
Fターム[5J062EE00]の内容
無線による位置決定 (18,435) | 補正 (1,594)
Fターム[5J062EE00]の下位に属するFターム
電波伝搬 (576)
ドップラ効果 (140)
ディファレンシャル方式 (252)
時計 (359)
Fターム[5J062EE00]に分類される特許
1 - 20 / 267
測位衛星信号受信機、測位衛星信号の受信方法、および、プログラム
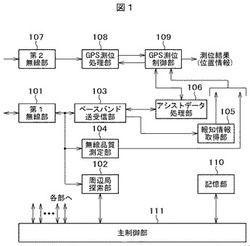
移動局装置
【課題】
GPSアシストデータを取得する際に、冗長な測位サーバクセスを抑制する。
【解決手段】
GPS衛星からGPS信号を受信し、測位サーバからアシストデータを受信して、GPS信号とアシストデータを用いて自局の位置を測定する移動局装置において、移動局装置が第1の位置にいるときに、基地局からの受信レベルと送信電力値により第1の概略位置を算出するとともに、第1のアシストデータを取得して測位処理を行い、移動局装置が第2の位置に移動したときに、第2の概略位置を算出し、第1の概略位置と第2の概略位置の間の移動距離が閾値未満の場合は、第2のアシストデータの取得を行わず、第1のアシストデータを用いて測位処理を行い、移動距離が閾値以上の場合は、第2のアシストデータを取得して測位処理を行う。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ

【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】GPSの電波受信がなされていない状況下での移動経路の補正を適正に行う。
【解決手段】測位装置100であって、GPSアンテナ2aによる信号の受信の再開後、GPS処理部2により測定された測位再開地点の位置に基づいて、自律航法制御処理部4により測定された移動経路の各地点の位置データを補正する補正処理部6と、測位再開地点の位置データと、GPS測位が再開された時点での自律航法測位された移動経路の第2地点の位置データとの差異量が所定値よりも大きいか否かを判定する判定部c1と、当該差異量が所定値よりも大きいと判定された場合に、移動経路の第1地点から第2地点までの経路長に対する移動経路の各地点までの経路長に基づいて、移動経路の各地点の位置データを補正させる第1補正処理を実行させる補正制御部6cとを備えている。
(もっと読む)
拡張SPS軌道情報を用いた位置特定のための方法および装置
【課題】移動局が衛星の場所を突き止めるのを支援する方法およびシステムの提供。
【解決手段】システム100は、場所支援サーバ130,データプロバイダ150,データプロバイダ110,データホスト160から構成される。場所支援サーバ130は、ネットワーク164を介して、リアルタイム軌道をデータプロバイダ150から受信する。また、ネットワーク162を介して、予想される軌道をデータプロバイダ110から受信する。サーバ130は、リアルタイム軌道及び予想される軌道から訂正データ140を作成する。訂正データ140は、データホスト160からネットワーク166を介して移動局120への送信する。
(もっと読む)
測位装置
【課題】衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができるようにする。
【解決手段】複数の候補位置pc毎に、電波が衛星#1,#2に到来する時間τ1(t),τ2(t)を算出する移動補償量計算部2と、到来時間τ1(t),τ2(t)を用いて、衛星#1,#2の受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、補償後の受信信号間の内積値cor(pc)を算出する内積値計算部4とを設け、複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
GPS測定システムおよびGPS測位方法
【課題】測位サーバが測位端末の位置を精度よく算出することができる、GPS測位システムおよびGPS測定方法を提供する。
【解決手段】無線基地局装置30は、フレーム番号を付与した同報フレームを測位端末装置10および測位サーバ装置20に送信し、測位端末装置は、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関する位相制御量を該台数分取得し、該位相制御量とフレーム番号とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置は、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号と第2のGPS受信機から取得した航法メッセージ情報とから、先頭C/Aコードを特定し、送信時刻と該時刻における衛星位置とを求め、測位演算を行う。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
エフェメリス拡張システムとGNSSでの使用方法
【課題】全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
(もっと読む)
情報処理装置、補正方法、及び補正プログラム
【課題】より適切な測位を実現すること。
【解決手段】アクセスポイントから得られる受信強度に基づいて測位を行う情報処理装置において、前記情報処理装置と誘電体との接触情報を検出する接触情報検出部と、前記接触情報に対応する利得データを含む利得テーブルを記録する記録部と、前記記録部の利得テーブルから、前記接触情報検出部により得られる前記接触情報に対応する利得データを抽出し、抽出した利得データを用いて利得を補正する補正部と、前記補正部により得られる利得と、前記受信強度とを用いて測位する測位部とを有する。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
位置特定装置、位置特定方法、プログラム、及び位置特定システム
【課題】移動体の位置特定を高精度化できる技術を提供する。
【解決手段】受信強度の補正値が受信強度毎に記憶されている補正値記憶部と、複数の送信装置を一意に識別する送信装置識別情報を送信装置から移動体が受信した際の受信強度を用いて、各送信装置の受信強度を示す受信特徴量を生成する受信特徴量生成手段と、所定の環境内の位置毎における送信装置の受信強度を示す位置毎受信特徴量が記憶されている位置毎受信特徴量記憶部と、生成した受信特徴量の各受信強度に基づいて、補正値記憶部から補正値を検索し、検索した補正値を用いて受信特徴量を補正する補正手段と、修正された受信特徴量と同じ又は近似する受信特徴量を、受信特徴量記憶部から検索して移動体の位置を特定する位置特定手段と、位置特定手段が検索した受信特徴量と、補正手段が検索した補正値とを用いて、補正値記憶部の受信強度の補正値を更新する更新手段とを有する。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
電波監視装置、及び電波監視方法
【課題】広域の監視対象エリアから監視対象(電波発射源)の位置を推定する際に、複数の方位センサの中から最適な方位センサを自動で選択する。
【解決手段】監視対象エリア1における監視対象2の位置を特定する位置特定情報(緯度・経度等)20bを、位置関連情報(住所・郵便番号等)20aと関連づけてデータベース20に登録する。位置検索部17は、監視対象2の位置関連情報20aを基にデータベース20を検索し、監視対象2の概略位置を特定する。最適センサ選択部18は、位置検索部17により特定された監視対象2の位置から各方位測定部(方位センサ)15までの距離を算出し、監視対象2からの距離が近い順に方位測定部15を2つ以上選択する。発射源位置推定部19では、選択された各方位測定部15により測定されたそれぞれの発射源方位の交点を求めることにより、監視対象2の位置を推定する。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
位置推定装置、位置推定方法およびプログラム
【課題】位置推定装置、位置推定方法およびプログラムを提供する。
【解決手段】基地局の位置情報を記憶している基地局情報記憶部と、前記基地局情報記憶部に記憶されている位置情報が制限範囲内である基地局の位置情報、および当該基地局から送信された無線信号の信号強度の測定情報に基づき、前記無線信号の測定位置を推定する位置推定部と、を備える位置推定装置。
(もっと読む)
1 - 20 / 267
[ Back to top ]