
Fターム[5J062EE00]の内容
無線による位置決定 (18,435) | 補正 (1,594)
Fターム[5J062EE00]の下位に属するFターム
電波伝搬 (576)
ドップラ効果 (140)
ディファレンシャル方式 (252)
時計 (359)
Fターム[5J062EE00]に分類される特許
141 - 160 / 267
データ取得装置及びデータ取得方法

【課題】使用者の現在地における高度や方位等の正確な地学的データを取得可能とする。
【解決手段】高度計測時には、圧力センサ15を用いて計測した第1の高度データを、GPS処理部3で受信した測位情報に基づき計測した第2の高度データによって補正し、最終的な高度データとする。また、磁気センサ14を用いて計測した磁北の方向と、GPS処理部3で受信した測位情報に基づき計測した磁北の方向との角度差を補正角データとしてRAM7に記憶しておき、方位計測時には、磁気センサ14を用いて計測した磁北の方向を補正角データによって補正し、最終的な方位データとする。
(もっと読む)
位置情報提供システム、位置情報提供装置および送信機

【課題】電波が届かない場所において位置情報を提供する。
【解決手段】位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S630)と、そのデータから座標値を取得するステップ(S632)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
干渉および電波妨害に対する感受性を低減したナビゲーションシステムのための方法および装置
ナビゲーションシステムは、GPSへのあらゆる形の干渉または電波妨害に対する著しいレベルの保護を、コスト効率のよい方法で提供する。このシステムは、GPSと組合せた地上基準局および地球低軌道(LEO)衛星のネットワークを採用する。基準局とユーザとをリンクする、GPS衛星への共通視野測距ジオメトリが、設定される。同じ対の基準局とユーザとの間のLEO衛星への第2の共通視野ジオメトリも設定される。地上局は、GPS、LEO衛星の信号の搬送波位相測定を行なうことにより、リアルタイムの支援信号を合成する。この支援情報はLEO衛星を介して、周囲の電波妨害を貫通するように高出力でユーザ受信機に送信される。ユーザ受信機は、LEO衛星の搬送波位相を追尾し、支援情報を復調して、次に、GPS信号の拡張された一貫した測定を可能にするように搬送波位相測定値および支援情報を適用する。このシステムはそれにより、電波妨害で失われたであろうGPS信号を復元させる。 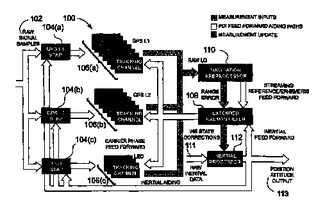 (もっと読む)
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
レーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法
【課題】 レーザ通信装置同士を対向するようにその姿勢を制御し、通信可能とするレーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法を提供することを目的とする。
【解決手段】 レーザ通信装置1から送信されたGPSデータに基づいて、レーザ通信装置の位置情報を演算し、2つのレーザ通信装置1の位置情報に基づいて、それぞれの通信相手側のレーザ通信装置1の補正領域29を演算し、それぞれの補正領域29に複数の計測点31,32を設定し、この計測点31,32にレーザ3の光軸が向かうようにレーザ通信装置1の制御角を演算し、前記制御角においてのレーザ3のゲイン値を取得し、当該ゲイン値を角度とともに記憶し、記憶されているゲイン値の中からゲイン値が最も高いときの方位角及び仰角に姿勢を制御する。
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
走行位置検知装置
【課題】移動体の接地位置を高精度に検知する。
【解決手段】走行位置検知装置10は、GPS電波受信アンテナ11により受信したGPSデータに基づいて装置本体の位置を示す「GPS位置データ」を一定時間毎に算出するGPS位置測位処理部12と、装置本体の路面に対する傾斜データを検出するための傾斜センサ15と、“前回のGPS位置データ”が算出されてから“新たなGPS位置データ”が算出されるまでの間、前回の位置データからの移動距離を求めて装置本体の位置を示す「自律位置データ」を一定時間毎に算出する自律位置測位処理部17と、位置データに対して路面の傾きを補正して、移動体5の接地位置データを算出する接地位置算出部18とを備える。
(もっと読む)
方位補正装置、方位補正方法、方位補正プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】方位誤差の蓄積を防ぐとともに、方位補正の最適化を図ること。
【解決手段】検知部301は、移動体が直進していることを検知し、検出部302は、検知部301によって直進を検知した場合、移動体の移動方向に関する移動方位を検出する。また、算出部303は、検知部301によって直進を検知した場合、移動体の周辺道路の敷設方向に関する道路方位を算出する。そして、比較部304は、検出部302によって検出された移動方位と、算出部303によって算出された道路方位とを比較して、補正部307は、比較部304によって比較された結果に基づいて、移動方位を補正する。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
測量スティッチングを用いる位置測定方法
モバイル通信デバイスは、異なる出来事の間に取得されてもよい衛星輸送手段のような複数の参照基地局および/または基地局からの測量値を用いて初期設定されるカルマンフィルターのような測位フィルターを含む位置決定に関する方法を用いる。したがって、当該測位フィルターは、同じ測量の出来事の間の少なくとも3つの異なる信号の第1の取得を必要することなく、位置の推定値に関して用いられてもよい。 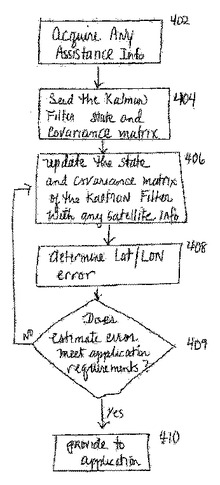 (もっと読む)
(もっと読む)
通信端末および通信端末を制御するためのプログラム
【課題】アシストデータを送信するための情報提供装置の構成を複雑にすることなく、当該アシストデータを取得できる通信端末を提供する。
【解決手段】通信端末100が実行する処理は、アシストデータ要取得基地局バッファ領域(領域430)と待受け基地局バッファ領域(領域410)に、取得した識別子を格納するステップ(S716)と、受信した信号から無線基地局の識別子を取得して、RAM346に格納するステップ(S724)と、変化後の無線基地局の識別子を待ち受け基地局バッファ領域に格納するステップ(S732)と、待受け基地局バッファ領域に格納されている識別子がアシストデータ要取得基地局バッファ領域に格納されていない場合に(ステップS740にてNO)、待受け基地局バッファ領域に格納されている識別子を、アシストデータ要取得基地局バッファ領域に格納するステップ(S742)とを含む。
(もっと読む)
マップマッチングに適するリンク設定システム、その方法およびプログラム
【課題】マップマッチングミスを無くすこと。
【解決手段】道路幅と平行する道路の道路幅や道路ネットワークの位置関係に応じてリンクのずらす方向とずらす距離を計算してリンクを設定する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】予め位置の分かっている基準局の数が少ない、端末間距離の誤差が大きい等といった位置推定の精度が良くない状況において、各端末の位置測位の精度を向上させる位置推定装置を提供する。
【解決手段】位置推定装置100は、通信範囲内にいる複数の端末の位置情報を管理する端末間距離管理部13と、端末間距離管理部13によって管理された情報を用いて、複数の端末の位置を推定する位置推定部14と、複数の端末のうち、特定の端末への測位指示に基づき、特定の端末への実測位結果を取得する測位部15とを備える。端末間距離管理部13は、測位部15によって取得された実測位結果をもとに、特定の端末の位置情報を補正し、位置推定部14は、端末間距離管理部13によって補正された位置情報に基づいて、再度、複数の端末の位置を推定する。
(もっと読む)
衛星測位システムによる物体の変位抽出方法
【課題】測位データを受け取ることができない場合でもフィルタ処理を可能にし得る衛星測位システムによる物体の変位抽出方法を提供する。
【解決手段】RTK方式による高精度なGPS測位データにより津波などの周期性変位を抽出する方法であって、GPS受信機からの測位データが監視施設に届かなかったときに、そのデータの欠落部分に、届かなくなる直前の所定の計測時間における高精度なデータの平均値を用いて、データの補完を行うことにより、測位データの連続性を維持させる方法である。
(もっと読む)
GNSSアプリケーションのためのエフェメリス拡張方法及び機器
【課題】長期間有効な衛星予測データを計算し、そのデータを圧縮して、圧縮したデータをGNSS受信機に供給するための方法及び機器を提示する。
【解決手段】著しく小さいファイルサイズの衛星予測データを生成して、遠くの受信機に送信するために、物理モデルを考慮した多段階の圧縮工程によりデータを圧縮する。
(もっと読む)
RTK−GPS測量システム
【課題】電波障害の少ない固定局を選択可能なRTK-GPS測量システムを提供する。
【解決手段】本発明のRTK-GPS測量システムは、RTK-GPS測量を実行するために、IP−VPN通信ネットワーク網10に、補正データを送信する固定局16、17と補正データを受信する移動局15との通信を確立するサーバ9が設けられ、
各固定局と移動局を構成する衛星測位手段が、人工衛星からの電波を受信する衛星測位部11と、各衛星測位手段との間での通信を行う通信部12と、衛星測位部11と通信部12との制御を行う制御部13とを少なくとも備え、移動局15の制御部13が固定局16、17の各衛星測位手段の制御部13に登録された障害物情報を受信して、複数の固定局の中から最適な補正データの送信を行う固定局を選択可能である。
(もっと読む)
無線通信ネットワークにおけるGPS衛星信号捕捉支援システムおよび方法
【課題】GPS衛星の配置からGPS衛星信号を捕捉する際に、統合形のGPS/無線端末ユニットを位置固定するのに必要な時間を低減するためのシステムおよび方法を提供する。
【解決手段】GPSのコードの位相サーチを狭めるための方法が含まれ、地理的位置の変数およびGPS時間に対する時間遅延を明らかにすることによって、狭いコード位相範囲を生成し、端末ユニットが必要なGPS衛星をより迅速に捕捉し、追跡し、それによって正確な位置情報を、要求しているエンティティへより迅速に供給できる。
(もっと読む)
衛星航法受信機
【課題】異なる信号を用いて測位演算を行う場合であっても、異なる信号毎に発生する擬似距離のバイアスの影響を受けずに正確な測位演算を行うことができる衛星航法受信機を提供することを目的とする。
【解決手段】衛星から、少なくとも2種以上の異なる信号を帯域制限フィルタを用いてフィルタリングし、フィルタリング後の信号から得られる擬似距離を使って測位演算を行う際に、前記異なる信号間の擬似距離バイアスの差分値である信号間バイアスを新たな未知数として、測位演算を行うことを特徴とする。また、本発明は、同じ種類の信号グループ毎にクロックオフセットをそれぞれ求め、その差から前記信号間バイアスを測定し、該測定した信号間バイアスで補正を行った擬似距離を用いて測位演算を行うようにしても良い。
(もっと読む)
エフェメリス拡張システムとGNSSでの使用方法
【課題】 全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】 放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
141 - 160 / 267
[ Back to top ]