
無線位置検出システムと無線位置検出方法

【課題】現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、無線位置検出システムと無線位置検出方法に関し、例えば移動を前提としたアクティブ型無線タグの位置を正確に、かつ簡単に推定するシステムと方法に利用して有効な技術に関するものである。
【背景技術】
【0002】
特開2007−043587号公報には、移動可能な端末と、該端末からの接続を許容する複数の基地局と、上記端末および基地局からの信号を受信する複数の無線受信局とからなる無線位置検出システムを屋内等で運用する際に、該端末の位置検出誤差を低減する方法とシステムの実現に向けて、端末の位置検出の地理的範囲を示す複数の位置検出エリアの定義と、上記各位置検出エリアにおいて端末の位置を検出するために該各エリアに割り当てた予め位置が既知である複数の無線受信局を、特定するための定義とに基づいて、各無線受信局が受信した端末からの無線信号に関する測定結果を、上記位置検出エリア毎に評価し、該端末の位置を決定することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−043587号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明者においては、アクティブ型無線タグ(子機)を資産(パソコン等)に取り付け、その位置を管理する盗難防止システム、上記無線タグを特殊車輌等に取り付け、移動範囲を把握・分析する運行管理システム、上記無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システム、あるいは上記無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システム等を検討した。
【0005】
前記特許文献1に記載の位置検出技術を利用して前記各システムを実効あるものにするためには、上記無線タグの位置をより正確に把握する必要があり、事前に無線タグの受信信号強度(RSSI)値とアンテナ親機との距離の対応関係を、より正確に実測することにより求める必要がある。しかし、そのためには、多くの工数を必要とし、かつ、レイアウト変更等でRSSI値が変化した場合には、それまでの実測値は不適切な値となるため、レイアウト変更等の度に再度実測し直す必要がある。
【0006】
この発明の目的は、現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする無線位置検出システムと無線位置検出方法を提供することにある。この発明の前記ならびにそのほかの目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0007】
本願において開示される1つの実施例は、以下の通りである。無線位置検出システムは、監視エリアにおける特定の位置に分散して配置された複数の親機と、上記監視エリアにおける特定の位置に分散して配置され、基準となる複数の第1無線タグと、移動体に取り付けられ、上記第1無線タグと同じ性能を持つように製造された第2無線タグと、上記複数の親機に対して無線信号の授受を行う無線制御装置と、データ処理装置とを有する。上記データ処理装置は、上記無線制御装置を制御して上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記監視エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する。
【0008】
本願において開示される他の1つの実施例は、以下の通りである。無線位置検出方法として、監視エリアにおける特定の位置に分散して複数の親機を配置し、上記監視エリアにおける特定の位置に分散して基準となる複数の第1無線タグを配置し、位置監視すべき移動体に上記第1無線タグと同じ性能を持つように製造された第2無線タグを取り付ける。上記複数の親機に対して無線信号の授受を行う無線制御装置とそれを制御するデータ処理装置とを用い、上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記監視エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する。
【発明の効果】
【0009】
親機と基準となる無線タグの設置により相対的な位置関係及び受信電界強度データを利用することにより、現場での調整・設置に要する工数を低減し、容易に管理対象の無線タグの位置を推定可能となる。無線タグの位置が把握可能になるため、その無線タグを取り付けた対象物(人、物)の移動やその範囲、現在位置等を管理するシステムを構築することができる。
【図面の簡単な説明】
【0010】
【図1】この発明に係る無線位置検出システムの一実施例のブロック図である。
【図2】図1の無線位置検出システムの動作の一実施例のフローチャート図である。
【図3】この発明に用いられる「標準RSSI値・距離曲線」を取得するための親機と子機の説明図である。
【図4】図3の受信信号強度(RSSI)値を取得する測定方法の一実施例のフローチャート図である。
【図5】図3及び図4で説明したアンテナ出力別の「標準RSSI値・距離曲線」図である。
【図6】この発明が適用されるシステムに対応した親機と子機の説明図である。
【図7】図6の親機A→親機DのRSSI値・距離曲線図である。
【図8】この発明に係る距離位置推定処理を行うRSSI値・距離曲線の説明図である。
【図9】図2のステップ(10)の追加説明で示した前記「RSSI値・距離換算テーブル」の作成方法の説明図である。
【図10】この発明に係る管理対象の無線タグの現在位置表示方法の説明図である。
【図11】この発明に係る管理対象の無線タグの推定距離の換算方法の説明図である。
【図12】表示画面の描画距離の換算方法の一実施例の説明図である。
【図13】管理対象の無線タグの位置推定方法の一実施例の説明図である。
【図14】この発明に係る無線位置検出システムの他の一実施例のブロック図である。
【図15】この発明に係る無線位置検出システムの更に他の一実施例のブロック図である。
【発明を実施するための形態】
【0011】
添付の図面に沿って、この発明の好ましい実施の形態について詳細に説明する。
【実施例】
【0012】
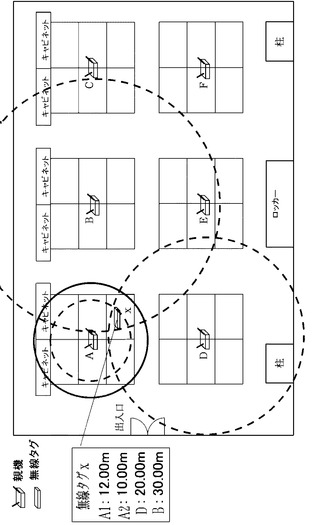
図1には、この発明に係る無線位置検出システムの一実施例のブロック図が示されている。この実施例は、例えば無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システムあるいは上記無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システムに向けられている。倉庫あるいはセキュリティ区域等のような管理エリアには、複数のキャビネットが設置されている。また、この実施例の管理エリアには、ロッカーや出入口や建物の柱が設けられているものとする。
【0013】
上記管理エリアには、複数の親機(基地局)と、基準となる無線タグ(子機)とが固定的に設置される。複数の親機は、代表として親機(010)が例示され、基準となる複数の無線タグは、代表として無線タグ(020)が例示されている。上記管理エリアには、特に制限されないが、3×2個のキャビネット組が出入口から奥に向かって2列に並んで6組が配置されている。3×2個の各キャビネット組の間は通路が設けられている。
【0014】
親機は、例示されている親機(010)のように3×2個のキャビネット組の中央部に1個が配置され、管理エリア全体では合計で6個の親機が各キャビネット組に設置される。つまり、親機(010)をAとして、親機AないしCと、親機DないしFとが前記2列に並んだ3×2個のキャビネット組に対応して配置されている。各親機A〜Fは、特に制限されないが、倉庫あるいはセキュリティ区域の天井部に配置され、親機A(010)〜Fのそれぞれの真下の位置に1個ずつの子機としての無線タグa(020)〜fが基準となる無線タグとして前記同様に管理エリア全体では合計で6個が固定的に配置されている。これに対して、例示されている無線タグ(030)は、無線タグxとして管理対象となる対象物(固定資産や人等)である移動体に取り付けられる。
【0015】
前記各親機A〜Fは、各子機(無線タグ)a〜fとxとの間で無線LANで通信をする無線アンテナの基地局である。無線制御装置(040)は、また無線LANを用いて、各無線親機(010)等を制御すると共に、各子機a〜fとxの位置情報(アンテナID、RSSI値、子機区分等)を収集する。データ処理装置(050)は各子機a〜fとxから無線制御装置(040)経由で送られてきたデータを記憶装置DBに格納すると共に処理をし、各管理対象の無線タグxの位置を推定する。表示装置(060)は、無線タグxの現在位置やその履歴を図や表で表示する。無線制御装置(040)、データ処理装置(050)および表示装置(060)はネットワークで接続されており、相互にテータ通信が可能である。
【0016】
基準となる無線タグa〜f(020)と管理対象となる対象物に取り付けられる無線タグx(030)は同一の性能を持った製品であり、基準となる無線タグa〜f(020)は固定的に取り付けられるが、無線タグx(030)は管理対象となる対象物(固定資産や人等)となる移動体に取り付けられるという役割を異にするだけであり、子機区分で使い分けられる。
【0017】
各親機A〜Fの位置情報は管理エリア内に設置をする際に、管理エリア内での距離の実測を行う。つまり、管理エリア内での各親機A〜Fの位置情報は既知のものとしてデータベースに格納されている。無線制御装置(040)では、各親機A〜F(010)と対で設置した各基準となる無線タグa〜f(020)の受信信号強度(RSSI)値を順次測定し、データ処理装置(050)にデータを送信する。つまり、一定の時間間隔で各基準となる無線タグa〜f(020)の受信信号強度(RSSI)値がいわばリアルタイムで最新のものが取得されている。知りたい無線タグx(030)の各親機A〜Fに対する受信信号強度(RSSI)値を、各親機A〜Fに対する各基準となる無線タグa〜f(020)との間のA〜Fとの間の受信信号強度(RSSI)値を参照して、各親機A〜F(子機a〜f)の管理エリア内の位置情報から、知りたい無線タグx(030)が存在する管理エリア内の位置を推定する。
【0018】
最も判りやすい例は、基準となる無線タグaと実質的に同じ位置に無線タグxがあるときには、無線タグaおける各親機A〜Fからの受信信号強度(RSSI)値と無線タグxおける各親機A〜Fからの受信信号強度(RSSI)値とが同じになるので、無線タグxは、基準の無線タグaと同じ場所、つまり、親機Aの真下に存在することが判る。前記基準となる無線タグa〜f(020)の受信信号強度(RSSI)値がいわばリアルタイムで最新のものが取得されているので、管理エリア内のレイアウト変更やロッカーの追加や位置変更等により、それに対応した無線タグa〜f(020)の受信信号強度(RSSI)値が基準となるので、このようなレイアウト変更等による受信状態の変更にも柔軟に対応することができる。
【0019】
例えば、基準となる無線タグ及び管理対象物に取り付けられた無線タグは、後述する3点測定のために、一定間隔(デフォルト:2分)で全無線アンテナの親機と通信を行い、各無線タグに対応した最も強い受信信号強度の無線アンテナの親機を検知して3点切り替え情報を通信する。コマンド制御により、この通信時間は20秒、1分、2分、3分、5分に制御できる。そして、前記各無線タグは、一定間隔(デフォルト:10秒)で存在確認情報をそれぞれに対応した3つの無線アンテナの親機と通信を行う。コマンド制御により通信時間は、1秒、10秒、20秒、30秒、1分のように制御できるようにされる。これらの時間間隔は、システム構成や無線タグの電池寿命等を考慮して設定される。
【0020】
実際には、図1のように知りたい無線タグx(030)の位置は任意であり、基準となる無線タグa〜fの中間部に存在することが多い。この場合には、基準となる無線タグa〜fにおける各親機A〜Fからの受信信号強度(RSSI)値から距離と電界強度の関係を推定して無線タグxの位置を推定することができる。
【0021】
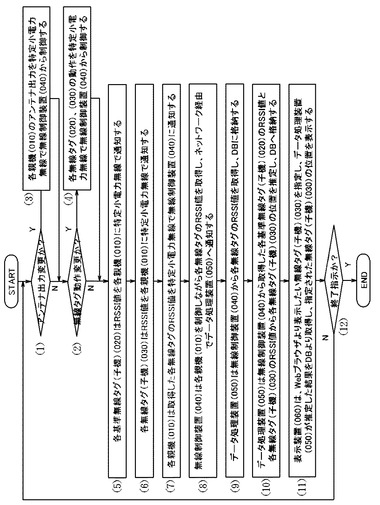
図2には、図1の無線位置検出システムの動作の一実施例のフローチャート図が示されている。
【0022】
ステップ(1)では、アンテナ出力変更かが判断される。変更する場合(Y)にはステップ(3)で各親機(010)A〜Fのアンテナ出力を特定小電力無線で無線制御装置(040)から制御してステップ(2)に移行する。変更しない場合(N)にはステップ(2)に移行する。
【0023】
ステップ(2)では、無線タグ動作変更かが判断される。変更する場合(Y)にはステップ(4)で各無線タグ(020)a〜f,(030)xの動作を特定小電力無線で無線制御装置(040)から制御してステップ(5)に移行する。変更しない場合(N)にはステップ(5)に移行する。このようなステップ(1)ないし(4)により、ステップ(5)以降で行われる位置特定のための親機及び子機の無線LANで通信をする際の動作条件設定が行われる。
【0024】
ステップ(5)では、各基準無線タグ(020)a〜fは、それぞれが各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。
【0025】
ステップ(6)では、管理対象となる無線タグ(030)xは、各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。管理対象となる無線タグ(030)が複数ある場合には、それぞれが各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。
【0026】
ステップ(7)では、各親機(010)A〜Fは、取得した各無線タグの受信信号強度(RSSI)値を特定小電力無線で無線制御装置(040)に通知する。
【0027】
ステップ(8)では、無線制御装置(040)は、各親機(010)A〜Fを制御しながら取得した各無線タグa〜f及びxの受信信号強度(RSSI)値を、ネットワーク経由でデータ処理装置(050)に通知する。
【0028】
ステップ(9)では、データ処理装置(050)は、無線制御装置(040)から取得した各無線タグa〜f及びxの受信信号強度(RSSI)値をDBに格納する。
【0029】
ステップ(10)では、データ処理装置(050)は、無線制御装置(040)から取得した基準無線タグa〜fの受信信号強度(RSSI)値と管理対象となる無線タグxの受信信号強度(RSSI)値から当該無線タグxの位置を推定し、DBへ格納する。
【0030】
ステップ(11)では、表示装置(060)は、Webブラウザより表示したい無線タグ(030)xを指定し、データ処理装置(050)が推定した結果をDBより取得し、指定された管理対象となる無線タグ(030)xの位置を表示する。
【0031】
ステップ(12)では、動作終了が判断される。終了しない場合(N)にはステップ(1)に戻る。
【0032】
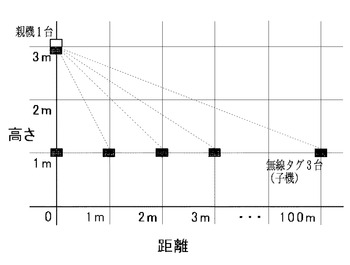
図3には、この発明に用いられる「標準RSSI値・距離曲線」を取得するための親機と子機の説明図が示されている。上記「標準RSSI値・距離曲線」は、より高い精度での位置推定を可能にするために考えられたものであり、親機1台を高さ3m(メートル)の位置に設置し、特に制限されないが、親機には基準無線タグが設けられている。そして、高さ1mに3台の子機を置き、0m(直下)から1m置きに100mまで子機を移動させながら、順次に受信信号強度(RSSI)値を測定する。
【0033】
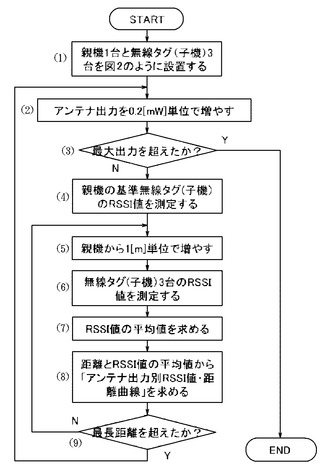
図4には、図3の受信信号強度(RSSI)値を取得する測定方法の一実施例のフローチャート図が示されている。
【0034】
ステップ(1)では、前記図3に示したように親機1台と無線タグ(子機)3台を設置する。
【0035】
ステップ(2)では、アンテナ出力を0.2〔mW〕単位で増やす。つまり、最初は、アンテナ出力が初期値が0.6〔mW〕になるようにされる。
【0036】
ステップ(3)では、アンテナ出力が最大値1.0〔mW〕を超えたかを判定する。このアンテナ出力が最大値1.0〔mW〕を超えて1.2〔mW〕になると測定終了(END)となる。
【0037】
ステップ(4)では、親機に設けられた基準無線タグ(子機)の受信信号強度(RSSI)値を測定する。
【0038】
ステップ(5)では、高さ1mに設けられた無線タグ3台を1〔m〕単位で増やす。
【0039】
ステップ(6)では、無線タグ(子機)3台の受信信号強度(RSSI)値を測定する最初は、親機直下の無線タグ3台の受信信号強度(RSSI)値が測定される。
【0040】
ステップ(7)では、無線タグ(子機)3台の受信信号強度(RSSI)値の平均値を求める。このように3台の子機の平均値を求める理由は、1台の無線タグ(子機)のみで受信信号強度(RSSI)値を測定すると、かかる無線タグの持つ受信感度が製造バラツキの中心値からずれている場合、その影響を大きく受けて位置推定誤差が大きくなる。そこで、「標準RSSI値・距離曲線」を得るために無線タグの持つ受信感度のバラツキを補正するよう前記のように3台の無線タグの平均的な受信信号強度(RSSI)値を求めるようにする。無線タグの数を多くすると、より高い精度で平均的な受信信号強度(RSSI)値を求めることができる。
【0041】
ステップ(7)では、距離とRSSI値の平均値から「アンテナ出力別RSSI値・距離曲線」を求める。つまり、最初は、前記アンテナ出力が0.6〔mW〕で、親機の直下(0m)でのRSSI値の平均値がプロットされる。
【0042】
ステップ(8)では、最長距離を超えたかの判定が行われる。最長距離は例えば100mとされる。100mを超えるまでは、ステップ(5)に戻るので、前記アンテナ出力が0.6〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力0.6〔mW〕でのRSSI値・距離曲線」が求められる。
【0043】
ステップ(8)において、例えば最長距離の100mを超えると、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、0.6〔mW〕から0.8〔mW〕に増加させられる。したがって、ステップ(2)〜(9)により、前記アンテナ出力が0.8〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力0.8〔mW〕でのRSSI値・距離曲線」が求められる。
【0044】
ステップ(8)において、再度最長距離の100mを超えると、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、0.8〔mW〕から1.0〔mW〕に増加させられる。したがって、ステップ(2)〜(9)により、前記アンテナ出力が1.0〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力1.0〔mW〕でのRSSI値・距離曲線」が求められる。
【0045】
そして、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、1.0〔mW〕から1.2〔mW〕に増加させられると、ステップ(3)で最大出力を超えたと判定されて前記のように測定終了となる。
【0046】
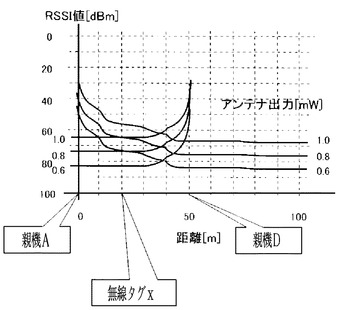
図5には、図3及び図4で説明したアンテナ出力別の「標準RSSI値・距離曲線」が示されている。親機のアンテナ出力を前記のように0.6〔mW〕、0.8〔mW〕、1.0〔mW〕と変化させて、無線タグのRSSI値と親機からの距離を実測したプロットから標準RSSI値・距離曲線が作成される。この標準RSSI値・距離曲線から、各アンテナ出力に対応した補正用の近似式が求められる。この「標準RSSI値・距離曲線」は、既知のデータとし、前記図1のデータ処理装置(050)のデータベース(DB)に格納されている。つまり、前記図1のような管理エリアに適用されることの他、同じ親機と子機を用いた各種システムに標準データベースとして共用される。
【0047】
前記「標準RSSI値・距離曲線」は、無線タグを資産PC(パーソナルコンピュータ)に取り付け、その位置を管理する盗難防止システム、無線タグを介護を必要とする高齢者に付属させ、危険区域への侵入防止や徘徊の防止システム、無線タグを特殊車輌に取り付け、移動範囲を把握・分析する運行管理システム、前記図1のように無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システム、無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システム等のように管理エリアが種々異なる場合でも、前記「標準RSSI値・距離曲線」が用いられる。つまり、親機、子機に対する付属データとして「標準RSSI値・距離曲線」が提供される。前記図5の「標準RSSI値・距離曲線」は、標準的なデータであるので、実際に使用する際には各種システムに適合するよう補正して用いられる。
【0048】
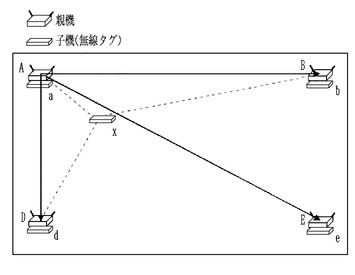
図6には、適用されるシステムに対応した親機と子機の説明図が示されている。同図には、図1のシステムの一部例が示されている。つまり、親機A,B,D,Fと標準無線タグa,b,d,eと管理対象の無線タグxの関係が示されている。
【0049】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び下側の基準無線タグdのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、図7に示した親機A→親機DのRSSI値・距離曲線を求める。つまり、親機Aと親機D(子機d) 間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0050】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び右側の基準無線タグbのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、前記図7と同様な親機A→親機BのRSSI値・距離曲線を求める。つまり、親機Aと親機B(子機b)間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0051】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び右下対向の基準無線タグeのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、前記図7と同様な親機A→親機EのRSSI値・距離曲線を求める。つまり、親機Aと親機E(子機e)間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0052】
以下、順次繰り返して各親機A〜Fと基準無線タグa〜fの実際のRSSI値を求め、各親機から隣り合う親機への前記図7に示したようなアンテナ出力別RSSI値・距離曲線を完成させる。
【0053】
前記図2のステップ(10)において、受信した各基準無線タグa〜f(020)の受信信号強度(RSSI)値は、データ処理装置(050)のデータベースに格納されている前記「標準RSSI値・距離曲線」の近似式で補正を行い、前記のように「RSSI値・距離曲線(親機m→親機n)」が作成される。前記図1のシステムでは親機m→親機nはA〜Fに対応する。データ処理装置(050)では、「RSSI値・距離曲線(親機m→親機n)」の近似式または「RSSI値・距離曲線(親機m→親機n)」より求めた「RSSI値・距離換算テーブル」を用いて、親機(010)からの無線タグ(子機)(030)の距離推定を行う。
【0054】
前記図2のステップ(10)においては、データ処理装置(050)は、知りたい無線タグ(子機)(030)の位置を、前記の親機(010)からの無線タグ(子機)(030)の距離推定処理を最大3点について行うことで可能にする。データ処理装置(050)では、「RSSI値・距離換算テーブル」より求めた対象の無線タグ(子機)(030)の位置を「実測・描画換算テーブル」で図(配置図、地図等)にマッピングして表示装置(060)に送信する。そして、ステップ(11)において、表示装置(060)では、データ処理装置(050)より受信した対象の無線タグ(子機)(030)の位置を表形式または図(配置図、地図等)形式で表示する。
【0055】
図8には、この発明に係る距離位置推定処理を行うRSSI値・距離曲線の説明図が示されている。図6に示した位置に管理対象の無線タグxがある場合、親機A、親機D、親機Bのアンテナ出力が0.6〔mW〕に、無線タグxの位置が親機Aから距離20.0〔m〕でRSSI値74〔dBm〕、親機Dから距離30.0〔m〕でRSSI値82〔dBm〕、図示しないが親機Bから距離36.1〔m〕でRSSI値85〔dBm〕の3点と位置推定されるとき、無線タグxから2番目に近い親機Dのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕に変化させて、通信先を親機Aから親機Dに切り替えることで、無線タグxの位置のRSSI値の「ゆらぎ誤差」を低減させる。
【0056】
図8の場合、親機Dのアンテナ出力が1.0〔mW〕のときに、親機Aから親機Dに切り替わり、親機Dから距離30でRSSI値64〔dBm〕となる。つまり、アンテナ出力を大きくすると、距離に対するRSSI値の変化量が大きくなり、より高い精度での距離判定が可能になる。
【0057】
更に、必要があれば親機Dのアンテナ出力を0.6〔mW〕に戻し、管理対象の無線タグxから3番目に近い親機Bのアンテナ出力を0.6〔mW〕→0.8〔mW〕に変化させて、通信先を親機Aから親機Bに切り替えることで、親機Bからの距離とRSSI値から無線タグxの位置を求める。上記の手順を繰り返すことにより、より正確に管理対象の無線タグxの位置を推定する。
【0058】
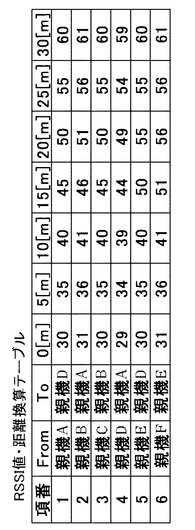
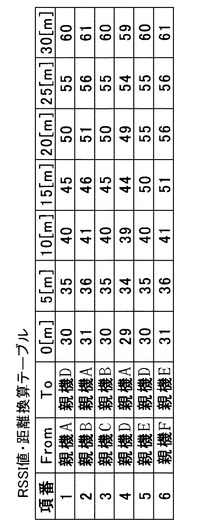
図9には、図2のステップ(10)の追加説明で示した前記「RSSI値・距離換算テーブル」の作成方法の説明図が示されている。親機Aのアンテナ出力を変えながら親機Dの基準無線タグdのRSSI値を測定し、前記提供されている前記図5に示したような「標準RSSI値・距離曲線」を近似式で補正した前記図7に示したような「アンテナ出力別RSSI値・距離曲線(親機A→親機D)」よりRSSI値・距離換算テーブルの項番1を作成する。
【0059】
親機Bのアンテナ出力を変えながら親機Aの基準無線タグaのRSSI値を測定し、前記提供されている前記図5に示したような「標準RSSI値・距離曲線」を近似式で補正した図示しない「アンテナ出力別RSSI値・距離曲線(親機B→親機A)」よりRSSI値・距離換算テーブルの項番2を作成する。以下、順次に繰り返して図9に示したような「RSSI値・距離換算テーブル」を完成させる。
【0060】
図10には、この発明に係る管理対象の無線タグの現在位置表示方法の説明図が示されている。(1)親機A,B,DのRSSI値を各「RSSI値・距離換算テーブル」に基づき、推定距離に換算する。上記3個の親機A,D,Bは、RSSI値が大きな順の上位3個が選ばれる。(2)求めた推定距離をレイアウト図の描画距離に換算する。(3)管理対象の無線タグxの位置を親機A,D,Bの順に各親機A,D,Bから求めた描画距離を用いて破線で円を描く。(4)管理対象の無線タグxの位置推定が親機Aの場合には、親機Aから求めた描画距離を用いて実線で円を描く。
【0061】
親機A,D,Bを中心とする破線で示した円で交わっている場所が無線タグxの位置を示す。この位置は、例えば120秒毎に更新される値とされる。親機Aを中心とする実線で示した円の範囲内に無線タグxは存在することを示す。この円は、例えば10秒毎に更新される値である。無線タグxが移動しない場合及び120秒毎の更新時に親機Aの破線の円と実線の円は一致する。例えば、無線タグxの位置情報は、実線で示した距離A1が12.00mであり、破線で示した親機Aに対応した距離A2が10.00mであり、親機Dに対応した距離Dが20.00mであり、親機Bに対応した距離Bが30.00mである。
【0062】
図11には、この発明に係る管理対象の無線タグの推定距離の換算方法の説明図が示されている。同図は、前記図10に示した無線タグxに対応している。無線タグxに関するアンテナID(識別情報)、RSSI値の組み合わせが下記の場合に推定距離を求める。(a)アンテナID=親機A,RSSI値=40dBm(120秒毎の更新値)
(b)アンテナID=親機D,RSSI値=49dBm(120秒毎の更新値)
(c)アンテナID=親機B,RSSI値=61dBm(120秒毎の更新値)
(d)アンテナID=親機A,RSSI値=62dBm(10秒毎の更新値)
【0063】
(1)上記(a)の場合、図11に示した「RSSI値・距離換算テーブル」の項番1より40dBm→10mと求める。
【0064】
(2)上記(b)の場合、図11に示した「RSSI値・距離換算テーブル」の項番4より49dBm→20mと求める。
【0065】
(2)上記(c)の場合、図11に示した「RSSI値・距離換算テーブル」の項番2より61dBm→30mと求める。
【0066】
(2)上記(d)の場合、図11に示した「RSSI値・距離換算テーブル」の項番1より、下記のような差分から下記のような演算によって42dBm→12mと求める。
【0067】
(1) 40dBm<42dBm<45dBm→10m<Xm<15m
(2)(42−40):(45−40)=(X−10):(15−10)
(3) 2:5=(X−10):5→10=5X−50→60=5X→X=12
【0068】
図12には、表示画面の描画距離の換算方法の一実施例の説明図が示されている。図12に示された管理区域の実測距離は、同図の文字の向きに沿って左側を上側にすると、左上部を原点(0,0)とし、前記親機Aは(20,19)の位置、つまり、原点(0,0)からX方向(横右方向)に20.0m、Y方向(縦下方向)に19.0mに設置されている。以下同様に、親機Bは親機AからX方向に31.0m離れた(51,19)に設置され、親機Cは親機BからX方向に31.0m離れた(82,19)に設置される。親機Dは親機AからY方向に22.0m離れた(20,41)に設置され、親機Eは親機DからX方向に31.0m離れた(51,41)に設置され、親機Fは親機EからX方向に31.0m離れた(82,41)に設置される。
【0069】
表示画面上には、管理区域序実測距離に対して1/1000に縮尺されて表示される。つまり、1mは0.001の1mmとして表示される。表示画面上には、親機Aは、原点(0,0)とすると(20,19)に表示され、以下同様に、親機Bは(51,19)に表示され、親機Cは(82,19)に表示される。親機Dは親機AからY方向に22離れた(20,41)に表示され、親機Eは(51,41)に表示され、親機Fは(82,41)に表示される。そして、親機Aの座標(20,19)を中心として、破線で示した前記半径10の円が描かれ、実線で示した半径12(mm)の円が描かれる。親機Dの(20,41)を中心として、破線で示した前記半径20(mm)の円が描かれ、親機Bの(51,19)を中心として、破線で示した前記半径30(mm)の円が描かれる。
【0070】
図13は、無線タグの位置推定方法の一実施例の説明図が示されている。無線タグx,y,zが同図のようにアンテナ(親機)の設置位置(アンテナID:No1,No2,No3,No4,No5)と、RSSI値(a,b,c,d,e,f)が分かる場合、その位置推定(X,Y座標)を求める方法は、以下の通りである。なお、各アンテナの設置位置の実測・描画換算テーブルが同図のように作成されている。
【0071】
aは無線アンテナ(アンテナID:No1)から無線タグxまでのRSSI値(距離換算値)であり、bは無線アンテナ(アンテナID:No2)から無線タグxまでのRSSI値(距離換算値)であり、cは無線アンテナ(アンテナID:No3)から無線タグxまでのRSSI値(距離換算値)である。dは無線アンテナ(アンテナID:No4)から無線タグyまでのRSSI値(距離換算値)であり、eは無線アンテナ(アンテナID:No5)から無線タグyまでのRSSI値(距離換算値)である。そして、fは無線アンテナ(アンテナID:No4)から無線タグzまでのRSSI値(距離換算値)である。Aは無線アンテナ間(アンテナID:No1からNo2)の距離であり、Bは無線アンテナ間(アンテナID:No2からNo3)の距離であり、Cは無線アンテナ間(アンテナID:No1からNo3)の距離であり、Dは無線アンテナ間(アンテナID:No4からNo5)の距離である。
【0072】
無線タグxは、例えば3点測定により位置推定される。RSSI値(a,b,c)及び設置位置(アンテナID:No1,No2,No3)より大小関係を求める。
a≦b≦cの場合、
A≦B≦Cの場合(既知の値)
a≦b≦C
a≦A≦b
B≦b≦b
a,b,c及びA,B,Cの大小関係をその都度求めながら次の3平方の定理により座標位置を推定する。
【0073】
(A×A)+(B×B)=(C×C)(既知の値)
(1)最も小さいaについて仮の換算値を決め、次に大きいbを求める。
(a×a)+(A×A)=(b×b)
(2)最も大きいcを求める。
(B×B)+(b×b)=(c×c)
(3)最も小さいaを求める(確認処理)。
(a×a)+(C×C)=(c×c)
【0074】
(4)上記(1)の換算値aと(3)で求めた値aが等しくなるまで(1)から(4)を繰り返す。
1)「(1)の換算値a>(3)で求めた値a」の場合、差の1/2を(1)の換算値aより減算する。
2)「(1)の換算値a<(3)で求めた値a」の場合、差の1/2を(1)の換算値aを加算する。そして、アンテナID:No4,No5のRSSI値が無いことにより、上記のように求めたa,b,cの値により、無線タグxのX座標,Y座標を決定し位置を推定する。
【0075】
無線タグyは、例えば2点測定により位置推定される。
(1)換算値の精度に依存した位置となる。
d≦eの場合
Dは既知の値
d≦e≦D
最も小さいdについて換算値を決め、次に大きいeを求める。
(e×e)=(D×D)+(d×d)
【0076】
アンテナID:No1,No2,No3のRSSI値が無いことにより、上記のように求めたd,e K値より、無線タグyのX座標,Y座標を決定し、位置を推定する。その場合、アンテナの設置条件(位置)により、ある程度の方向を決定する。
【0077】
無線タグzは、例えば1点測定により位置推定される。
(1)アンテナの位置から換算値の同心円の範囲内となる。
(2)アンテナID:No1,No2,No3,No5のRSSI値が無いことにより、換算したfの値より、無産タグzのX座標,Y座標を決定し、位置を推定する。その場合、アンテナの設置条件(位置)により、ある程度の方向を決定する。
【0078】
図14には、この発明に係る無線位置検出システムの他の一実施例のブロック図が示されている。この実施例では、より高い精度の位置推定を可能にするために前記X方向に関しては、基準タグaとbの中点部に基準タグgが追加され、基準タグbとcの中点部に基準タグhが追加される。同様に、基準タグdとeの中点部に基準タグoが追加され、基準タグeとfの中点部に基準タグpが追加される。前記Y方向に関しても同様に基準タグaとdの中点部に基準タグiが追加され、追加された基準タグgとoの中点部に基準タグjが追加される。基準タグbとeの中点部に基準タグkが追加され、追加された基準タグhとpの中点部に基準タグlが追加され、基準タグcとfの中点部に基準タグmが追加される。このような追加基準タグg〜pのRSSI値も位置推定に利用できるため、高い感度領域でのRSSI値・距離曲線を使用できるのでより高い精度での管理対象となる無線タグxの位置推定が可能になる。
【0079】
図15には、この発明に係る無線位置検出システムの更に他の一実施例のブロック図が示されている。この実施例では、より高い精度の位置推定を可能にするために前記X方向に関しては、親機AとBの中点部に親機Gが追加され、親機BとCの中点部に親機Hが追加される。同様に、親機DとEの中点部に親機Iが追加され、親機EとFの中点部に親機Jが追加される。このような親機G〜Jからのアンテナ出力に対応して基準タグa〜fのRSSI値、及び管理対象となる無線タグxにおいても上記追加された親機G〜Jからのアンテナ出力に対応したRSSI値が利用できるので、高い感度領域でのRSSI値・距離曲線を使用できるので無線タグxの位置推定がより高い精度で推定可能になる。
【0080】
管理対象のアクティブ型無線タグは、引き剥がしや電波が届かなくなった場合にブザーが鳴り、あるいはLED(発光ダイオード)が点滅させるような機能を付加してもよい。この機能を付加する場合、予め無効(ブザーを停止、あるいはLEDの点滅を停止)にできるようにしてもよい。また、電池残量がしきい値レベル1(電池交換時期)、しきい値レベル2(交換しないと正しく動作でいない)に達した場合に親機(無線アンテナ)に通知するような機能を付加することが望ましい。更に、管理対象の無線タグは、不正持ち出しや盗難が発生した場合、コマンド制御でブザーを鳴らしたり、止めたりあるいはLEDを点滅させたり、止めたりすることができるようにしてもよい。
【0081】
本発明者によってなされた発明を、前記実施形態に基づき具体的に説明したが、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能である。例えば、前記図14や図15のように親機と基準タグの数は、同一である必要はない。そして、その相対的な位置関係も任意でよい。前記親機の基準タグの位置情報及び基準タグのRSSI値を参照して、管理対象となる無線タグの位置を推定する方法は、前記の他に種々の変形例を採ることができる。親機及び子機を制御する構成は、前記無線制御装置、データ処理装置、記憶装置の機能を実現するものであれば何であってもよい。前記実施例は、アクティブ型無線タグ(子機)を買い物カゴに取り付け、小売店における顧客の販売行動(店内の動線、長時間滞在場所、多く集まる場所等)を把握可能な動態管理・分析システムにも利用することができる。
【産業上の利用可能性】
【0082】
この発明は、アクティブ型の無線タグの無線位置検出システムと無線位置検出方法として広く利用することができる。
【符号の説明】
【0083】
A〜J…親機(無線アンテナ)、a〜p…子機(基準無線タグ),x〜z…管理対象の無線タグ、010…親機(無線アンテナ)、020…子機(基準無線タグ)、030…管理対象の子機(無線タグ)、040…無線制御装置、050…データ処理装置、DB…記憶装置(データベース)、060…表示装置。
【技術分野】
【0001】
この発明は、無線位置検出システムと無線位置検出方法に関し、例えば移動を前提としたアクティブ型無線タグの位置を正確に、かつ簡単に推定するシステムと方法に利用して有効な技術に関するものである。
【背景技術】
【0002】
特開2007−043587号公報には、移動可能な端末と、該端末からの接続を許容する複数の基地局と、上記端末および基地局からの信号を受信する複数の無線受信局とからなる無線位置検出システムを屋内等で運用する際に、該端末の位置検出誤差を低減する方法とシステムの実現に向けて、端末の位置検出の地理的範囲を示す複数の位置検出エリアの定義と、上記各位置検出エリアにおいて端末の位置を検出するために該各エリアに割り当てた予め位置が既知である複数の無線受信局を、特定するための定義とに基づいて、各無線受信局が受信した端末からの無線信号に関する測定結果を、上記位置検出エリア毎に評価し、該端末の位置を決定することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−043587号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明者においては、アクティブ型無線タグ(子機)を資産(パソコン等)に取り付け、その位置を管理する盗難防止システム、上記無線タグを特殊車輌等に取り付け、移動範囲を把握・分析する運行管理システム、上記無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システム、あるいは上記無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システム等を検討した。
【0005】
前記特許文献1に記載の位置検出技術を利用して前記各システムを実効あるものにするためには、上記無線タグの位置をより正確に把握する必要があり、事前に無線タグの受信信号強度(RSSI)値とアンテナ親機との距離の対応関係を、より正確に実測することにより求める必要がある。しかし、そのためには、多くの工数を必要とし、かつ、レイアウト変更等でRSSI値が変化した場合には、それまでの実測値は不適切な値となるため、レイアウト変更等の度に再度実測し直す必要がある。
【0006】
この発明の目的は、現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする無線位置検出システムと無線位置検出方法を提供することにある。この発明の前記ならびにそのほかの目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0007】
本願において開示される1つの実施例は、以下の通りである。無線位置検出システムは、監視エリアにおける特定の位置に分散して配置された複数の親機と、上記監視エリアにおける特定の位置に分散して配置され、基準となる複数の第1無線タグと、移動体に取り付けられ、上記第1無線タグと同じ性能を持つように製造された第2無線タグと、上記複数の親機に対して無線信号の授受を行う無線制御装置と、データ処理装置とを有する。上記データ処理装置は、上記無線制御装置を制御して上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記監視エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する。
【0008】
本願において開示される他の1つの実施例は、以下の通りである。無線位置検出方法として、監視エリアにおける特定の位置に分散して複数の親機を配置し、上記監視エリアにおける特定の位置に分散して基準となる複数の第1無線タグを配置し、位置監視すべき移動体に上記第1無線タグと同じ性能を持つように製造された第2無線タグを取り付ける。上記複数の親機に対して無線信号の授受を行う無線制御装置とそれを制御するデータ処理装置とを用い、上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記監視エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する。
【発明の効果】
【0009】
親機と基準となる無線タグの設置により相対的な位置関係及び受信電界強度データを利用することにより、現場での調整・設置に要する工数を低減し、容易に管理対象の無線タグの位置を推定可能となる。無線タグの位置が把握可能になるため、その無線タグを取り付けた対象物(人、物)の移動やその範囲、現在位置等を管理するシステムを構築することができる。
【図面の簡単な説明】
【0010】
【図1】この発明に係る無線位置検出システムの一実施例のブロック図である。
【図2】図1の無線位置検出システムの動作の一実施例のフローチャート図である。
【図3】この発明に用いられる「標準RSSI値・距離曲線」を取得するための親機と子機の説明図である。
【図4】図3の受信信号強度(RSSI)値を取得する測定方法の一実施例のフローチャート図である。
【図5】図3及び図4で説明したアンテナ出力別の「標準RSSI値・距離曲線」図である。
【図6】この発明が適用されるシステムに対応した親機と子機の説明図である。
【図7】図6の親機A→親機DのRSSI値・距離曲線図である。
【図8】この発明に係る距離位置推定処理を行うRSSI値・距離曲線の説明図である。
【図9】図2のステップ(10)の追加説明で示した前記「RSSI値・距離換算テーブル」の作成方法の説明図である。
【図10】この発明に係る管理対象の無線タグの現在位置表示方法の説明図である。
【図11】この発明に係る管理対象の無線タグの推定距離の換算方法の説明図である。
【図12】表示画面の描画距離の換算方法の一実施例の説明図である。
【図13】管理対象の無線タグの位置推定方法の一実施例の説明図である。
【図14】この発明に係る無線位置検出システムの他の一実施例のブロック図である。
【図15】この発明に係る無線位置検出システムの更に他の一実施例のブロック図である。
【発明を実施するための形態】
【0011】
添付の図面に沿って、この発明の好ましい実施の形態について詳細に説明する。
【実施例】
【0012】
図1には、この発明に係る無線位置検出システムの一実施例のブロック図が示されている。この実施例は、例えば無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システムあるいは上記無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システムに向けられている。倉庫あるいはセキュリティ区域等のような管理エリアには、複数のキャビネットが設置されている。また、この実施例の管理エリアには、ロッカーや出入口や建物の柱が設けられているものとする。
【0013】
上記管理エリアには、複数の親機(基地局)と、基準となる無線タグ(子機)とが固定的に設置される。複数の親機は、代表として親機(010)が例示され、基準となる複数の無線タグは、代表として無線タグ(020)が例示されている。上記管理エリアには、特に制限されないが、3×2個のキャビネット組が出入口から奥に向かって2列に並んで6組が配置されている。3×2個の各キャビネット組の間は通路が設けられている。
【0014】
親機は、例示されている親機(010)のように3×2個のキャビネット組の中央部に1個が配置され、管理エリア全体では合計で6個の親機が各キャビネット組に設置される。つまり、親機(010)をAとして、親機AないしCと、親機DないしFとが前記2列に並んだ3×2個のキャビネット組に対応して配置されている。各親機A〜Fは、特に制限されないが、倉庫あるいはセキュリティ区域の天井部に配置され、親機A(010)〜Fのそれぞれの真下の位置に1個ずつの子機としての無線タグa(020)〜fが基準となる無線タグとして前記同様に管理エリア全体では合計で6個が固定的に配置されている。これに対して、例示されている無線タグ(030)は、無線タグxとして管理対象となる対象物(固定資産や人等)である移動体に取り付けられる。
【0015】
前記各親機A〜Fは、各子機(無線タグ)a〜fとxとの間で無線LANで通信をする無線アンテナの基地局である。無線制御装置(040)は、また無線LANを用いて、各無線親機(010)等を制御すると共に、各子機a〜fとxの位置情報(アンテナID、RSSI値、子機区分等)を収集する。データ処理装置(050)は各子機a〜fとxから無線制御装置(040)経由で送られてきたデータを記憶装置DBに格納すると共に処理をし、各管理対象の無線タグxの位置を推定する。表示装置(060)は、無線タグxの現在位置やその履歴を図や表で表示する。無線制御装置(040)、データ処理装置(050)および表示装置(060)はネットワークで接続されており、相互にテータ通信が可能である。
【0016】
基準となる無線タグa〜f(020)と管理対象となる対象物に取り付けられる無線タグx(030)は同一の性能を持った製品であり、基準となる無線タグa〜f(020)は固定的に取り付けられるが、無線タグx(030)は管理対象となる対象物(固定資産や人等)となる移動体に取り付けられるという役割を異にするだけであり、子機区分で使い分けられる。
【0017】
各親機A〜Fの位置情報は管理エリア内に設置をする際に、管理エリア内での距離の実測を行う。つまり、管理エリア内での各親機A〜Fの位置情報は既知のものとしてデータベースに格納されている。無線制御装置(040)では、各親機A〜F(010)と対で設置した各基準となる無線タグa〜f(020)の受信信号強度(RSSI)値を順次測定し、データ処理装置(050)にデータを送信する。つまり、一定の時間間隔で各基準となる無線タグa〜f(020)の受信信号強度(RSSI)値がいわばリアルタイムで最新のものが取得されている。知りたい無線タグx(030)の各親機A〜Fに対する受信信号強度(RSSI)値を、各親機A〜Fに対する各基準となる無線タグa〜f(020)との間のA〜Fとの間の受信信号強度(RSSI)値を参照して、各親機A〜F(子機a〜f)の管理エリア内の位置情報から、知りたい無線タグx(030)が存在する管理エリア内の位置を推定する。
【0018】
最も判りやすい例は、基準となる無線タグaと実質的に同じ位置に無線タグxがあるときには、無線タグaおける各親機A〜Fからの受信信号強度(RSSI)値と無線タグxおける各親機A〜Fからの受信信号強度(RSSI)値とが同じになるので、無線タグxは、基準の無線タグaと同じ場所、つまり、親機Aの真下に存在することが判る。前記基準となる無線タグa〜f(020)の受信信号強度(RSSI)値がいわばリアルタイムで最新のものが取得されているので、管理エリア内のレイアウト変更やロッカーの追加や位置変更等により、それに対応した無線タグa〜f(020)の受信信号強度(RSSI)値が基準となるので、このようなレイアウト変更等による受信状態の変更にも柔軟に対応することができる。
【0019】
例えば、基準となる無線タグ及び管理対象物に取り付けられた無線タグは、後述する3点測定のために、一定間隔(デフォルト:2分)で全無線アンテナの親機と通信を行い、各無線タグに対応した最も強い受信信号強度の無線アンテナの親機を検知して3点切り替え情報を通信する。コマンド制御により、この通信時間は20秒、1分、2分、3分、5分に制御できる。そして、前記各無線タグは、一定間隔(デフォルト:10秒)で存在確認情報をそれぞれに対応した3つの無線アンテナの親機と通信を行う。コマンド制御により通信時間は、1秒、10秒、20秒、30秒、1分のように制御できるようにされる。これらの時間間隔は、システム構成や無線タグの電池寿命等を考慮して設定される。
【0020】
実際には、図1のように知りたい無線タグx(030)の位置は任意であり、基準となる無線タグa〜fの中間部に存在することが多い。この場合には、基準となる無線タグa〜fにおける各親機A〜Fからの受信信号強度(RSSI)値から距離と電界強度の関係を推定して無線タグxの位置を推定することができる。
【0021】
図2には、図1の無線位置検出システムの動作の一実施例のフローチャート図が示されている。
【0022】
ステップ(1)では、アンテナ出力変更かが判断される。変更する場合(Y)にはステップ(3)で各親機(010)A〜Fのアンテナ出力を特定小電力無線で無線制御装置(040)から制御してステップ(2)に移行する。変更しない場合(N)にはステップ(2)に移行する。
【0023】
ステップ(2)では、無線タグ動作変更かが判断される。変更する場合(Y)にはステップ(4)で各無線タグ(020)a〜f,(030)xの動作を特定小電力無線で無線制御装置(040)から制御してステップ(5)に移行する。変更しない場合(N)にはステップ(5)に移行する。このようなステップ(1)ないし(4)により、ステップ(5)以降で行われる位置特定のための親機及び子機の無線LANで通信をする際の動作条件設定が行われる。
【0024】
ステップ(5)では、各基準無線タグ(020)a〜fは、それぞれが各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。
【0025】
ステップ(6)では、管理対象となる無線タグ(030)xは、各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。管理対象となる無線タグ(030)が複数ある場合には、それぞれが各親機A〜Fに対して受信信号強度(RSSI)値を特定小電力無線で通知する。
【0026】
ステップ(7)では、各親機(010)A〜Fは、取得した各無線タグの受信信号強度(RSSI)値を特定小電力無線で無線制御装置(040)に通知する。
【0027】
ステップ(8)では、無線制御装置(040)は、各親機(010)A〜Fを制御しながら取得した各無線タグa〜f及びxの受信信号強度(RSSI)値を、ネットワーク経由でデータ処理装置(050)に通知する。
【0028】
ステップ(9)では、データ処理装置(050)は、無線制御装置(040)から取得した各無線タグa〜f及びxの受信信号強度(RSSI)値をDBに格納する。
【0029】
ステップ(10)では、データ処理装置(050)は、無線制御装置(040)から取得した基準無線タグa〜fの受信信号強度(RSSI)値と管理対象となる無線タグxの受信信号強度(RSSI)値から当該無線タグxの位置を推定し、DBへ格納する。
【0030】
ステップ(11)では、表示装置(060)は、Webブラウザより表示したい無線タグ(030)xを指定し、データ処理装置(050)が推定した結果をDBより取得し、指定された管理対象となる無線タグ(030)xの位置を表示する。
【0031】
ステップ(12)では、動作終了が判断される。終了しない場合(N)にはステップ(1)に戻る。
【0032】
図3には、この発明に用いられる「標準RSSI値・距離曲線」を取得するための親機と子機の説明図が示されている。上記「標準RSSI値・距離曲線」は、より高い精度での位置推定を可能にするために考えられたものであり、親機1台を高さ3m(メートル)の位置に設置し、特に制限されないが、親機には基準無線タグが設けられている。そして、高さ1mに3台の子機を置き、0m(直下)から1m置きに100mまで子機を移動させながら、順次に受信信号強度(RSSI)値を測定する。
【0033】
図4には、図3の受信信号強度(RSSI)値を取得する測定方法の一実施例のフローチャート図が示されている。
【0034】
ステップ(1)では、前記図3に示したように親機1台と無線タグ(子機)3台を設置する。
【0035】
ステップ(2)では、アンテナ出力を0.2〔mW〕単位で増やす。つまり、最初は、アンテナ出力が初期値が0.6〔mW〕になるようにされる。
【0036】
ステップ(3)では、アンテナ出力が最大値1.0〔mW〕を超えたかを判定する。このアンテナ出力が最大値1.0〔mW〕を超えて1.2〔mW〕になると測定終了(END)となる。
【0037】
ステップ(4)では、親機に設けられた基準無線タグ(子機)の受信信号強度(RSSI)値を測定する。
【0038】
ステップ(5)では、高さ1mに設けられた無線タグ3台を1〔m〕単位で増やす。
【0039】
ステップ(6)では、無線タグ(子機)3台の受信信号強度(RSSI)値を測定する最初は、親機直下の無線タグ3台の受信信号強度(RSSI)値が測定される。
【0040】
ステップ(7)では、無線タグ(子機)3台の受信信号強度(RSSI)値の平均値を求める。このように3台の子機の平均値を求める理由は、1台の無線タグ(子機)のみで受信信号強度(RSSI)値を測定すると、かかる無線タグの持つ受信感度が製造バラツキの中心値からずれている場合、その影響を大きく受けて位置推定誤差が大きくなる。そこで、「標準RSSI値・距離曲線」を得るために無線タグの持つ受信感度のバラツキを補正するよう前記のように3台の無線タグの平均的な受信信号強度(RSSI)値を求めるようにする。無線タグの数を多くすると、より高い精度で平均的な受信信号強度(RSSI)値を求めることができる。
【0041】
ステップ(7)では、距離とRSSI値の平均値から「アンテナ出力別RSSI値・距離曲線」を求める。つまり、最初は、前記アンテナ出力が0.6〔mW〕で、親機の直下(0m)でのRSSI値の平均値がプロットされる。
【0042】
ステップ(8)では、最長距離を超えたかの判定が行われる。最長距離は例えば100mとされる。100mを超えるまでは、ステップ(5)に戻るので、前記アンテナ出力が0.6〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力0.6〔mW〕でのRSSI値・距離曲線」が求められる。
【0043】
ステップ(8)において、例えば最長距離の100mを超えると、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、0.6〔mW〕から0.8〔mW〕に増加させられる。したがって、ステップ(2)〜(9)により、前記アンテナ出力が0.8〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力0.8〔mW〕でのRSSI値・距離曲線」が求められる。
【0044】
ステップ(8)において、再度最長距離の100mを超えると、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、0.8〔mW〕から1.0〔mW〕に増加させられる。したがって、ステップ(2)〜(9)により、前記アンテナ出力が1.0〔mW〕のときの前記親機直下0mから1mずつ3台の無線タグの平均値としての受信信号強度(RSSI)値が取得されてプロットされるので「アンテナ出力1.0〔mW〕でのRSSI値・距離曲線」が求められる。
【0045】
そして、ステップ(2)に戻り、アンテナ出力が前記のように0.2〔mW〕単位で増されるので、1.0〔mW〕から1.2〔mW〕に増加させられると、ステップ(3)で最大出力を超えたと判定されて前記のように測定終了となる。
【0046】
図5には、図3及び図4で説明したアンテナ出力別の「標準RSSI値・距離曲線」が示されている。親機のアンテナ出力を前記のように0.6〔mW〕、0.8〔mW〕、1.0〔mW〕と変化させて、無線タグのRSSI値と親機からの距離を実測したプロットから標準RSSI値・距離曲線が作成される。この標準RSSI値・距離曲線から、各アンテナ出力に対応した補正用の近似式が求められる。この「標準RSSI値・距離曲線」は、既知のデータとし、前記図1のデータ処理装置(050)のデータベース(DB)に格納されている。つまり、前記図1のような管理エリアに適用されることの他、同じ親機と子機を用いた各種システムに標準データベースとして共用される。
【0047】
前記「標準RSSI値・距離曲線」は、無線タグを資産PC(パーソナルコンピュータ)に取り付け、その位置を管理する盗難防止システム、無線タグを介護を必要とする高齢者に付属させ、危険区域への侵入防止や徘徊の防止システム、無線タグを特殊車輌に取り付け、移動範囲を把握・分析する運行管理システム、前記図1のように無線タグを固定資産や小額固定資産に取り付け、現在位置を把握可能な現品の棚卸管理システム、無線タグを要員に所持させ、セキュリティ区域へ出入り実績やどの場所に長時間滞在したのかが把握可能な入退室管理システム等のように管理エリアが種々異なる場合でも、前記「標準RSSI値・距離曲線」が用いられる。つまり、親機、子機に対する付属データとして「標準RSSI値・距離曲線」が提供される。前記図5の「標準RSSI値・距離曲線」は、標準的なデータであるので、実際に使用する際には各種システムに適合するよう補正して用いられる。
【0048】
図6には、適用されるシステムに対応した親機と子機の説明図が示されている。同図には、図1のシステムの一部例が示されている。つまり、親機A,B,D,Fと標準無線タグa,b,d,eと管理対象の無線タグxの関係が示されている。
【0049】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び下側の基準無線タグdのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、図7に示した親機A→親機DのRSSI値・距離曲線を求める。つまり、親機Aと親機D(子機d) 間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0050】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び右側の基準無線タグbのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、前記図7と同様な親機A→親機BのRSSI値・距離曲線を求める。つまり、親機Aと親機B(子機b)間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0051】
親機Aのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕のように変化させて親機Aと基準無線タグa及び右下対向の基準無線タグeのRSSI値を測定し、前記提供されている「標準RSSI値・距離曲線」の近似値で補正し、前記図7と同様な親機A→親機EのRSSI値・距離曲線を求める。つまり、親機Aと親機E(子機e)間の距離は既知であるので、「標準RSSI値・距離曲線」の該当する距離におけるRSSI値と、上記測定されたRSSI値との差分に対応して、前記「標準RSSI値・距離曲線」を修正する。
【0052】
以下、順次繰り返して各親機A〜Fと基準無線タグa〜fの実際のRSSI値を求め、各親機から隣り合う親機への前記図7に示したようなアンテナ出力別RSSI値・距離曲線を完成させる。
【0053】
前記図2のステップ(10)において、受信した各基準無線タグa〜f(020)の受信信号強度(RSSI)値は、データ処理装置(050)のデータベースに格納されている前記「標準RSSI値・距離曲線」の近似式で補正を行い、前記のように「RSSI値・距離曲線(親機m→親機n)」が作成される。前記図1のシステムでは親機m→親機nはA〜Fに対応する。データ処理装置(050)では、「RSSI値・距離曲線(親機m→親機n)」の近似式または「RSSI値・距離曲線(親機m→親機n)」より求めた「RSSI値・距離換算テーブル」を用いて、親機(010)からの無線タグ(子機)(030)の距離推定を行う。
【0054】
前記図2のステップ(10)においては、データ処理装置(050)は、知りたい無線タグ(子機)(030)の位置を、前記の親機(010)からの無線タグ(子機)(030)の距離推定処理を最大3点について行うことで可能にする。データ処理装置(050)では、「RSSI値・距離換算テーブル」より求めた対象の無線タグ(子機)(030)の位置を「実測・描画換算テーブル」で図(配置図、地図等)にマッピングして表示装置(060)に送信する。そして、ステップ(11)において、表示装置(060)では、データ処理装置(050)より受信した対象の無線タグ(子機)(030)の位置を表形式または図(配置図、地図等)形式で表示する。
【0055】
図8には、この発明に係る距離位置推定処理を行うRSSI値・距離曲線の説明図が示されている。図6に示した位置に管理対象の無線タグxがある場合、親機A、親機D、親機Bのアンテナ出力が0.6〔mW〕に、無線タグxの位置が親機Aから距離20.0〔m〕でRSSI値74〔dBm〕、親機Dから距離30.0〔m〕でRSSI値82〔dBm〕、図示しないが親機Bから距離36.1〔m〕でRSSI値85〔dBm〕の3点と位置推定されるとき、無線タグxから2番目に近い親機Dのアンテナ出力を0.6〔mW〕→0.8〔mW〕→1.0〔mW〕に変化させて、通信先を親機Aから親機Dに切り替えることで、無線タグxの位置のRSSI値の「ゆらぎ誤差」を低減させる。
【0056】
図8の場合、親機Dのアンテナ出力が1.0〔mW〕のときに、親機Aから親機Dに切り替わり、親機Dから距離30でRSSI値64〔dBm〕となる。つまり、アンテナ出力を大きくすると、距離に対するRSSI値の変化量が大きくなり、より高い精度での距離判定が可能になる。
【0057】
更に、必要があれば親機Dのアンテナ出力を0.6〔mW〕に戻し、管理対象の無線タグxから3番目に近い親機Bのアンテナ出力を0.6〔mW〕→0.8〔mW〕に変化させて、通信先を親機Aから親機Bに切り替えることで、親機Bからの距離とRSSI値から無線タグxの位置を求める。上記の手順を繰り返すことにより、より正確に管理対象の無線タグxの位置を推定する。
【0058】
図9には、図2のステップ(10)の追加説明で示した前記「RSSI値・距離換算テーブル」の作成方法の説明図が示されている。親機Aのアンテナ出力を変えながら親機Dの基準無線タグdのRSSI値を測定し、前記提供されている前記図5に示したような「標準RSSI値・距離曲線」を近似式で補正した前記図7に示したような「アンテナ出力別RSSI値・距離曲線(親機A→親機D)」よりRSSI値・距離換算テーブルの項番1を作成する。
【0059】
親機Bのアンテナ出力を変えながら親機Aの基準無線タグaのRSSI値を測定し、前記提供されている前記図5に示したような「標準RSSI値・距離曲線」を近似式で補正した図示しない「アンテナ出力別RSSI値・距離曲線(親機B→親機A)」よりRSSI値・距離換算テーブルの項番2を作成する。以下、順次に繰り返して図9に示したような「RSSI値・距離換算テーブル」を完成させる。
【0060】
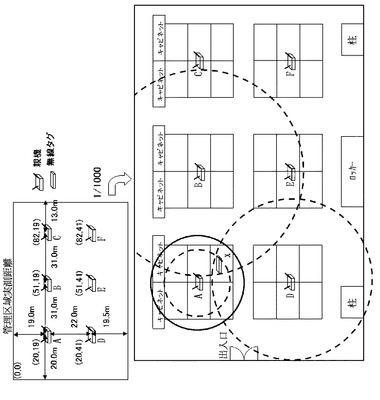
図10には、この発明に係る管理対象の無線タグの現在位置表示方法の説明図が示されている。(1)親機A,B,DのRSSI値を各「RSSI値・距離換算テーブル」に基づき、推定距離に換算する。上記3個の親機A,D,Bは、RSSI値が大きな順の上位3個が選ばれる。(2)求めた推定距離をレイアウト図の描画距離に換算する。(3)管理対象の無線タグxの位置を親機A,D,Bの順に各親機A,D,Bから求めた描画距離を用いて破線で円を描く。(4)管理対象の無線タグxの位置推定が親機Aの場合には、親機Aから求めた描画距離を用いて実線で円を描く。
【0061】
親機A,D,Bを中心とする破線で示した円で交わっている場所が無線タグxの位置を示す。この位置は、例えば120秒毎に更新される値とされる。親機Aを中心とする実線で示した円の範囲内に無線タグxは存在することを示す。この円は、例えば10秒毎に更新される値である。無線タグxが移動しない場合及び120秒毎の更新時に親機Aの破線の円と実線の円は一致する。例えば、無線タグxの位置情報は、実線で示した距離A1が12.00mであり、破線で示した親機Aに対応した距離A2が10.00mであり、親機Dに対応した距離Dが20.00mであり、親機Bに対応した距離Bが30.00mである。
【0062】
図11には、この発明に係る管理対象の無線タグの推定距離の換算方法の説明図が示されている。同図は、前記図10に示した無線タグxに対応している。無線タグxに関するアンテナID(識別情報)、RSSI値の組み合わせが下記の場合に推定距離を求める。(a)アンテナID=親機A,RSSI値=40dBm(120秒毎の更新値)
(b)アンテナID=親機D,RSSI値=49dBm(120秒毎の更新値)
(c)アンテナID=親機B,RSSI値=61dBm(120秒毎の更新値)
(d)アンテナID=親機A,RSSI値=62dBm(10秒毎の更新値)
【0063】
(1)上記(a)の場合、図11に示した「RSSI値・距離換算テーブル」の項番1より40dBm→10mと求める。
【0064】
(2)上記(b)の場合、図11に示した「RSSI値・距離換算テーブル」の項番4より49dBm→20mと求める。
【0065】
(2)上記(c)の場合、図11に示した「RSSI値・距離換算テーブル」の項番2より61dBm→30mと求める。
【0066】
(2)上記(d)の場合、図11に示した「RSSI値・距離換算テーブル」の項番1より、下記のような差分から下記のような演算によって42dBm→12mと求める。
【0067】
(1) 40dBm<42dBm<45dBm→10m<Xm<15m
(2)(42−40):(45−40)=(X−10):(15−10)
(3) 2:5=(X−10):5→10=5X−50→60=5X→X=12
【0068】
図12には、表示画面の描画距離の換算方法の一実施例の説明図が示されている。図12に示された管理区域の実測距離は、同図の文字の向きに沿って左側を上側にすると、左上部を原点(0,0)とし、前記親機Aは(20,19)の位置、つまり、原点(0,0)からX方向(横右方向)に20.0m、Y方向(縦下方向)に19.0mに設置されている。以下同様に、親機Bは親機AからX方向に31.0m離れた(51,19)に設置され、親機Cは親機BからX方向に31.0m離れた(82,19)に設置される。親機Dは親機AからY方向に22.0m離れた(20,41)に設置され、親機Eは親機DからX方向に31.0m離れた(51,41)に設置され、親機Fは親機EからX方向に31.0m離れた(82,41)に設置される。
【0069】
表示画面上には、管理区域序実測距離に対して1/1000に縮尺されて表示される。つまり、1mは0.001の1mmとして表示される。表示画面上には、親機Aは、原点(0,0)とすると(20,19)に表示され、以下同様に、親機Bは(51,19)に表示され、親機Cは(82,19)に表示される。親機Dは親機AからY方向に22離れた(20,41)に表示され、親機Eは(51,41)に表示され、親機Fは(82,41)に表示される。そして、親機Aの座標(20,19)を中心として、破線で示した前記半径10の円が描かれ、実線で示した半径12(mm)の円が描かれる。親機Dの(20,41)を中心として、破線で示した前記半径20(mm)の円が描かれ、親機Bの(51,19)を中心として、破線で示した前記半径30(mm)の円が描かれる。
【0070】
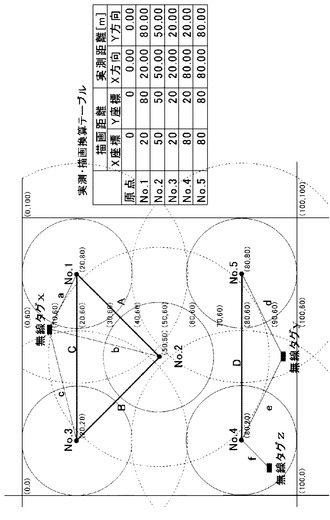
図13は、無線タグの位置推定方法の一実施例の説明図が示されている。無線タグx,y,zが同図のようにアンテナ(親機)の設置位置(アンテナID:No1,No2,No3,No4,No5)と、RSSI値(a,b,c,d,e,f)が分かる場合、その位置推定(X,Y座標)を求める方法は、以下の通りである。なお、各アンテナの設置位置の実測・描画換算テーブルが同図のように作成されている。
【0071】
aは無線アンテナ(アンテナID:No1)から無線タグxまでのRSSI値(距離換算値)であり、bは無線アンテナ(アンテナID:No2)から無線タグxまでのRSSI値(距離換算値)であり、cは無線アンテナ(アンテナID:No3)から無線タグxまでのRSSI値(距離換算値)である。dは無線アンテナ(アンテナID:No4)から無線タグyまでのRSSI値(距離換算値)であり、eは無線アンテナ(アンテナID:No5)から無線タグyまでのRSSI値(距離換算値)である。そして、fは無線アンテナ(アンテナID:No4)から無線タグzまでのRSSI値(距離換算値)である。Aは無線アンテナ間(アンテナID:No1からNo2)の距離であり、Bは無線アンテナ間(アンテナID:No2からNo3)の距離であり、Cは無線アンテナ間(アンテナID:No1からNo3)の距離であり、Dは無線アンテナ間(アンテナID:No4からNo5)の距離である。
【0072】
無線タグxは、例えば3点測定により位置推定される。RSSI値(a,b,c)及び設置位置(アンテナID:No1,No2,No3)より大小関係を求める。
a≦b≦cの場合、
A≦B≦Cの場合(既知の値)
a≦b≦C
a≦A≦b
B≦b≦b
a,b,c及びA,B,Cの大小関係をその都度求めながら次の3平方の定理により座標位置を推定する。
【0073】
(A×A)+(B×B)=(C×C)(既知の値)
(1)最も小さいaについて仮の換算値を決め、次に大きいbを求める。
(a×a)+(A×A)=(b×b)
(2)最も大きいcを求める。
(B×B)+(b×b)=(c×c)
(3)最も小さいaを求める(確認処理)。
(a×a)+(C×C)=(c×c)
【0074】
(4)上記(1)の換算値aと(3)で求めた値aが等しくなるまで(1)から(4)を繰り返す。
1)「(1)の換算値a>(3)で求めた値a」の場合、差の1/2を(1)の換算値aより減算する。
2)「(1)の換算値a<(3)で求めた値a」の場合、差の1/2を(1)の換算値aを加算する。そして、アンテナID:No4,No5のRSSI値が無いことにより、上記のように求めたa,b,cの値により、無線タグxのX座標,Y座標を決定し位置を推定する。
【0075】
無線タグyは、例えば2点測定により位置推定される。
(1)換算値の精度に依存した位置となる。
d≦eの場合
Dは既知の値
d≦e≦D
最も小さいdについて換算値を決め、次に大きいeを求める。
(e×e)=(D×D)+(d×d)
【0076】
アンテナID:No1,No2,No3のRSSI値が無いことにより、上記のように求めたd,e K値より、無線タグyのX座標,Y座標を決定し、位置を推定する。その場合、アンテナの設置条件(位置)により、ある程度の方向を決定する。
【0077】
無線タグzは、例えば1点測定により位置推定される。
(1)アンテナの位置から換算値の同心円の範囲内となる。
(2)アンテナID:No1,No2,No3,No5のRSSI値が無いことにより、換算したfの値より、無産タグzのX座標,Y座標を決定し、位置を推定する。その場合、アンテナの設置条件(位置)により、ある程度の方向を決定する。
【0078】
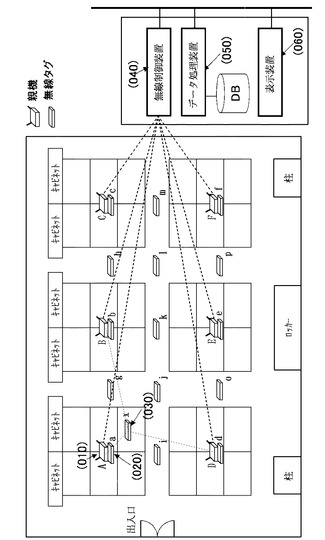
図14には、この発明に係る無線位置検出システムの他の一実施例のブロック図が示されている。この実施例では、より高い精度の位置推定を可能にするために前記X方向に関しては、基準タグaとbの中点部に基準タグgが追加され、基準タグbとcの中点部に基準タグhが追加される。同様に、基準タグdとeの中点部に基準タグoが追加され、基準タグeとfの中点部に基準タグpが追加される。前記Y方向に関しても同様に基準タグaとdの中点部に基準タグiが追加され、追加された基準タグgとoの中点部に基準タグjが追加される。基準タグbとeの中点部に基準タグkが追加され、追加された基準タグhとpの中点部に基準タグlが追加され、基準タグcとfの中点部に基準タグmが追加される。このような追加基準タグg〜pのRSSI値も位置推定に利用できるため、高い感度領域でのRSSI値・距離曲線を使用できるのでより高い精度での管理対象となる無線タグxの位置推定が可能になる。
【0079】
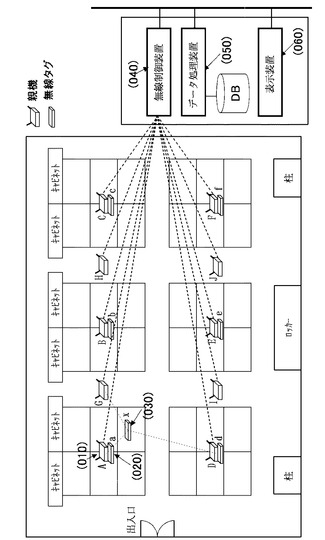
図15には、この発明に係る無線位置検出システムの更に他の一実施例のブロック図が示されている。この実施例では、より高い精度の位置推定を可能にするために前記X方向に関しては、親機AとBの中点部に親機Gが追加され、親機BとCの中点部に親機Hが追加される。同様に、親機DとEの中点部に親機Iが追加され、親機EとFの中点部に親機Jが追加される。このような親機G〜Jからのアンテナ出力に対応して基準タグa〜fのRSSI値、及び管理対象となる無線タグxにおいても上記追加された親機G〜Jからのアンテナ出力に対応したRSSI値が利用できるので、高い感度領域でのRSSI値・距離曲線を使用できるので無線タグxの位置推定がより高い精度で推定可能になる。
【0080】
管理対象のアクティブ型無線タグは、引き剥がしや電波が届かなくなった場合にブザーが鳴り、あるいはLED(発光ダイオード)が点滅させるような機能を付加してもよい。この機能を付加する場合、予め無効(ブザーを停止、あるいはLEDの点滅を停止)にできるようにしてもよい。また、電池残量がしきい値レベル1(電池交換時期)、しきい値レベル2(交換しないと正しく動作でいない)に達した場合に親機(無線アンテナ)に通知するような機能を付加することが望ましい。更に、管理対象の無線タグは、不正持ち出しや盗難が発生した場合、コマンド制御でブザーを鳴らしたり、止めたりあるいはLEDを点滅させたり、止めたりすることができるようにしてもよい。
【0081】
本発明者によってなされた発明を、前記実施形態に基づき具体的に説明したが、本発明は、前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能である。例えば、前記図14や図15のように親機と基準タグの数は、同一である必要はない。そして、その相対的な位置関係も任意でよい。前記親機の基準タグの位置情報及び基準タグのRSSI値を参照して、管理対象となる無線タグの位置を推定する方法は、前記の他に種々の変形例を採ることができる。親機及び子機を制御する構成は、前記無線制御装置、データ処理装置、記憶装置の機能を実現するものであれば何であってもよい。前記実施例は、アクティブ型無線タグ(子機)を買い物カゴに取り付け、小売店における顧客の販売行動(店内の動線、長時間滞在場所、多く集まる場所等)を把握可能な動態管理・分析システムにも利用することができる。
【産業上の利用可能性】
【0082】
この発明は、アクティブ型の無線タグの無線位置検出システムと無線位置検出方法として広く利用することができる。
【符号の説明】
【0083】
A〜J…親機(無線アンテナ)、a〜p…子機(基準無線タグ),x〜z…管理対象の無線タグ、010…親機(無線アンテナ)、020…子機(基準無線タグ)、030…管理対象の子機(無線タグ)、040…無線制御装置、050…データ処理装置、DB…記憶装置(データベース)、060…表示装置。
【特許請求の範囲】
【請求項1】
管理エリアにおける特定の位置に分散して配置された複数の親機と、
上記管理エリアにおける特定の位置に分散して配置され、基準となる複数の第1無線タグと、
移動体に取り付けられ、上記第1無線タグと同じ性能を持つように製造された第2無線タグと、
上記複数の親機に対して無線信号の授受を行う無線制御装置と、
データ処理装置とを有し、
上記データ処理装置は、上記無線制御装置を制御して上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記管理エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する、
無線位置検出システム。
【請求項2】
請求項1において、
上記第1受信電界強度データが記憶される記憶装置を更に有し、上記参照される上記第1受信電界強度データが取り出される
無線位置検出システム。
【請求項3】
請求項2において、
上記記憶装置には、親機と第1無線タグ及び第2無線タグとし使用される無線タグとの間での受信電界強度と距離との相関関係が測定された補完データを有し、
上記データ処理装置は、上記補完データを用いて第1無線タグ間における移動体の推定位置を補完する
無線位置検出システム。
【請求項4】
請求項2又は3において、
移動体の推定された位置を表示する表示装置を更に有し、
表示画面上には、上記管理エリアと推定された移動体の位置の表示と、
上記各親機、基準となる第1無線タグの位置も表示可能にされる、
無線位置検出システム。
【請求項5】
管理エリアにおける特定の位置に分散して複数の親機を配置し、
上記管理エリアにおける特定の位置に分散して基準となる複数の第1無線タグを配置し、
位置管理すべき移動体に上記第1無線タグと同じ性能を持つように製造された第2無線タグを取り付け、
上記複数の親機に対して無線信号の授受を行う無線制御装置とそれを制御するデータ処理装置とを用い、
上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記管理エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する、
無線位置検出方法。
【請求項1】
管理エリアにおける特定の位置に分散して配置された複数の親機と、
上記管理エリアにおける特定の位置に分散して配置され、基準となる複数の第1無線タグと、
移動体に取り付けられ、上記第1無線タグと同じ性能を持つように製造された第2無線タグと、
上記複数の親機に対して無線信号の授受を行う無線制御装置と、
データ処理装置とを有し、
上記データ処理装置は、上記無線制御装置を制御して上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記管理エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する、
無線位置検出システム。
【請求項2】
請求項1において、
上記第1受信電界強度データが記憶される記憶装置を更に有し、上記参照される上記第1受信電界強度データが取り出される
無線位置検出システム。
【請求項3】
請求項2において、
上記記憶装置には、親機と第1無線タグ及び第2無線タグとし使用される無線タグとの間での受信電界強度と距離との相関関係が測定された補完データを有し、
上記データ処理装置は、上記補完データを用いて第1無線タグ間における移動体の推定位置を補完する
無線位置検出システム。
【請求項4】
請求項2又は3において、
移動体の推定された位置を表示する表示装置を更に有し、
表示画面上には、上記管理エリアと推定された移動体の位置の表示と、
上記各親機、基準となる第1無線タグの位置も表示可能にされる、
無線位置検出システム。
【請求項5】
管理エリアにおける特定の位置に分散して複数の親機を配置し、
上記管理エリアにおける特定の位置に分散して基準となる複数の第1無線タグを配置し、
位置管理すべき移動体に上記第1無線タグと同じ性能を持つように製造された第2無線タグを取り付け、
上記複数の親機に対して無線信号の授受を行う無線制御装置とそれを制御するデータ処理装置とを用い、
上記各親機に対する上記第1無線タグの第1受信電界強度データと、上記各親機に対する第2無線タグの第2受信電界強度データを取得し、上記第2受信電界強度データのうち大きい順の所定データとそれに対応する親機を抽出し、上記抽出された親機に関する上記第1無線タグの第1受信電界強度データを参照して、上記管理エリアにおける該当する親機の特定の位置情報と、該当する基準となる複数の第1無線タグの特定の位置情報とから第2無線タグが取り付けられた移動体の位置を推定する、
無線位置検出方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−158411(P2011−158411A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−21792(P2010−21792)
【出願日】平成22年2月3日(2010.2.3)
【出願人】(000233169)株式会社日立超エル・エス・アイ・システムズ (327)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年2月3日(2010.2.3)
【出願人】(000233169)株式会社日立超エル・エス・アイ・システムズ (327)
【Fターム(参考)】
[ Back to top ]