、次点で電波強度が大きい第2接続候補を接続先に選択するか、既に第1接続候補に接続済みの他のリモコン端末5を他の接続先に切替えさせた上で、通信相手のリモコン端末5を第1接続候補に接続させる。
(もっと読む)
通信システム、基地局及び通信制御方法
【課題】複数の基地局における協調用リソースの管理を確実に行うことができるとともに、複数の基地局からの協調送信の効率を向上させることができる通信システム、基地局及び通信制御方法を提供する。
【解決手段】協調元の基地局110は、データの協調送信に用いる周波数を含む協調用リソースを決定し、協調先の基地局120から協調用リソースを借り受けて、借り受けた協調用リソースを基地局110から遠隔的に制御できるようにし、基地局120へデータ及び協調制御情報を送信し、協調用リソースの情報に基づいてデータを端末200に送信する。基地局120は、基地局110によって決定された協調用リソースを基地局110から遠隔的に制御できるように貸し出し、基地局110からデータ及び協調制御情報を受信し、その協調制御情報に基づいて、基地局110から遠隔的に制御された協調用リソースを介して端末200にデータを送信する。
(もっと読む)
移動通信システム、ハンドオーバ制御方法、無線基地局及びプログラム
【課題】 ハンドオーバ先無線基地局における移動局へのチャネル割り当て精度を向上することができる移動通信システムを得る。
【解決手段】 移動局と、移動局のハンドオーバ元無線基地局と、移動局のハンドオーバ先無線基地局とを含む移動通信システム。移動局は、移動局とハンドオーバ先無線基地局との間の無線品質情報をハンドオーバ元無線基地局に送信する手段を備える。ハンドオーバ元無線基地局は、無線品質情報をハンドオーバ先無線基地局に送信する手段を備える。
(もっと読む)
基地局及びセルラ無線通信システム
【課題】端末からフェムトセル基地局への上り通信において、フェムトセル基地局内の端末に対して高スループット通信を実現し、かつ、マクロセル基地局の端末に対する与干渉を抑える。
【解決手段】フェムトセル基地局は、セル内端末の分布を収集し、セル内端末の中から、セルセンタおよびセルエッジを代表する端末を選択する。さらに、フェムトセル基地局は、セルセンタ、セルエッジの端末それぞれについて、マクロセル基地局が許容可能な最大送信電力を計算する。フェムトセル基地局は、前記最大送信電力を超えない範囲で、セルセンタおよびセルエッジの送信電力をそれぞれ決定し、決定した電力値に端末が制御できるように、送信電力制御のパラメータを調節して、端末に対して通知する。
(もっと読む)
無線通信装置
【課題】ハードハンドオーバを行う移動通信システムにおいて、ハンドオーバ時のデータの瞬断の時間を出来るだけ短くし、効果的にハードハンドオーバを実現する無線通信装置を提供する。
【解決手段】 移動端末は、ハンドオーバを行う場合、移動元基地局から移動先基地局の情報や、移動先基地局へ送るべきランダムアクセス信号に使うシーケンスに関する情報を受け取る。移動先基地局から送られてくる同期チャネル信号を受信する。すると、移動端末は、同期チャネルを受信したタイミングから所定時間オフセット後のタイミングであって、同期チャネルに対応する周波数でランダムアクセス信号を移動先基地局に送る。
(もっと読む)
無線位置検出システムと無線位置検出方法
【課題】現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
(もっと読む)
無線通信システムのハード・ハンドオフサーチと短いメッセージ送信を調整するための方法と装置
【課題】移動局がハード・ハンドオフをする代替のシステムをサーチする時間をコーディネートする。
【解決手段】移動局は代替のシステムの存在の表示をサーチするために代替の周波数に同調するときに関して移動局を指示する命令を移動局は受信する。所定の時間が開始基地局と移動局の両者に共通する時間の基準ポイントに関して定義される。移動局は代替の周波数に同調して、それらの所定の時間の間のみサーチを実行する。さらに、移動局は、代替のシステムをサーチした結果を表示する送信報告を、それらの報告が移動局が開始周波数に同調するときに移動局から送信されるようにコーディネートする。
(もっと読む)
無線通信システムのハード・ハンドオフサーチと短いメッセージ送信を調整するための方法と装置
【課題】移動局がハード・ハンドオフをする代替のシステムをサーチする時間をコーディネートする。
【解決手段】移動局は代替のシステムの存在の表示をサーチするために代替の周波数に同調するときに関して移動局を指示する命令を移動局は受信する。所定の時間が開始基地局と移動局の両者に共通する時間の基準ポイントに関して定義される。移動局は代替の周波数に同調して、それらの所定の時間の間のみサーチを実行する。さらに、移動局は、代替のシステムをサーチした結果を表示する送信報告を、それらの報告が移動局が開始周波数に同調するときに移動局から送信されるようにコーディネートする。
(もっと読む)
位置探索方法、情報処理システム、移動体通信端末、および情報管理装置
【課題】移動体通信端末の位置を固定基地局またはアクセスポイントから受信する信号の電界強度を用いて高精度に特定することができるようにする。
【解決手段】本実施形態に係る位置探索方法において、移動体通信端末は通信可能な基地局等から受信する無線信号の電界強度を測定し、基地局等を識別する識別情報を検出し、複数の基地局等からの電界強度と識別情報とを対応付けて情報管理装置に送信するように制御し、情報管理装置は、各基地局等に関する電界強度の等値線を示す等値線マップを作成し、識別情報により識別される複数の基地局等に関する複数の等値線マップを重畳し、重畳される複数の等値線マップを用いて、移動体通信端末と通信可能な複数の基地局等からの無線信号の電界強度に基づく各等値線の交点を測定地点候補として抽出し、複数の測定地点候補に基づいて移動体通信端末の位置を決定することができる。
(もっと読む)
移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。
【課題】3基地局からの位置情報が無い場合でも、移動機の位置を標定でき、かつ三角測量原理のような計算を必要としない位置標定技術を提供する。現状の移動通信システムの基地局や移動機、さらに基地局を制御する基地局制御装置に機器や機能の追加をする必要がなく、また移動機がGPS機能付き移動機で位置情報を取得する必要性もなく、移動機の位置標定を行えるようにする。
【解決手段】移動機が、呼接続時またはハンドオフ要求時または切断時に基地局201、202、203を介して基地局制御部に送信するメッセージに含まれる情報から、移動機と基地局との距離に関する情報および通信路を設定している基地局の基地局識別情報に基づき、移動機の位置を標定する。
(もっと読む)
基地局配置支援システム、および基地局配置支援方法
【課題】各基地局の利用状況を定量化し、必要な、または不要な基地局を特定することのできる基地局配置支援システムを提供する。
【解決手段】基地局配置支援システムにおいて、測位領域に配置した基地局全体の集合から基地局の組合せを生成する基地局組合せ生成部300と、基地局組合せ生成部300により特定された各基地局組合せと、基地局と位置検知対象との測定データとから、各位置検知対象である測定機器の位置を計算する位置計算部400と、位置計算部400により計算された位置と実際の位置との誤差を特定する基地局組合せ誤差計算部500と、基地局組合せ誤差計算部500により計算された誤差から個々の基地局の必要度または不要度を計算する基地局必要・不要度計算部600と、基地局必要・不要度計算部600により計算された基地局必要度または基地局不要度を出力する結果出力部700とを備える。
(もっと読む)
測位システム及び制御方法
【課題】移動局無線機12の測位において、各地点の電界強度を事前に実測すること及びビーコン送信機11−移動局無線機12間の距離を計算することを省略し、かつビーコン送信機11の配備数を少なくする。
【解決手段】複数のビーコン送信機11は、測位空間19内にほぼ等密度で分布して配備され、自機のIDを含むビーコンを周囲へ発射する。移動局無線機12のビーコン受信機13は、近辺のビーコン送信機11からのビーコンを受信して、その電界強度を測定する。基地局15では、移動局無線機12からビーコン情報を受信し(S51)、ビーコン送信位置情報テーブルを参照して、ビーコン送信位置を求める(S52)。さらに、各ビーコンについて送信位置と移動局無線機12における電界強度の比とに基づき移動局無線機12の現在位置を算出する(S53)。
(もっと読む)
基地局装置、移動通信システム、およびハンドオーバ制御方法
【課題】端末の移動速度に応じて良好にハンドオーバを実行することを可能にする技術を提供する。
【解決手段】速度取得手段は、自装置に接続している端末装置の移動速度を取得する。判定手段は、自装置である移動元の基地局装置からの信号の端末装置での受信信号強度と移動先の基地局装置からの信号の端末装置での受信信号強度とのレベル差と、端末装置の移動速度に基づいて定まる第1の閾値とを比較し、レベル差が第1の閾値以上であれば、端末装置を移動元の基地局装置から移動先の基地局装置にハンドオーバすべきと判定する。
(もっと読む)
SR−VCC移動性におけるフロー中断の低減
本発明の1つの目的は、ユーザ機器UEに関する単一無線音声呼継続性SRVCC移動性におけるフロー中断の低減の方法であり、SRVCC移動性は、ハンドオーバHO実行手続きおよび音声呼継続性VCC手続きを含み、前記方法はHO実行手続きおよびVCC手続きを調整するため、UEにおいてHO実行を遅らせるステップを含む。 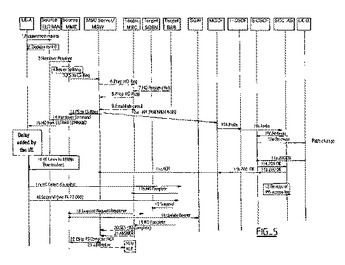 (もっと読む)
(もっと読む)
PSからCSへのハンドオーバ・インジケータ
【課題】本発明は、パケット交換網から回線交換網へのユーザ装置に関する接続のハンドオーバを処理するための解決策に関する。
【解決手段】これはノード及びシステムに実装される方法として提供される。この方法は、通信ネットワークと無線で(111)通信するユーザ装置、即ち、UE(101)を接続する通信ネットワーク(100)において提供される。この方法は、パケット交換、即ち、PSベースのネットワーク(102)から回線交換、即ち、CSベースのネットワーク(103)へのハンドオーバが要求されたことを検出するステップ(301)と、ソース・モビリティ管理ノード(104)において単一無線音声呼び出し継続、即ち、SVRCCを開始するステップ(302)と、音声関連パラメータに関する情報及びPSからCSへのハンドオーバ・インジケータによって非音声コンポーネントについてPSからCSへのハンドオーバを開始するステップ(303)と、ハンドオーバを実行するステップ(304)と、非音声関連パラメータ及びPSからCSへのハンドオーバ・インジケータによってターゲット・モビリティ管理ノード(105)からサービング・ゲートウェイ、即ち、SGW(107)に更新要求を送信するステップ(305)と、SGWからパケット・データ・ネットワーク・ゲートウェイ、即ち、PGW(108)に更新要求を転送するステップ(306)と、PGWにおいて更新要求を受信し、PSからCSへのハンドオーバ・インジケータを検出し、PGWにおいてPSからCSへのハンドオーバ・インジケータを処理するステップ(307)とを含む。
(もっと読む)
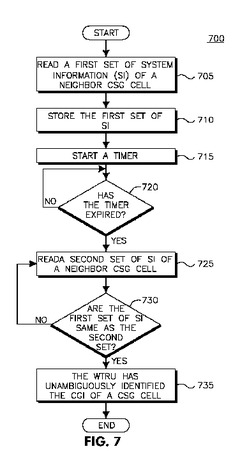
限定加入者グループに対してインバウンドモビリティを提供するためのPCIの混乱を解決する方法および装置
限定加入者グループ(CSG)セルとハイブリッドセルとに対してインバウンドモビリティを提供するための方法および装置が、説明される。無線送信/受信ユニット(WTRU)は、セルグローバル識別情報CGIと物理セル識別情報PCIとを含む、隣接限定加入者グループCSGの第1の組のシステム情報を読み取る(705)。次いで、タイマは、開始される(715)。システム情報は、前記タイマの満了(720)の後に再読み取りされる(725)。WTRUは、第1の組の情報と第2の組の情報とが同じである場合(730)に、CSGセルのCGIをあいまい性なく識別している(735)。
 (もっと読む)
(もっと読む)
測位サーバ、測位システム及び測位方法
【課題】移動機の位置を高精度に測定すること。
【解決手段】携帯電話機30の位置を測定する測位サーバ40は、基地局Bから送信された信号に関する第1信号情報と、他の無線信号源Sから送信された信号に関する第2信号情報と、位置座標とが関連付けられた測位用データを記憶する測位用データベース41と、第1信号情報及び第2信号情報の少なくとも一方を携帯電話機30から受信する受信部42と、受信された信号情報とデータベース内の測位用データとを照合し、該信号情報と対応する位置座標を携帯電話機30の現在位置として決定する測位部43と、を備える。
(もっと読む)
アクセス端末による遅延されたハンドオーバの条件付開始
ラジオ・リンクの切断を宣言する場合及び/又はあるハンドオーバ動作を遅延させる場合、ターゲット・アクセス・ポイントの状態を考慮に入れることによって、通信システムにおいて発生する数々のハンドオーバ関連の失敗を低減することができる。いくつかの局面において、ラジオ・リンクの失敗の検出及びアクセス端末制御の移動のための基準は、移動のターゲットとして利用可能でありうる近隣セルに関連するアクセス・ポイント・パラメータを考慮に入れることができる。例えば、ラジオ層問題レポートに基づいてラジオ・リンクの切断を検出するためのフィルタリング・メカニズムも、様々な近隣アクセス・ポイントの利用可能性及びそれらの測定された信号強度を考慮に入れることができる。更に、ハンドオーバ・コマンドが従来のシステムよりも早く送信され(例えば、ハンドオーバ・コマンドは、ターゲット・アクセス・ポイントがソース・アクセス・ポイントよりも弱いうちに送信されうる)、ハンドオーバ・コマンドは、指定された条件が満たされるまでアクセス端末にハンドオーバを遅延させる指示を備えることができる。例えば、ハンドオーバは、ターゲット・アクセス・ポイントがソース・アクセス・ポイントよりも強くなるまで遅延されうる。 (もっと読む)
位置検出装置、位置検出システム、位置検出方法およびプログラム
【課題】移動体に測位データを送信する手段を設けることなく、移動体の外部でその位置を精度よく検出する。
【解決手段】無線タグ3から電波で送信される固有のデータを含む信号を受信して、その電波の到来方向を検出する2以上の測位器2から、受信した信号とその到来方向を含むタグ情報31を、ネットワークを介して受信する受信部11と、受信部11で測位器2から受信したタグ情報31ごとに、その到来方向と測位器2の位置の情報から算出される、無線タグ3の位置データ33を取得する位置データ算出部12と、同じ固有のデータを含むタグ情報31について、直近の所定の時間に受信したタグ情報31から算出される位置データ33を、そのタグ情報31を検出した測位器2からそのタグ情報31の位置データ33で表される位置までの距離に応じた係数で重み付けした加重平均を計算して、無線タグ3の位置を算出する位置算出部13と、を備える。
(もっと読む)
1 - 20 / 90
[ Back to top ]