
Fターム[5J062EE03]の内容
Fターム[5J062EE03]に分類される特許
1 - 20 / 140
測位装置及びプログラム
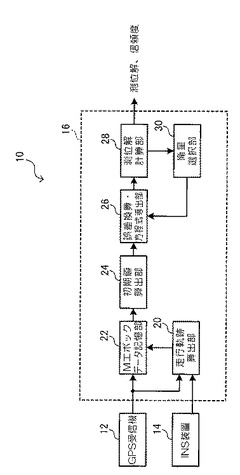
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
衛星信号受信機

【課題】回路規模の増加を抑えつつ、同時に複数の候補ローカル周波数を得る。
【解決手段】候補となる中心ローカル周波数を発生させるローカルキャリアNCO3と、候補となるドップラー周波数を発生させるドップラーキャリアNCO4と、ローカルキャリアNCO3の出力とドップラーキャリアNCO4の出力を入力して3つ以上の候補ローカル周波数を生成する候補周波数加減算回路5と、入力IF信号に対してコード発生器21からの拡散コードと候補周波数加減算回路5からの複数の候補ローカル周波数との相関演算を行う積分器80〜84と、を備え、候補周波数加減算回路5は、ドップラーキャリアNCO4の出力周波数を逓倍する周波数逓倍回路51と、ローカルキャリアNCO3の出力に対して、ドップラーキャリアNCO4および周波数逓倍回路51からの出力を加算または減算し、複数の候補周波数として出力する加減算器521〜524と、を備える。
(もっと読む)
移動体回転半径測定装置及び方法
【課題】移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供すること。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
(もっと読む)
移動体横流れ量計測装置及び方法
【課題】移動体の横流れ量を高精度に計測することができる移動体横流れ量計測装置及び方法を提供すること。
【解決手段】移動体横流れ量計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した計測開始時の速度から計測開始時の方向を算出し、算出した水平方向の速度を方位ごとに積算して東西南北方向の相対距離を算出し、算出した方位ごとの相対距離を、計測開始時の方向を基準とした座標系の距離に変換する。さらに、移動体横流れ量計測装置10は、水平方向の速度を積算して移動距離を算出し、算出した移動距離と、変換された座標系の距離のうち横流れ量を示す距離とを対応させて表示器1022に表示する。
(もっと読む)
人工衛星ベースの受信機に対するSBAS支援情報を持ったAGPSサーバ
【課題】特定の地表位置から視認可能な静止衛星型衛星航法増補システム(SBAS)の情報を提供される航法受信機が、それらから視認可能なSBAS衛星の擬似乱数(PRN)信号をインテリジェントに探索、捕捉、および追跡することができるようにする。
【解決手段】人工衛星航法システム支援サーバは、クライアント位置の表示を含むクライアントの要求に応答するように構成されている。人工衛星航法システム支援サーバは、正確な位置がサーバ要求に含まれる場合には、どの特定のSBASシステムが要求中のクライアントから観測可能であるかを演算する。この場合には、その応答を、人工衛星航法システム支援サーバは、よりコンパクトな応答メッセージに対する関連情報に制限する。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法
【課題】地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法を提供する。
【解決手段】拡張された干渉法装置を形成する、受信アンテナ(ANT1、ANT2、ANT3)を装備する人工衛星(SAT1、SAT2、SAT3)と、各衛星用の少なくとも1つの専用センサー(CAPTd_1、CAPTd_2、CAPTd_3)、及び衛星間通信手段(COMM1、COMM2、COMM3)を含む、衛星間相対計測装置と、衛星間相対計測装置により配信される、衛星の互いの相対位置の決定から来る、受信信号の日付決定用装置(DAT1、DAT2、DAT3)と、衛星のアンテナの、少なくとも1組を含む第二の干渉法装置と、地上基地局(SBS)と、衛星上で取得した測定値を地上基地局に送信するための装置と、衛星のうちの少なくとも1つの絶対位置を決定する手段(DPA)とを含むシステム。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
擬似距離誤差推定方法、位置算出方法及び擬似距離誤差推定装置
【課題】擬似距離に含まれる誤差を推定するための新たな手法の提案。
【解決手段】衛星から衛星信号を受信して、受信点から当該衛星までの観測擬似距離を求める。また、受信した衛星信号のドップラー周波数を測定し、当該ドップラー周波数を用いて予測擬似距離を算出する。そして、観測擬似距離と予測擬似距離とを用いて、観測擬似距離に含まれている第1の誤差を推定する。その一方で、所与の受信位置を用いて、観測擬似距離に含まれている第2の誤差を推定する。そして、第1の誤差と第2の誤差とを用いて、観測擬似距離に含まれている真正誤差を推定する。
(もっと読む)
衛星電波受信装置
【課題】 サイズを大型化せずに測位衛星からの信号検出時間を短縮することの出来る衛星電波受信装置を提供する。
【解決手段】 衛星電波受信装置において、受信手段と、衛星信号を検出するための演算を2以上の所定数の受信周波数に対して並列的に実行可能な検出演算手段(151、154)と、第1の周波数間隔で順番に設定した一の受信周波数の信号を検出演算手段に第1のビット数のデジタルデータとして取得させ、演算結果に基づいて衛星信号を検出する捕捉手段(156)と、衛星信号が検出された場合に、第1の周波数間隔より狭い第2の周波数間隔で順番に所定数個ずつ設定した受信周波数の信号を検出演算手段に第1のビット数より小さい第2のビット数のデジタルデータとして各々取得させ、並列的に行われる演算結果に基づいて衛星信号の受信周波数を特定する特定手段(156)と、を備える。
(もっと読む)
入力信号と基準周波数との周波数差を得る方法並びにこの方法を実行する弁別装置、GPS受信機及びコンピュータプログラム
【課題】動作範囲内で線形応答を示す、周波数弁別器を提供する。
【解決手段】実際の数の標本点の二倍である一群の点上での離散フーリエ変換に対する様な回転因子に通常の回転因子が置き換えられている離散フーリエ変換の変形に基づく周波数弁別器。その様に変更された離散フーリエ変換は、計算負担を殆ど追加することなく半ビン周波数弁別を可能にする。ゼロ周波数に関して半ビンだけ偏移された二つの離散フーリエ変換は、弁別の線形応答と雑音に対する良好な耐性とを与える。この弁別器は、GPS受信機中で信号を追尾するためのFLL中で特に有用である。
(もっと読む)
位置算出方法及び電子機器
【課題】位置算出用モジュールを搭載した電子機器における位置算出主体の適正化。
【解決手段】GPS処理部10と、GPS処理部10よりも演算処理能力の高いホスト処理部30とを備えた携帯型電話機1において、GPSアンテナ5は、GPS衛星から送出されるGPS衛星信号を受信する。GPS処理部10は、GPSアンテナ5が受信した信号に対する衛星サーチを行い、位置算出の基礎情報とするメジャメント情報を算出する。そして、ホスト処理部30は、GPS処理部10がメジャメント情報に基づいて位置算出するセルフモードと、ホスト処理部30がメジャメント情報に基づいて位置算出するホストモードとを、記憶部100に記憶されたモード切替条件テーブル103に従って切り替える。
(もっと読む)
衛星信号受信装置
【課題】 電源に無理な負荷をかけずに安定且つ高速な受信処理を行うことができる衛星信号受信装置を提供する。
【解決手段】 測位用衛星から送信された衛星信号を取得する衛星信号受信装置1において、測位用衛星が送信する周波数帯の電波を受信する受信手段12と、受信手段12が受信した電波に基づく所定の期間の受信データを記憶する記憶手段13と、記憶手段13に記憶された受信データから衛星信号を検出する検出手段16と、記憶手段13から検出手段16へのデータ出力処理速度、及び、記憶手段13から出力される受信データに基づく検出手段16による検出処理速度を制御し、データ出力処理速度と検出処理速度とを同期させて予め定められた処理速度から低減可能に構成されているクロック制御手段19、20と、を備えている。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
衛星信号捕捉方法及び受信装置
【課題】衛星信号の捕捉を適切に行うための新たな手法の提案。
【解決手段】GPS衛星からのGPS衛星信号を受信した受信信号を用いて、第1のドップラー周波数である仮ドップラー周波数を算出する。そして、加速度センサーを少なくとも含むセンサー部の計測結果を用いて慣性航法演算を行う慣性航法装置の算出結果と、仮ドップラー周波数とを用いて、第2のドップラー周波数である補助ドップラー周波数を算出する。そして、補助ドップラー周波数を用いてドップラー周波数を算出して、GPS衛星信号を捕捉・追尾する。
(もっと読む)
移動体高精度速度計測装置及び方法
【課題】GPS受信機から得られるドップラー速度情報の良否を判定し、高精度及び高信頼の速度をリアルタイムに出力する装置及び方法を提供すること。
【解決手段】移動体高精度速度計測装置10は、移動体の加速度及び角速度からストラップダウン演算により速度を算出し、GPS搬送波のドップラーシフト量から移動体のドップラー速度を測定し、ドップラー速度から良否係数を算出する。次に、遅延させたドップラー速度と、フィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量を算出し、算出した誤差量に良否係数を乗算し、良否係数を乗算した誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。そして、ストラップダウン演算により算出した速度に、カルマンフィルタによって推定演算された調整量を融合してリアルタイム補間速度を算出し、出力する。
(もっと読む)
受信装置、受信方法及び携帯端末
【課題】スリープ期間における平均電力及びピーク電力の低下を図ることが可能な受信装置を提供する。
【解決手段】衛星からの信号を受信する受信部と、受信信号の周波数を所定の中間周波数に変換する周波数変換部と、同期捕捉とキャリア周波数の検出とを行う同期捕捉部と、中間周波数信号に含まれるメッセージを復調する同期保持部と、を備え、同期保持部は、拡散符号に同期する拡散コードを生成する拡散コード生成部を含み、同期保持部は所定の周波数で発振する温度補償された発振器を発振源とするクロックで動作するカウンタを参照し、測位動作を行わないスリープ期間においてはカウンタのみを動作させ、スリープ期間が終了すると、制御部は前記カウンタで計測された経過時間から拡散コード周期の開始点を衛星毎に予測計算し、予測された開始点に合わせて衛星毎に割り当てられた拡散コード生成部を起動させる、受信装置が提供される。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法が適用された測位系の受信装置において、測位に適用される航行衛星の速度または位置の速やかな識別を可能とする測位支援装置に関し、ハードウェアやソフトウェアの構成が大幅に変更されることなく、高い精度による測位の開始を安価に実現できることを目的とする。
【解決手段】新たに測位に適用される航行衛星にかかわる物理量をフィードバック制御の下で求める測位支援装置であって、前記航行衛星から時系列の順に到来した航法データに応じて求められた前記物理量の列が前記フィードバック制御の過渡的な応答を示す式に代入された連立方程式の根として、前記物理量の収束値を推定する推定手段と、前記収束値を前記測位に適用する測位促進手段とを備える。
(もっと読む)
1 - 20 / 140
[ Back to top ]