
Fターム[5J062EE00]の内容
無線による位置決定 (18,435) | 補正 (1,594)
Fターム[5J062EE00]の下位に属するFターム
電波伝搬 (576)
ドップラ効果 (140)
ディファレンシャル方式 (252)
時計 (359)
Fターム[5J062EE00]に分類される特許
161 - 180 / 267
位置情報提供システム、位置情報提供装置および屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
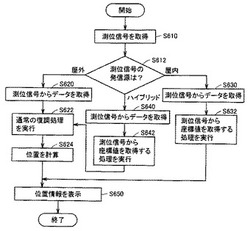
【解決手段】位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S630)と、そのデータから座標値を取得するステップ(S632)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】インコヒーレントの途中であっても、精度良く現在位置を測位することができる測位装置等を提供すること。
【解決手段】発信源から測位基礎符号を受信して、コヒーレントとインコヒーレントとからなる相関処理を行って、現在位置を測位する測位装置20であって、測位基礎符号の位相及び測位基礎符号を受信したときの信号強度とを含む基礎情報を算出する基礎情報算出手段と、信号強度に基づいて、位相の信頼度を算出する信頼度算出手段と、信頼度を評価する信頼度評価手段と、信頼度評価手段の評価結果に基づいて、インコヒーレントの途中において、現在位置の測位を行うインコヒーレント途中測位手段と、を有する。
(もっと読む)
データ通信方法、データ通信システム、データ送信局装置およびデータ受信端末装置
【課題】同じ送信電波を受信しても、受信したときの電波強度が異なった場合には、異なった情報を受信することを可能にする。
【解決手段】データ送信局装置1において、フレームデータ生成部は、送信制御データを含むプリアンブルデータと複数のデータセットとを連結してフレームデータを生成し、フレームデータ出力部16は、それぞれのデータセットがそれぞれ設定された送信データレートで出力されるようにフレームデータを出力し、伝送信号送出部17は、そのフレームデータを伝送信号として送出する。データ受信端末装置2において、伝送信号受信部21は、その伝送信号を受信し、プリアンブルデータ再生部22は、その受信信号から送信制御信号を再生し、データセット再生部24は、送信制御信号に含まれるデータセットそれぞれの送信データレートに基づき、前記受信信号からそれぞれのデータセットを再生する。
(もっと読む)
GPS妨害波抑制装置、及びGPS妨害波抑制システム
【課題】 未知情報である妨害波到来方向を推定する適応信号処理は、計算負荷が大きく、回路規模及び計算処理能力の増大を招くという欠点があった。
【解決手段】 自己の移動体に搭載されるGPS妨害波抑制装置であって、相手方移動体に対し妨害波を発生する妨害波発生装置から出力される妨害波発生装置の位置情報を含む妨害波対策信号を受信する通信アンテナと、GPS衛星よりGPS測位信号を受信するGPSアンテナと、GPSアンテナで受信されたGPS測位信号を用いて自己の移動体の位置情報を出力するGPS測位装置と、自己の移動体の姿勢角を求めるための角速度を計測する角速度センサと、通信アンテナで受信された妨害波対策信号とGPS測位装置から出力された自己の移動体の位置情報と角速度センサから出力された角速度を用いて妨害波到来方向を特定する妨害波到来方向特定部とを備える。
(もっと読む)
支援型ナビゲーションシステムのための方法および装置
本発明はナビゲーションシステム及びその要素に関する。ネットワーク要素(M)は、少なくとも1つのナビゲーションシステムに関連する支援データを形成するための受信機(M.2.2)を備える。ネットワーク要素(M)は、ナビゲーションシステム及び選択されたモードの標示を支援データに挿入し、選択されたデータに従い支援データを構築する。またネットワーク要素(M)は、支援データを通信ネットワーク(P)を介して装置(R)に送信するための送信機(M.3.1)を有する。装置(R)は、少なくとも1つの衛星ナビゲーションシステムの1つ以上の信号に基づいて測位を実行するための測位受信機(R.3)と、支援データをネットワーク要素(M)から受信するための受信機(R.2.2)と、受信した支援データを調査するように構成される調査要素(R.1.1)とを備える。支援データは、装置(R)の測位を実行するための測位受信機によって使用される。 (もっと読む)
携帯型電子デバイスのための位置決めシステム
GPS受信器(114、414、514、601、614)に情報を提供する方法には、見掛けの場所(116、416、516)を選択することと、複数の人工衛星(10)の位置に対応する位置情報(102、402、502、602)を受信することとを含む。その位置情報(102、402、502、602)を合成し、GPS受信器(114、414、514、601、614)が受信可能な無線周波数信号(112、412、512、612)として送信する。そのGPS受信器(114、414、514、601、614)がその無線周波数信号(112、412、512、612)を復調する場合、そのGPS受信器(114、414、514、601、614)が物理的にどこにあろうが、計算された位置はほぼ見掛けの場所(116、416、516)にあるだろう。 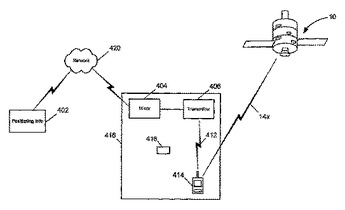 (もっと読む)
(もっと読む)
経路損失ポリゴンによる測位
本発明は測位支援データの準備する方法およびデバイス、並びにこの支援データに基づき位置決定を実行する方法、デバイスおよびシステムを提供する。測位支援データはエリア定義を含み、少なくとも各々の量子化経路損失測定値指標ベクトルに関係する。また、好ましくは、ベクトルは種々のセル間の相対的な無線状態および/または伝送モードに依存する。  (もっと読む)
(もっと読む)
全地球型衛星航法システム
第1および第2の衛星航法システム(NSS)の各々は、第1のおよび第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)をそれぞれ含んでいる。第1および第2の複数のSV各々は、第1および第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるのに適合されている。プロセッサは、第1の複数のユニークな対応するIDに応じて第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適している。プロセッサは、第2の複数のユニークな対応するIDに応じて第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するのに適合されている。 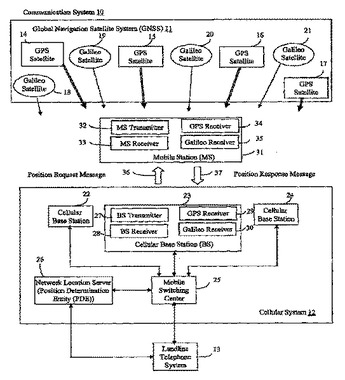 (もっと読む)
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】衛星電波の電波強度が極めて弱く、測位符号の積算時間を長時間確保する必要がある場合において、精度良く測位することができる測位装置等を提供すること。
【解決手段】測位衛星からの衛星電波に乗せられている測位基礎符号を使用して、現在位置を測位する測位装置20であって、第1周波数を含む少なくとも3つの周波数において、推定位相における相関値を示す第2相関情報とに基づいて、第2周波数を示す第2周波数情報を生成する第2周波数情報生成手段と、第1周波数情報と第2周波数情報との周波数差分を示す周波数差分情報を生成する周波数差分情報生成手段と、第1周波数に対する周波数差分の割合である周波数差分割合情報に基づいて、第1位相の誤差を示す第1位相誤差情報を生成する第1位相誤差情報生成手段と、第1位相誤差情報に基づいて、第1位相情報を補正して、第2位相を示す第2位相情報を生成する第2位相情報生成手段等を有する。
(もっと読む)
反転磁界システムでの金属不感受性
【課題】目標物の追跡方法および追跡システムを提供する。
【解決手段】目標物を追跡する方法は、位置を示す磁界を送信するための送信器を目標物に固定する過程と、目標物によって引き起こされた位置を示す磁界のひずみのマップを提供する過程と、を含む。目標物から送信された歪んだ磁界が検出される。歪んだ磁界は、目標物によって引き起こされた歪にさらされた位置を示す磁界を含んでいる。検出された歪んだ磁界に基づく目標物の推定された座標が、求められる。推定された座標およびマップが、補正された座標を計算するために用いられる。
(もっと読む)
姿勢標定装置、姿勢標定方法および姿勢標定プログラム
【課題】姿勢角の標定処理において、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にする。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を得ることができる補正係数演算装置を得る。
【解決手段】新たな前記GPS情報を取得する度に、当該取得した現在のGPS情報と、それに対して近い側から順に過去のGPS情報を選択し、選択数が所定数に到達するまで、当該現在のGPS情報に対して更に過去のGPS情報の選択を繰返し、途中に、距離補正係数の演算に不適当と考えられるGPS情報が存在する場合は、学習を終了する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】 たとえ測定角度に誤差が含まれていても、その誤差の影響を最小限に抑えて、移動体の位置を的確に検出することが可能な信頼性にすぐれた位置検出システムおよび位置検出方法を提供する。
【解決手段】 3つの光学ビーコンと移動体2とを結ぶ各方向線の相互間の角度を測定し、これら測定角度のうち、それぞれ2つの測定角度からなる複数の組合せを選定する。そして、選定される組合せごとに、それぞれの測定角度および各光学ビーコンの既知の位置を用いて、移動体2の位置を演算する。ただし、上記選定される組合せごとに、その測定角度の変化に対する上記演算位置の変化率を推定し、上記演算に際しては、上記選定される各組合せの測定角度のうち、上記推定される変化率が最小となる組合せの測定角度を用いて、移動体の位置を演算する。
(もっと読む)
衛星測位システムの移動局に支援データを提供する方法
衛星測位システムの衛星が、ある有効時間を有する暦表データを航法信号内で放送する。移動局では、位置測定の暦表データが求められる。支援される衛星測位システムにおいて、衛星により放射される航法信号の取得が、移動局に支援データが提供されると、容易になる。サーバ局で上記移動局により発せられる支援データ要求が受信され、その要求に応答する支援データの一部として暦表データをサーバ局が移動局に送信する。上記移動局により発せられる支援データ要求を受信して、サーバ局は、移動局が放送暦表データを提供されたなら、移動局が特定の位置測定精度を発生できるかどうかを、決定する。答えが肯定の場合、サーバ局は放送暦表データを移動局に送信する。答えが否定の場合、サーバ局は、放送暦表データの代わりに、要求された支援データの一部として長期暦表データを移動局に送信する。長期暦表データは衛星軌道予測から得られ、衛星により放送される暦表データに対して実質的に増大した有効期間を有する。  (もっと読む)
(もっと読む)
測位システム、端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】基地局の送信電波が周波数誤差を有することによって生じる衛星電波の捕捉時間の長時間化を解消することができる測位システム等を提供すること。
【解決手段】端末装置20Aは、基地局端末差分情報に基づいて、基地局端末周波数差分の公称周波数Aに対する割合を示す基地局端末誤差情報を生成する基地局端末誤差情報生成手段と、静止衛星端末差分情報に基づいて、静止衛星端末周波数差分の静止衛星周波数Bに対する割合を示す静止衛星端末誤差情報を生成する静止衛星端末誤差情報生成手段と、基地局端末誤差情報と静止衛星端末誤差情報に基づいて、通信基地局40Aの送信電波の周波数誤差を示す基地局周波数誤差情報を生成する基地局周波数誤差情報生成手段等を有する。
(もっと読む)
他車両位置検出装置
【課題】他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】車両Bが電波遮蔽物の多い指定道路・エリアにいる場合には現在から過去所定時間分の車両B位置算出情報を送信することにより、車両Bから送信された車両B位置算出情報が一旦途切れて受信することができないことがあり、車両Aのメモリ19にマップマッチング処理を行うために必要な現在から過去所定時間分の連続した車両B位置算出情報が格納されていない場合であったとしても、マップマッチングを行うために必要な車両B位置算出情報が蓄積されるまで待つことなく、車両Aはまとめて送信された現在から過去所定時間分の車両B位置算出情報を受信すると即座に車両Bの位置を検出することができる。
(もっと読む)
端末装置、外部装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自立型センサを有しないにもかかわらず、精度のよいマップマッチング結果を出力することができる端末装置等を提供すること。
【解決手段】観測可能衛星情報に基づいて、端末装置20の現在位置の測位に使用する測位衛星12a等の組である測位衛星組G1等のすべてを示す全衛星組情報を生成する全衛星組情報生成手段と、全衛星組情報に示される測位衛星組のすべてについて、測位を行って各測位衛星組に対応する測位位置P1等のすべてを示す全測位位置情報を生成する全測位位置情報生成手段と、すべての測位位置について、マップマッチングを行って、出力候補位置Pm1等を示す出力候補位置情報を生成する出力候補位置情報生成手段と、マップマッチングにおける補正が最も小さい出力候補位置を出力位置として選択し、出力位置を示す出力位置情報を生成する出力位置情報生成手段と、出力位置情報を出力する出力位置情報出力手段と、を有する。
(もっと読む)
放送システムにおける初期GPS信号を取得する方法及びそれによるシステム
端末を含む通信システムにおける初期全地球測位システム(GPS)信号を取得するシステム及び方法を提供する。上記システムは、各サービス地域の予め定められた位置に基づいて、地域別に区分された取得補助(AA)データを生成する補助GPS(AGPS)サーバと、上記生成されたAAデータを端末に放送する送信局と、上記放送されたAAデータを受信することにより、初期GPS信号を取得する上記端末と、を含む。また、上記方法は、各サービス地域の予め定められた位置に基づいて、地域別に区分されたAAデータを生成するステップと、上記生成されたAAデータを上記端末に放送するステップと、上記端末の各々が上記放送されたAAデータを受信することによりGPS信号を取得するステップと、含む。 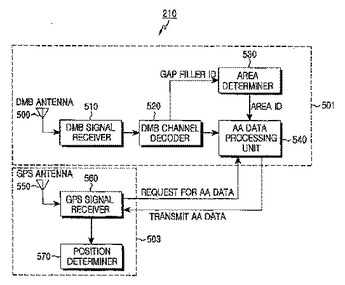 (もっと読む)
(もっと読む)
161 - 180 / 267
[ Back to top ]