
粒子線照射装置及び粒子線治療装置
【課題】スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることを目的とする。
【解決手段】荷電粒子ビーム1の進行方向を電場により変更し、照射対象16へのビーム1の出射及び遮断を行うビーム偏向器2と、電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26を有し、導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、ビーム1が導体板27a〜27hの短手方向を通過する粒子移動基本時間TP0に、導体板27a〜27hの長手方向を伝送する伝送基本時間TV0を同期させた電圧パルス31を出力する。
【解決手段】荷電粒子ビーム1の進行方向を電場により変更し、照射対象16へのビーム1の出射及び遮断を行うビーム偏向器2と、電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26を有し、導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、ビーム1が導体板27a〜27hの短手方向を通過する粒子移動基本時間TP0に、導体板27a〜27hの長手方向を伝送する伝送基本時間TV0を同期させた電圧パルス31を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医療用や研究用に用いられる粒子線治療装置に関し、特にスポットスキャニングやラスタースキャニングといった走査型の粒子線治療装置に関する。
【背景技術】
【0002】
一般に粒子線治療装置は、荷電粒子ビームを発生するビーム発生装置と、ビーム発生装置につながれ、発生した荷電粒子ビームを加速する加速器と、加速器で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送するビーム輸送系と、ビーム輸送系の下流に設置され、荷電粒子ビームを照射対象に照射するための粒子線照射装置とを備える。粒子線照射装置には大きく、荷電粒子ビームを散乱体で散乱拡大し、拡大した荷電粒子ビームを照射対象の形状にあわせて照射野を形成するブロード照射方式と、照射対象の形状に合わせるように、細いペンシル状のビームを走査して照射野形成するスキャニング照射方式(スポットスキャニング、ラスタースキャニング等)とがある。
【0003】
ブロード照射方式は、コリメータやボーラスを用いて患部形状に合う照射野を形成する。患部形状に合う照射野を形成し、正常組織への不要な照射を防いでおり、最も汎用的に用いられている、優れた照射方式である。しかし、患者ごとにボーラスを製作したり、患部に合わせてコリメータを変形させたりする必要がある。
【0004】
一方、スキャニング照射方式は、コリメータやボーラスが不要といった自由度の高い照射方式である。しかし、患部以外の正常組織への照射を防ぐこれら部品を用いないため、ブロード照射方式以上に高いビーム照射位置精度が要求され、かつ、荷電粒子ビームによる照射線量を高い精度で制御することが要求される。また、一般的に患部形状は3次元形状となっているので、スキャニング照射方式では、照射対象を複数層(スライス)に分割して、1つの層(スライス)毎に荷電粒子ビームのエネルギーを変更したうえで、照射対象に照射を行うことになり、荷電粒子ビームの出射と遮断を行う必要がある。
【0005】
特許文献1には、荷電粒子ビームの出射と遮断を行うビーム遮断用電磁石をビーム輸送系に配置し、荷電粒子ビームの出射と遮断を行う際に、このビーム遮断用電磁石により発生させる磁場をステップ的に立ち上がり/立ち下がりさせない、すなわち高速にON/OFFさせない場合は、出射ビームが遮断されるまでに時間がかかり、遮断遅延による漏れビーム(ビーム出力波形の立ち上がり、立ち下がり部分に緩い傾斜)が生じることが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−45170号公報(0036段から0040段)
【発明の概要】
【発明が解決しようとする課題】
【0007】
ラスタースキャニング照射方式においては、照射対象の複数層の1つの層(スライス)に荷電粒子ビームを2次元的に走査し照射野を形成した後に荷電粒子ビームを停止して、次の層(スライス)に移動してから荷電粒子ビームを走査して3次元的に照射野を形成する。また、スポットスキャニング照射方式においては、各層内を複数に分割した照射スポット毎に所定の線量に到達したら、荷電粒子ビームを遮断(OFF)してから次の照射スポットに移動して荷電粒子ビームを与える。したがって、ラスタースキャニング照射方式やスポットスキャニング照射方式では、漏れビームが存在する場合は、漏れビームにより漏れ照射が行われ、これによる過渡線量が存在すると照射線量精度が低下してしまう問題があった。特にスポットスキャニング照射方式においては、スポット毎に荷電粒子ビームの出射及び停止を行うため、ビーム漏れによる過渡線量の影響はラスタースキャニング照射方式に比べて非常に大きい。
【0008】
本発明は上記のような課題を解決するためになされたものであり、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることを目的とする。
【課題を解決するための手段】
【0009】
走査電磁石の上流側に配置され、荷電粒子ビームの進行方向を電場により変更し、照射対象への荷電粒子ビームの出射及び遮断を行うビーム偏向器と、荷電粒子ビームの進行方向を制御する電圧パルスをビーム偏向器に出力するビーム偏向器制御装置を備える。ビーム偏向器は、荷電粒子ビームの進行方向に短手方向を並べた複数の導体板が配置されたライン電極板と、ライン電極板に平行に配置された電極板と、ライン電極板と電極板との間に荷電粒子ビームが通過する通過領域を有し、複数の導体板は、長手方向に直列に接続され、インピーダンス整合がされている。ビーム偏向器制御装置は、荷電粒子ビームが複数の導体板の短手方向を通過する通過周期である粒子移動基本時間に、複数の導体板の長手方向を伝送する伝送周期である伝送基本時間を同期させた電圧パルスを出力する。
【発明の効果】
【0010】
本発明に係る粒子線照射装置は、従来の偏向キッカー電磁石に印加する電圧よりも低電圧の電圧パルスをライン電極板に供給し、電圧パルスの立下り時間を短くしたので、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の粒子線治療装置の概略構成図である。
【図2】図1の粒子線照射装置を示す構成図である。
【図3】本発明の実施の形態1によるビーム偏向器を示す図である。
【図4】図4のビーム偏向器を上から見た上面図である。
【図5】図4のビーム偏向器のマイクロストリップラインを説明する図である。
【図6】図3のビーム偏向器に印加する電界Eの計算条件を説明する図である。
【図7】図2のビーム偏向器のビーム出力波形を説明する図である。
【図8】図1の粒子線照射装置の制御方法を示すフローチャートである。
【図9】図2のビーム偏向器のビーム制御を説明する図である。
【図10】本発明の実施の形態2による粒子線照射装置を示す構成図である。
【図11】本発明の実施の形態2によるビーム偏向器を示す図である。
【図12】本発明の実施の形態3による粒子線照射装置を示す構成図である。
【図13】本発明の実施の形態3によるビーム偏向器を示す図である。
【図14】本発明の実施の形態4による粒子線照射装置を示す構成図である。
【図15】本発明の実施の形態4によるビーム偏向器を示す図である。
【発明を実施するための形態】
【0012】
実施の形態1.
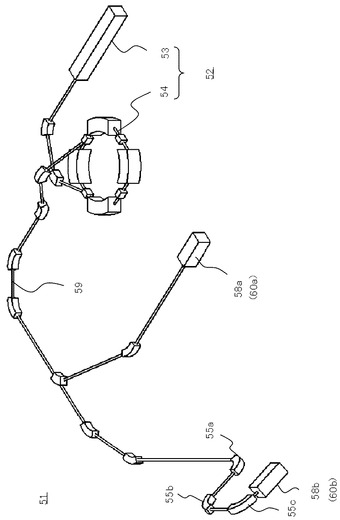
図1は本発明の粒子線治療装置の概略構成図である。粒子線治療装置51は、ビーム発生装置52と、ビーム輸送系59と、粒子線照射装置58a、58b(又は60a、60b)とを備える。ビーム発生装置52は、イオン源(図示せず)と、前段加速器53と、シンクロトロン54とを有する。粒子線照射装置58b(60b)は回転ガントリ(図示せず)に設置される。粒子線照射装置58a(60a)は回転ガントリを有しない治療室
に設置される。ビーム輸送系59の役割はシンクロトロン54と粒子線照射装置58a、58bの連絡にある。ビーム輸送系59の一部は回転ガントリ(図示せず)に設置され、その部分には複数の偏向電磁石55a、55b、55cを有する。
【0013】
イオン源で発生した陽子線等の粒子線である荷電粒子ビーム1は、前段加速器53で加速され、シンクロトロン54に入射される。荷電粒子ビーム1は、所定のエネルギーまで加速される。シンクロトロン54から出射された荷電粒子ビーム1は、ビーム輸送系59を経て粒子線照射装置58a(60a)、58b(60b)に輸送される。粒子線照射装置58a(60a)、58b(60b)は荷電粒子ビームを治療台8に固定された患者10の照射対象16(図2参照)に照射する。
【0014】
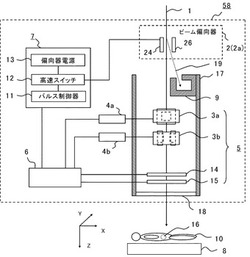
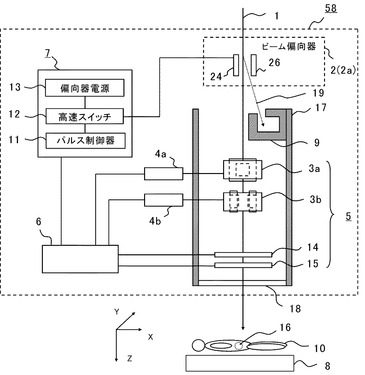
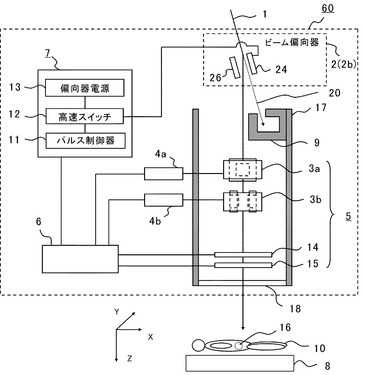
図2は本発明の実施の形態1による粒子線照射装置を示す構成図である。ビーム発生装置52で発生され、所定のエネルギーまで加速された荷電粒子ビーム1は、ビーム輸送系59を経由し、粒子線照射装置58へと導かれる。粒子線照射装置58は、荷電粒子ビーム1に垂直な方向であるX方向及びY方向に荷電粒子ビーム1を走査するX方向走査電磁石3a及びY方向走査電磁石3bと、位置モニタ14と、線量モニタ15と、X方向走査電磁石電源4aと、Y方向走査電磁石電源4bと、ビーム偏向器2と、ビーム偏向器制御装置7と、粒子線照射装置58の照射系5及びビーム偏向器制御装置7を制御する照射制御装置6とを備える。X方向走査電磁石3a、Y方向走査電磁石3b、位置モニタ14、線量モニタ15は照射系5を構成する。照射系5は筐体17に配置され、照射系5の上側である筐体17の上側にビームダンプ9が配置される。ビームダンプ9は鉛等の重金属材料を用いて形成される。ビーム偏向器制御装置7は、パルス制御器11と、高速スイッチ(スイッチ)12と、偏向器電源13を有する。なお、高速スイッチの例として、例えばBEHLKE社製の高電圧・高速半導体スイッチ等を用いることができる。また、荷電粒子ビーム1の進行方向はZ方向である。また、図2において筐体17及びビームダンプ9は断面を示している。
【0015】
ビーム偏向器2は、ビーム偏向器制御装置7により制御される。ビーム偏向器2は、粒子線照射装置58に入射される粒子線ビーム1の進行方向を電場により変更し、粒子線ビーム1を所定の照射期間に照射系5へ導き、所定の照射期間以外には粒子線ビーム1をビームダンプ9の側に導き、照射系5への粒子線ビーム1を遮断する。実施の形態1では粒子線ビーム1を偏向し、偏向された偏向ビーム19をビームダンプ9に導き、照射系5への粒子線ビーム1を遮断する。X方向走査電磁石3aは荷電粒子ビーム1をX方向に走査する走査電磁石であり、Y方向走査電磁石3bは荷電粒子ビーム1をY方向に走査する走査電磁石である。X方向走査電磁石3a及びY方向走査電磁石3bは、荷電粒子ビーム1を走査する。X方向走査電磁石電源4aは、X方向走査電磁石3aへ荷電粒子ビーム1を走査するための励磁電流を供給する。Y方向走査電磁石電源4bは、Y方向走査電磁石3bへ荷電粒子ビーム1を走査するための励磁電流を供給する。
【0016】
線量モニタ15は荷電粒子ビーム1の照射線量を検出する。照射制御装置6は、図示しない治療計画装置で作成された治療計画データに基づいて、照射対象16における荷電粒子ビーム1の照射位置を制御し、線量モニタ15で測定され、図示しない線量データ変換器でデジタルデータに変換された線量が目標線量に達するとビーム偏向器制御装置7に指令(ビーム遮断指令)を出し、ビーム偏向器2が荷電粒子ビーム1を遮断する。X方向走査電磁石電源4a及びY方向走査電磁石電源4bは、照射制御装置6から出力されたX方向走査電磁石3a及びY方向走査電磁石3bへの制御入力(指令)に基づいてX方向走査電磁石3a及びY方向走査電磁石3bの励磁電流を変化させる。
【0017】
ビーム偏向器制御装置7は、偏向器電源13が供給する電圧を高速スイッチ12によってパルス状にスイッチングを行い、すなわち、パルス状に形成する。偏向器電源13が供
給する電圧は形成したパルスのハイレベルの電圧になる。この際、ビーム偏向器制御装置7のパルス制御器11は、高速スイッチ12がスイッチする間隔及び周期を制御する。粒子線照射装置58に入射する荷電粒子ビーム1は、ビーム偏向器2、照射系5を経て、筐体17の下側に配置される照射窓18から出射され、治療台8に固定された患者10の照射対象16に照射される。
【0018】
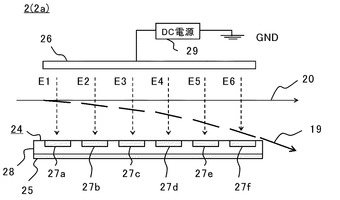
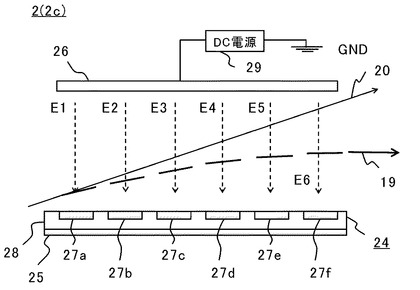
ビーム偏向器2を詳しく説明する。図3は本発明の実施の形態1によるビーム偏向器を示す図であり、図4はビーム偏向器を上から見た上面図であり、図5はビーム偏向器のマイクロストリップラインを説明する図である。なお、図3では導体板27を6つ配置した例であり、図4及び5は、導体板27を8つ配置した例を示している。ビーム偏向器2は、マイクロストリップライン式静電電極板24(以降、単にライン電極板と称する)とライン電極板24に対向する電極板26を有する。ライン電極板24は、GFRP(glass fiber reinforced plastics)板等の基板28の表面に複数の銅板等の導体板27を並行に配置し、基板28の裏面に銅板等の裏面導体25を配置したものである。裏面導体25は接地レベルにされ(GNDに接続され)、電極板26はDC電源(直流電源)29に接続され、ライン電極板24の各導体板27には電圧パルス31が伝送される。電極板26とライン電極板24は、荷電粒子ビーム1の入射ビーム軸に対し平行に設置される。ビーム偏向器2は、ライン電極板と電極板との間に荷電粒子ビームが通過する通過領域を有する。ライン電極板24にパルス電圧31が入力されない場合に、すなわち接地レベルの電圧が印加された場合に、電極板26とライン電極板24との間に作られる各電場E1〜E6(方向は電極板26からライン電極板24)により荷電粒子ビーム1は偏向される。ライン電極板24にパルス電圧31が入力された場合は、電極板26とライン電極板24との間に作られる各電場E1〜E6が相殺するように動作させることで、荷電粒子ビーム1は直進する。電場E1は導体板27aと電極板26間の電場である。同様に電場E2〜E6は、それぞれ導体板27b〜27fと電極板26間の電場である。なお、図3において、ライン電極板24及び電極板26は断面を示している。
【0019】
ライン電極板24にパルス電圧31が入力されない場合、すなわち接地レベルの電圧が印加された場合は、荷電粒子ビーム1は偏向され、荷電粒子ビーム1は偏向ビーム19となって入射ビーム軸からそれてビーム偏向器2を通過する。ライン電極板24にパルス電圧31が入力された場合は、荷電粒子ビーム1は偏向されず、荷電粒子ビーム1は直進ビーム20となって入射ビーム軸に沿ってビーム偏向器2を通過する。これによりライン電極板24にスイッチングされた電圧パルス31が伝送されている場合のみ、荷電粒子ビーム1を直進させ、それ以外は偏向させる機能を、一つのライン電極板24により行うことができる。
【0020】
ライン電極板24は、図5に示すように、幅W、長さL1(図4参照)、厚さt1の導体板27a〜27hが、厚さt2の基板28に露出して配置される。ライン電極板24はマイクロストリップラインの構造を備えるので、マイクロストリップラインのインピーダンスマッチング(インピーダンス整合)の原理により、導体板27a〜27hのそれぞれは、所定のインピーダンス(例えば50Ω)を有する。また、図4に示すように導体板27a〜27hはそれぞれ間隔Sだけ間隔を空けて配置される。ここでマイクロストリップラインの特性インピーダンスZ0は、基板28の比誘電率をεrとすると数式(1)のように表わせる。
Z0=87/√(εr+1.41)×ln(A/B) ・・・(1)
なお、A及びBは、それぞれ数式(2)及び数式(3)のように表わせる。
A=5.98×(t2−t1) ・・・(2)
B=0.8×W×t1 ・・・(3)
比誘電率をεr、幅W、厚さt1、厚さt2を選択することで、所定のインピーダンス
(例えば50Ω)を得ることができる。
【0021】
図4に示すように、ライン電極板24の8つの導体板27a〜27hは、それぞれ遅延配線32(32a〜32g)で接続され、1本の伝送路を構成するように直列接続される。導体板27aには電圧パルス31を導入する入力配線37が接続され、導体板27hの終端には一端が接地された終端抵抗33が接続される。ライン電極板24の各導体板27a〜27hは所定のインピーダンス(例えば50Ω)を有し、終端でインピーダンスマッチング用の終端抵抗33を介して接地されるので、ライン電極板24に入力されるスイッチングされた電圧パルス31は反射することなく、ライン電極板24内を伝送することができる。なお、遅延配線32(32a〜32g)と終端抵抗33のインピーダンスは導体板27a〜27hのインピーダンスと等しくする。
【0022】
また、遅延配線32a〜32gは、基板28にプリント配線のようにリソグラフィ技術や多層配線技術を用いて形成してもよい。遅延配線32a〜32gを基板28に形成することで、遅延配線32a〜32gの半田接続作業等が不要となり、ライン電極板24でのインピーダンス調整を容易に行うことができる。
【0023】
ビーム偏向器2により荷電粒子ビーム1の進行を制御する方法を詳しく説明する。荷電粒子ビーム1は複数の荷電粒子30(適宜、粒子30と称する)の束なので、1つの粒子30が導体板27の短手方向(短辺)を通過する時間と電圧パルス31が導体板27の長手方向(長辺)を通過する時間とが後述する所定の同期関係になるようにライン電極板24を構成することで、初めの導体板27aで電圧パルス31の影響を受けた粒子群のみが、次の導体板27b〜27hでも電圧パルス31の影響を受けるようにする。これにより、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群は電場Eの影響を受けなくなり、ビームを直進させることができる。
【0024】
粒子30はライン電極板24の中央を通過する場合を考える。ビームの中心成分に注目し、ビームの中心成分がライン電極板24を通るように位置調整し、使用するからである。粒子30の速度をv1とすると、粒子30が導体板27を通過する時間はW/v1である。粒子30が導体板27の短手方向(短辺)を通過し、次の導体板27に到達する時間(粒子移動基本時間)TP0は、(W+S)/v1となる。所定の伝送特性を有する導体板27を伝送する電圧パルス31の速度をv2とすると、電圧パルス31が導体板27の長手方向(長辺)を通過する時間は、L1/v2である。また、遅延配線32の伝搬遅延時間TDから、導体板27の長手方向の長さに相当する実効長L2を導入する。実効長L2はv2×TDで計算できる。初めの導体板27を通過して遅延配線32を通過した時間、すなわち初めの導体板27を通過して次の導体板27に到達する時間(伝送基本時間)TV0は、(L1+L2)/v2となる。粒子移動基本時間TP0と伝送基本時間TV0とが一致するようにライン電極板24を構成する。このようにすることで、上述の所定の同期関係を実現でき、上述したように、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群は電場Eの影響を受けなくなり、ビームを直進させることができる。なお、粒子移動基本時間TP0は荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期であり、伝送基本時間TV0は複数の導体板27a〜27hの長手方向を伝送する伝送周期である。
【0025】
上述の粒子移動基本時間TP0と伝送基本時間TV0とが一致する所定の同期関係を実現する上で、必要となる粒子30の速度v1と電圧パルス31の伝送速度v2について説明する。粒子30の速度v1と電圧パルス31の伝送速度v2は、それぞれ数式(4)及び数式(5)のように表わせる。
v1=c×√(1−(T/(T+K))2) ・・・(4)
v2=1/√(L×C) ・・・(5)
ここで、Kは粒子30のエネルギー(MeV)、cは光速、Tは陽子の静止エネルギー、Lは導体板27のインダクタンス、Cは導体板27の電気容量である。
【0026】
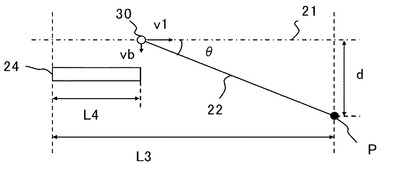
ビーム偏向器2で荷電粒子ビーム1に印加する電界Eについて説明する。図6は電界Eを計算するための条件を説明する図である。21は荷電粒子ビーム1がビーム偏向器2を通過する直進ビーム20に平行な直進ビーム平行軸である。点Pは荷電粒子ビーム1の偏向距離dを評価するための評価点であり、例えばビームダンプ9の内部点である。ライン電極板24の長さをL4とし、ライン電極板24の前端から評価点Pまでの直進ビーム平行軸上での距離をL3とする。ライン電極板24の終端において、荷電粒子30は直進ビーム平行軸方向の速度成分はv1であるが、荷電粒子30は電界Eの影響を受けて、ライン電極板24の垂直方向成分を得る。この荷電粒子30の速度における垂直方向成分(垂直方向速度成分)をvbとする。また、偏向ビーム軌道22と直進ビーム平行軸21の角度をθとする。荷電粒子30の垂直方向速度成分vbは、v1×tanθなので、数式(6)のように表わされる。
vb=v1×d/(L3−L4) ・・・(6)
【0027】
荷電粒子30がライン電極板24の終端において、垂直方向速度成分vbの速度を持つために必要な電位差Vを考える。陽子の質量をm1、電荷をqとすると、ライン電極板24の終端において、運動エネルギーは1/2×m1×vb2であり、電位差Vによって荷電粒子30が得るエネルギーはq×Vなので、電位差Vは数式(7)のように表わされる。
V=(1/2×m1×vb2)/q ・・・(7)
ライン電極板24の終端において必要な電位差Vは、ライン電極板24のn1本の導体板27のそれぞれで分担することになる。すなわち、荷電粒子30が導体板27の1本当たりV/n1の電位差を受けるように、ライン電極板24のn1本の導体板27と電極板26間に電界Eを発生させればよい。導体板27の幅Wを通過する場合に、その幅Wを通過する時間はv1/Wなので、ライン電極板24の垂直方向の移動距離daは、数式(8)のように表わされる。
da=(vb/n1)×(W/v1) ・・・(8)
したがって、ビーム偏向器2で荷電粒子ビーム1に印加すべき電界Eは(V/n1)/daなので、数式(7)、(8)を代入し整理すると、数式(9)のように表わされる。
E=(1/2×m1×vb×v1)/(q×W) ・・・(9)
数式(9)に数式(6)を代入して整理すると、電界Eは数式(10)のように表わされる。
E=m1×d×v12/(2×q×W×(L3−L4)) ・・・(10)
【0028】
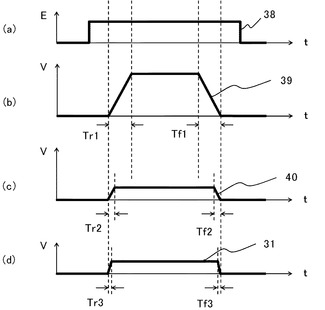
ここで、ビーム偏向器2が従来の偏向キッカー電磁石に比べてパルスの立ち上がり、立ち下りが早くなることを説明する。図7はビーム偏向器のビーム出力波形を説明する図である。図7(a)は偏向機器に入射する荷電粒子ビーム1のビームパルス38を示す図であり、図7(b)は偏向キッカー電磁石に供給される偏向キッカー電源出力波形39を示す図であり、図7(c)は低電圧の偏向キッカー電源出力波形40を示す図であり、図7(d)はビーム偏向器2に入力される電圧パルス31の波形を示す図である。図7(a)の縦軸はエネルギーであり、図7(b)、図7(c)、図7(d)の縦軸は電圧であり、横軸はいずれも時間である。偏向キッカー電磁石は、シンクロトロン等の円形加速器における周回粒子や直進する走行粒子に磁場で力を与え、偏向させる機能を持つ。一回の励磁で軌道を変えるためには数十kVという高電圧を、偏向キッカー電源は整形されたパルスとしてでは無く、放電という形で偏向キッカー電磁石へ印加する。このため、図7(b)に示すように出力波形の立ち上がり、立ち下り部分は大きな傾斜を持ち、偏向キッカー電源出力波形39の立ち上がり時間Tr1、立ち下り時間Tf1はかなり長いものとなっている。
【0029】
したがって、偏向機器として従来の偏向キッカー電磁石を使う場合は、偏向キッカー電源出力波形39の平らになった部分であるフラットトップの中心が周回粒子中心成分と一致するように(同期するように)調整して利用する。しかしながら、フラットトップ幅が周回粒子や走行粒子の時間幅に対し十分広くない場合、偏向キッカー電磁石の立ち下り部分の影響を受ける粒子が存在するので、荷電粒子ビーム1のビームの切れ(遮断特性)が悪い、すなわち漏れビームが発生する原因となる。
【0030】
また、ライン電極板24と異なり、分割しない一枚の電極板で構成される対向した1組の静電電極板の場合も上記と同様に、一回の印加で周回粒子や走行粒子を偏向させなければならず、印加電圧も大きくなるので出力波形の立ち上がり、立ち下り部分の影響を受ける可能性がある。
【0031】
実施の形態1のビーム偏向器2の場合、複数の導体板27毎に荷電粒子ビーム1を偏向するので、1回の偏向角は小さくて良く、印加電圧も小さくできるので、立ち上りや立ち下り部分の影響を上記2ケースと比較して受けにくくすることができる。ここで、図7(c)に示すように、低電圧の偏向キッカー電源出力波形40を考える。低電圧の偏向キッカー電源出力波形40における立ち上がり時間Tr2、立ち下り時間Tf2は、偏向キッカー電源出力波形39の立ち上がり時間Tr1、立ち下り時間Tf1よりも短くなる。さらに、ビーム偏向器2に入力される電圧パルス31は、図7(d)に示すように、ビーム偏向器制御装置7の高速スイッチ12により整形された電圧パルスを使用するので、電圧パルス31の立ち上がり時間Tr3、立ち下り時間Tf3は、立ち上がり時間Tr2、立ち下り時間Tf2より短くできる。したがって、実施の形態1のビーム偏向器2は荷電粒子ビーム1のビームの切れを良くすることができる。
【0032】
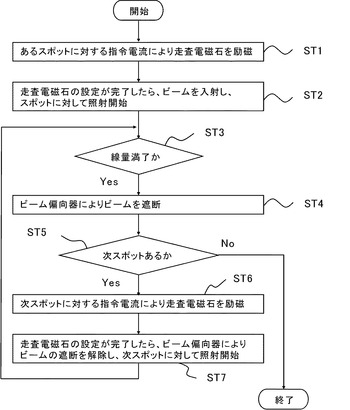
次に粒子線照射装置58の動作を説明する。図8は粒子線照射装置の制御方法を示すフローチャートであり、図9はビーム偏向器のビーム制御を説明する図である。スポットスキャニングでは治療する部位におけるあるスポットに対し、治療計画で定められた線量を照射対象16に荷電粒子ビーム1により照射するので、まず、あるスポットに対する指令電流により走査電磁石3a、3bを励磁する(ステップST1)。具体的には、照射制御装置6は、あるスポットの位置に対応する指令電流をX方向走査電磁石電源4a及びY方向走査電磁石電源4bに送り、X方向走査電磁石電源4a及びY方向走査電磁石電源4bは、X方向走査電磁石3a及びY方向走査電磁石3bを指令電流にしたがって、指令電流で指定された励磁電流により走査電磁石を励磁する。
【0033】
走査電磁石3a、3bの設定が完了したら、例えばX方向走査電磁石3a及びY方向走査電磁石3bから設定完了の信号を受けて、荷電粒子ビーム1を粒子線照射装置58に入射し、ビーム偏向器2を直進ビームとして通過させ、当該スポットに対して照射を開始する(ステップST2)。ビーム偏向器2を直進ビームとして通過させるために、照射制御装置6は、ビーム偏向器制御装置7にビーム遮断解除指令を出す。ビーム偏向器制御装置7は、ビーム遮断解除指令を受けてビーム偏向器2に電圧パルスを出力し、荷電粒子ビーム1を照射系5に導く。
【0034】
照射制御装置6は、当該スポットに治療計画通りの照射が行われたことを、線量モニタ15で検出した照射線量が満了したか(照射線量が計画線量に達したか)を判定する(ステップST3)。満了した場合はビーム偏向器2により荷電粒子ビーム1を遮断する(ステップST4)。具体的には、照射線量が満了した場合に、照射制御装置6は、ビーム偏向器制御装置7にビーム遮断指令を出し、ビーム偏向器制御装置7は、ビーム偏向器2に電圧パルスの出力を停止し(接地レベルの電圧を出力し)、荷電粒子ビーム1を遮断する。
【0035】
照射制御装置6は、次のスポットがあるかを判定し、次のスポットがある場合は、ステップST6に移り、次のスポットがない場合は照射を終了する(ステップST5)。ステップST6にて、次のスポットに対する指令電流により走査電磁石3a、3bを励磁する。ステップST1と同様に動作する。
【0036】
走査電磁石3a、3bの設定が完了したら、ビーム偏向器2により荷電粒子ビーム1の遮断を解除し、当該スポットに対して照射を開始する(ステップST7)。具体的には、照射制御装置6は、走査電磁石3a、3bの設定が完了したら、例えばX方向走査電磁石3a及びY方向走査電磁石3bから設定完了の信号を受けて、ビーム偏向器制御装置7にビーム遮断解除指令を出す。ビーム偏向器制御装置7は、ビーム遮断解除指令を受けてビーム偏向器2に電圧パルスを出力し、荷電粒子ビーム1を照射系5に導き、当該スポットに対して照射を開始する。ステップST7の動作を行った後にステップST3に戻る。以上のように照射対象16における複数層の1つの層(スライス)におけるスポットが終了するまで繰り返す。1つのスライスに対する照射が終了したら、荷電粒子ビーム1のエネルギーを変更し、ステップST1〜ステップST7を実行し、他のスライスに対する照射を行う。
【0037】
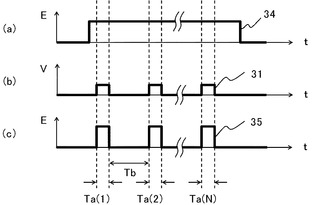
ここで、ビーム偏向器2の電圧パルス31と照射対象16に照射する荷電粒子ビーム1の照射時間の関係を説明する。図9は、ビーム偏向器2のビーム制御を説明する図である。図9(a)は粒子線照射装置58に入射される荷電粒子ビーム1の入射ビームパルス34を示す図であり、図9(b)はビーム偏向器2に入力される電圧パルス31を示す図であり、図9(c)は照射対象16に照射する出射ビームパルス35を示す図である。図9(a)、図9(c)の縦軸はエネルギーであり、図9(b)の縦軸は電圧であり、横軸はいずれも時間である。
【0038】
ビーム偏向器2は、初めに入射ビームパルス34の荷電粒子ビーム1を偏向し、スイッチングされた電圧パルス31が入力されると、荷電粒子ビーム1を直進させる。そして電圧パルス31の出力を停止(接地レベルの電圧を出力)することで、荷電粒子ビーム1を偏向し、遮断する。すなわち、ビーム偏向器2は、電圧パルス31により入射ビームパルス34から出射ビームパルス35を取り出す。この電圧パルス31が入力された時間は、ビーム照射時間Ta(1)、Ta(2)、Ta(N)となる。電圧パルス31が入力されない時間は、ビーム遮断時間Tbとなる。なお、ビーム照射時間の整数1、2、Nはスポットの番号を示している。このように実施の形態1の粒子線照射装置58は、ビーム偏向器2を制御することにより、取り出された出射ビームパルス35のパルス幅(Hパルス幅)をスポットへの照射時間に同期させ、出射ビームパルス35の停止時間(Lレベル幅)を次スポットへの移動時間(準備時間)に同期させることができる。
【0039】
一般的に、粒子線治療装置のサイクロトロン内を周回して加速され、サイクロトロンから出射される荷電粒子ビーム1は、長くても1ms以下のビーム長である。スポットスキャンニング照射方式では、ビーム長が1ms以下の荷電粒子ビーム1をスポット毎に対応する時間のビーム長に切り出して照射する。実施の形態1のビーム偏向器2は、電圧が低電圧化され、高速スイッチ12で高速スイッチングされた電圧パルスが供給される。すなわち、高速スイッチ12により、数nsオーダーの立ち上がり時間Tr3、立ち下り時間Tf3の電圧パルスが供給されるので、100nsオーダーのビーム長で荷電粒子ビーム1を切り出すことができる。実施の形態1の粒子線照射装置58は、スポット毎に、短いビーム長の荷電粒子ビーム1を照射することができる。また、電圧パルス31の立ち上がり時間Tr3、立ち下り時間Tf3を短くできるので、次のスポットに対する照射準備は特に不要であり、次のスポットの位置に荷電粒子ビーム1が照射されるようにX方向走査電磁石3a及びY方向走査電磁石3bの設定が完了したら、即座にビーム遮断を解除して、当該スポットに照射できる。したがって、照射対象16に対する全体の照射が完了するまでの時間(治療時間)を短くすることができる。
【0040】
実施の形態1の粒子線照射装置58は、従来の偏向キッカー電磁石に入力される電圧パルスよりも低電圧で、かつ、立ち上がり時間及び立ち下り時間が短い電圧パルス31をビーム偏向器2に入力するので、従来とは異なりビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。また、ビーム偏向器2に入力する電圧パルス31の電圧をさらに低電圧にする場合は、ビーム偏向器2の導体板27の数を増やすことで、導体板27毎の偏向角度は小さくても、ビーム偏向器2全体の偏向角度を大きく(調整)することができる。ビーム偏向器2に入力する電圧パルス31の電圧をさらに低電圧にすれば、さらに立ち上がり時間及び立ち下り時間を短くできる。したがって、さらにビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。なお、従来の偏向キッカー電磁石に入力される電圧パルスよりも低電圧にすることだけでも、過渡線量を抑制し、照射線量精度を向上させることができる。
【0041】
以上のように実施の形態1の粒子線照射装置58によれば、走査電磁石3a、3bの上流側に配置され、荷電粒子ビーム1の進行方向を電場により変更し、照射対象16への荷電粒子ビーム1の出射及び遮断を行うビーム偏向器2と、荷電粒子ビーム1の進行方向を制御する電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、荷電粒子ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26と、ライン電極板24と電極板26との間に荷電粒子ビーム1が通過する通過領域を有し、複数の導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期である粒子移動基本時間TP0に、複数の導体板27a〜27hの長手方向を伝送する伝送周期である伝送基本時間TV0を同期させた電圧パルス31を出力するので、従来の偏向キッカー電磁石に印加する電圧よりも低電圧の電圧パルスをライン電極板に供給し、電圧パルスの立下り時間を短くでき、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。
【0042】
実施の形態1の粒子線治療装置は、荷電粒子ビーム1を発生させ、この荷電粒子ビーム1を加速器54で加速させるビーム発生装置52と、加速器54により加速された荷電粒子ビーム1を輸送するビーム輸送系59と、ビーム輸送系59で輸送された荷電粒子ビーム1を照射対象9に照射する粒子線照射装置58とを備え、粒子線照射装置58は、走査電磁石3a、3bの上流側に配置され、荷電粒子ビーム1の進行方向を電場により変更し、照射対象16への荷電粒子ビーム1の出射及び遮断を行うビーム偏向器2と、荷電粒子ビーム1の進行方向を制御する電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、荷電粒子ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26と、ライン電極板24と電極板26との間に荷電粒子ビーム1が通過する通過領域を有し、複数の導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期である粒子移動基本時間に、複数の導体板27a〜27hの長手方向を伝送する伝送周期である伝送基本時間を同期させた電圧パルス31を出力するので、照射線量精度の高い粒子線治療を行うことができる。
【0043】
実施の形態2.
図10は本発明の実施の形態2による粒子線照射装置を示す構成図であり、図11は本発明の実施の形態2によるビーム偏向器を示す図である。実施の形態2の粒子線照射装置
60は、実施の形態1の粒子線照射装置58とは、電圧パルス31が入力された場合に荷電粒子ビーム1を偏向するビーム偏向器2(2b)を有する点で異なる。なお、図10において筐体17及びビームダンプ9は断面を示しており、図11において、ライン電極板24及び電極板26は断面を示している。
【0044】
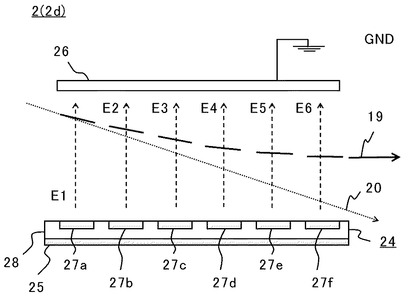
実施の形態2のビーム偏向器2(2b)は、実施の形態1のビーム偏向器2(2a)とは、電極板26が接地レベルにされ(GNDに接続され)点で異なる。ライン電極板24の各導体板27には電圧パルス31が伝送される。電極板26とライン電極板24は、荷電粒子ビーム1の入射ビーム軸に対し平行に設置される。電極板26とライン電極板24との間に作られる各電場E1〜E6により荷電粒子ビーム1は偏向される。電場E1は導体板27aと電極板26間の電場である。同様に電場E2〜E6は、それぞれ導体板27b〜27fと電極板26間の電場である。
【0045】
電極板26とライン電極板24間に電場E1〜E6がない場合は、荷電粒子ビーム1は偏向されず、荷電粒子ビーム1は直進ビーム20となって入射ビーム軸に沿ってビーム偏向器2を通過する。電極板26とライン電極板24間に電場E1〜E6がある場合は、荷電粒子ビーム1は偏向され、荷電粒子ビーム1は偏向ビーム19となって入射ビーム軸からそれてビーム偏向器2を通過する。これによりライン電極板24にスイッチングされた電圧パルス31が伝送されている(Hレベルの電圧が印加されている)場合のみ、荷電粒子ビーム1を偏向させ、それ以外は直進させる機能を、一つのライン電極板24により行うことができる。
【0046】
図4で示したビーム偏向器を上から見た上面図を用いて、ビーム偏向器2bにより荷電粒子ビーム1の進行を制御する方法を詳しく説明する。実施の形態1と同様に荷電粒子ビーム1は複数の荷電粒子30の束なので、粒子30が導体板27を通過する時間と電圧パルス31が導体板27の長手方向を通過する時間とを同期させることで、初めの導体板27aで電圧パルス31の影響を受けた粒子群のみが、次の導体板27b〜27hでも電圧パルス31の影響を受けるようにする。これにより、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群に多段のキック(電極板26からライン電極板24方向の力)を与えたことになり、ビームを偏向することができる。
【0047】
実施の形態2の粒子線照射装置60の動作は、実施の形態1の粒子線照射装置58と同様である。なお、遮断の際には直線ビーム20となり、照射対象16への照射の際、すなわち遮断解除の際には偏向ビーム19となり、実施の形態1の粒子線照射装置58とは逆になっている。
【0048】
実施の形態2の粒子線照射装置60は、ビーム偏向器2bにより荷電粒子ビーム1を遮断する際に、電極板26とライン電極板24との間に電場が形成されないので、照射中に粒子線照射装置60、特にビーム偏向器制御装置7に電源ダウンの異常が発生した場合に、速やかに荷電粒子ビーム1を遮断するようにできるので、粒子線照射装置60の安全装置を複雑にせず、また安全停止制御を複雑にしないようにすることができる。
【0049】
また、実施の形態2の粒子線照射装置60は、荷電粒子ビーム1を照射対象16に照射する照射軸(出射軸)から傾いた入射軸に沿って入射できるので、粒子線照射装置60の照射軸(出射軸)方向の高さを小さくすることができる。
【0050】
実施の形態3.
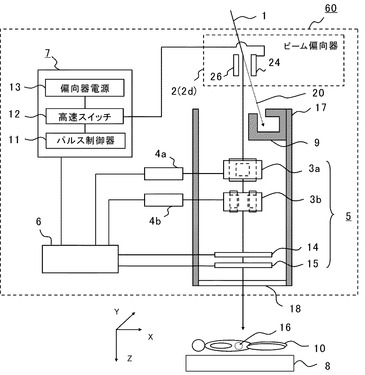
図12は本発明の実施の形態3による粒子線照射装置を示す構成図であり、図13は本発明の実施の形態3によるビーム偏向器を示す図である。実施の形態3の粒子線照射装置58は、実施の形態1の粒子線照射装置58とは、ビーム偏向器2(2c)の配置向きを
変更し、荷電粒子ビーム1がビーム偏向器2(2c)に入射する方向がビーム偏向器2(2c)に対して斜めになっている点で異なる。図12において筐体17及びビームダンプ9は断面を示しており、図13において、ライン電極板24及び電極板26は断面を示している。
【0051】
実施の形態3の粒子線照射装置58は、実施の形態1と同様の効果を奏する。さらに、実施の形態3の粒子線照射装置58は、ビーム偏向器2(2c)を荷電粒子ビーム1に対して斜めに配置できるので、導体板27の数が増え、ライン電極板24の長さが長くなった場合に、ビーム偏向器2(2c)の荷電粒子ビーム1の入射軸方向の長さを小さくすることができる。したがって、粒子線照射装置58の高さ(荷電粒子ビーム1の入射方向の長さ)を実施の形態1に比べて低くすることができる。
【0052】
実施の形態4.
図14は本発明の実施の形態4による粒子線照射装置を示す構成図であり、図15は本発明の実施の形態4によるビーム偏向器を示す図である。実施の形態4の粒子線照射装置60は、実施の形態2の粒子線照射装置608とは、ビーム偏向器2(2d)の配置向きを変更し、荷電粒子ビーム1がビーム偏向器2(2d)に入射する方向がビーム偏向器2(2d)に対して斜めになっている点で異なる。図14において筐体17及びビームダンプ9は断面を示しており、図15において、ライン電極板24及び電極板26は断面を示している。
【0053】
実施の形態4の粒子線照射装置60は、実施の形態2と同様に、ビーム偏向器2dにより荷電粒子ビーム1を遮断する際に、電極板26とライン電極板24との間に電場が形成されないので、照射中に粒子線照射装置60、特にビーム偏向器制御装置7に電源ダウンの異常が発生した場合に、速やかに荷電粒子ビーム1を遮断するようにできるので、粒子線照射装置60の安全装置を複雑にせず、また安全停止制御を複雑にしないようにすることができる。
【0054】
なお、実施の形態1乃至4では、スポットスキャニング照射方式の例で説明したが、ラスタースキャニング照射方式にも適用できる。また、スポットスキャニング照射方式とラスタースキャニング照射方式の両方のメリットを取り入れようとした中間の照射方式(ビームを停止させずにスポット毎に移動させる方式、ハイブリッドスキャニング照射方式と呼ぶことにする)にも適用できる。また、ビームの出射の際に電圧パルスをハイレベルにする例で説明したが、ビームの出射の際に電圧パルスをローレベル(接地レベル)にし、ビーム偏向器2、ビーム偏向器制御装置7を電圧パルスの極性を反転させた構成にしても構わない。
【符号の説明】
【0055】
1…荷電粒子ビーム、2…ビーム偏向器、3a…X方向走査電磁石、3b…Y方向走査電磁石、7…ビーム偏向器制御装置、12…高速スイッチ、13…偏向器電源、15…線量モニタ、16…照射対象、24…ライン電極板、25…裏面導体、26…電極板、27、27a、27b、27c、27d、27e、27f、27g、27h…導体板、28…基板、29…DC電源、31…電圧パルス、51…粒子線治療装置、52…ビーム発生装置、54…シンクロトロン、58、58a、58b…粒子線照射装置、59…ビーム輸送系、60、60a、60b…粒子線照射装置、TV0…伝送基本時間、TP0…粒子移動基本時間。
【技術分野】
【0001】
本発明は、医療用や研究用に用いられる粒子線治療装置に関し、特にスポットスキャニングやラスタースキャニングといった走査型の粒子線治療装置に関する。
【背景技術】
【0002】
一般に粒子線治療装置は、荷電粒子ビームを発生するビーム発生装置と、ビーム発生装置につながれ、発生した荷電粒子ビームを加速する加速器と、加速器で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送するビーム輸送系と、ビーム輸送系の下流に設置され、荷電粒子ビームを照射対象に照射するための粒子線照射装置とを備える。粒子線照射装置には大きく、荷電粒子ビームを散乱体で散乱拡大し、拡大した荷電粒子ビームを照射対象の形状にあわせて照射野を形成するブロード照射方式と、照射対象の形状に合わせるように、細いペンシル状のビームを走査して照射野形成するスキャニング照射方式(スポットスキャニング、ラスタースキャニング等)とがある。
【0003】
ブロード照射方式は、コリメータやボーラスを用いて患部形状に合う照射野を形成する。患部形状に合う照射野を形成し、正常組織への不要な照射を防いでおり、最も汎用的に用いられている、優れた照射方式である。しかし、患者ごとにボーラスを製作したり、患部に合わせてコリメータを変形させたりする必要がある。
【0004】
一方、スキャニング照射方式は、コリメータやボーラスが不要といった自由度の高い照射方式である。しかし、患部以外の正常組織への照射を防ぐこれら部品を用いないため、ブロード照射方式以上に高いビーム照射位置精度が要求され、かつ、荷電粒子ビームによる照射線量を高い精度で制御することが要求される。また、一般的に患部形状は3次元形状となっているので、スキャニング照射方式では、照射対象を複数層(スライス)に分割して、1つの層(スライス)毎に荷電粒子ビームのエネルギーを変更したうえで、照射対象に照射を行うことになり、荷電粒子ビームの出射と遮断を行う必要がある。
【0005】
特許文献1には、荷電粒子ビームの出射と遮断を行うビーム遮断用電磁石をビーム輸送系に配置し、荷電粒子ビームの出射と遮断を行う際に、このビーム遮断用電磁石により発生させる磁場をステップ的に立ち上がり/立ち下がりさせない、すなわち高速にON/OFFさせない場合は、出射ビームが遮断されるまでに時間がかかり、遮断遅延による漏れビーム(ビーム出力波形の立ち上がり、立ち下がり部分に緩い傾斜)が生じることが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−45170号公報(0036段から0040段)
【発明の概要】
【発明が解決しようとする課題】
【0007】
ラスタースキャニング照射方式においては、照射対象の複数層の1つの層(スライス)に荷電粒子ビームを2次元的に走査し照射野を形成した後に荷電粒子ビームを停止して、次の層(スライス)に移動してから荷電粒子ビームを走査して3次元的に照射野を形成する。また、スポットスキャニング照射方式においては、各層内を複数に分割した照射スポット毎に所定の線量に到達したら、荷電粒子ビームを遮断(OFF)してから次の照射スポットに移動して荷電粒子ビームを与える。したがって、ラスタースキャニング照射方式やスポットスキャニング照射方式では、漏れビームが存在する場合は、漏れビームにより漏れ照射が行われ、これによる過渡線量が存在すると照射線量精度が低下してしまう問題があった。特にスポットスキャニング照射方式においては、スポット毎に荷電粒子ビームの出射及び停止を行うため、ビーム漏れによる過渡線量の影響はラスタースキャニング照射方式に比べて非常に大きい。
【0008】
本発明は上記のような課題を解決するためになされたものであり、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることを目的とする。
【課題を解決するための手段】
【0009】
走査電磁石の上流側に配置され、荷電粒子ビームの進行方向を電場により変更し、照射対象への荷電粒子ビームの出射及び遮断を行うビーム偏向器と、荷電粒子ビームの進行方向を制御する電圧パルスをビーム偏向器に出力するビーム偏向器制御装置を備える。ビーム偏向器は、荷電粒子ビームの進行方向に短手方向を並べた複数の導体板が配置されたライン電極板と、ライン電極板に平行に配置された電極板と、ライン電極板と電極板との間に荷電粒子ビームが通過する通過領域を有し、複数の導体板は、長手方向に直列に接続され、インピーダンス整合がされている。ビーム偏向器制御装置は、荷電粒子ビームが複数の導体板の短手方向を通過する通過周期である粒子移動基本時間に、複数の導体板の長手方向を伝送する伝送周期である伝送基本時間を同期させた電圧パルスを出力する。
【発明の効果】
【0010】
本発明に係る粒子線照射装置は、従来の偏向キッカー電磁石に印加する電圧よりも低電圧の電圧パルスをライン電極板に供給し、電圧パルスの立下り時間を短くしたので、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の粒子線治療装置の概略構成図である。
【図2】図1の粒子線照射装置を示す構成図である。
【図3】本発明の実施の形態1によるビーム偏向器を示す図である。
【図4】図4のビーム偏向器を上から見た上面図である。
【図5】図4のビーム偏向器のマイクロストリップラインを説明する図である。
【図6】図3のビーム偏向器に印加する電界Eの計算条件を説明する図である。
【図7】図2のビーム偏向器のビーム出力波形を説明する図である。
【図8】図1の粒子線照射装置の制御方法を示すフローチャートである。
【図9】図2のビーム偏向器のビーム制御を説明する図である。
【図10】本発明の実施の形態2による粒子線照射装置を示す構成図である。
【図11】本発明の実施の形態2によるビーム偏向器を示す図である。
【図12】本発明の実施の形態3による粒子線照射装置を示す構成図である。
【図13】本発明の実施の形態3によるビーム偏向器を示す図である。
【図14】本発明の実施の形態4による粒子線照射装置を示す構成図である。
【図15】本発明の実施の形態4によるビーム偏向器を示す図である。
【発明を実施するための形態】
【0012】
実施の形態1.
図1は本発明の粒子線治療装置の概略構成図である。粒子線治療装置51は、ビーム発生装置52と、ビーム輸送系59と、粒子線照射装置58a、58b(又は60a、60b)とを備える。ビーム発生装置52は、イオン源(図示せず)と、前段加速器53と、シンクロトロン54とを有する。粒子線照射装置58b(60b)は回転ガントリ(図示せず)に設置される。粒子線照射装置58a(60a)は回転ガントリを有しない治療室
に設置される。ビーム輸送系59の役割はシンクロトロン54と粒子線照射装置58a、58bの連絡にある。ビーム輸送系59の一部は回転ガントリ(図示せず)に設置され、その部分には複数の偏向電磁石55a、55b、55cを有する。
【0013】
イオン源で発生した陽子線等の粒子線である荷電粒子ビーム1は、前段加速器53で加速され、シンクロトロン54に入射される。荷電粒子ビーム1は、所定のエネルギーまで加速される。シンクロトロン54から出射された荷電粒子ビーム1は、ビーム輸送系59を経て粒子線照射装置58a(60a)、58b(60b)に輸送される。粒子線照射装置58a(60a)、58b(60b)は荷電粒子ビームを治療台8に固定された患者10の照射対象16(図2参照)に照射する。
【0014】
図2は本発明の実施の形態1による粒子線照射装置を示す構成図である。ビーム発生装置52で発生され、所定のエネルギーまで加速された荷電粒子ビーム1は、ビーム輸送系59を経由し、粒子線照射装置58へと導かれる。粒子線照射装置58は、荷電粒子ビーム1に垂直な方向であるX方向及びY方向に荷電粒子ビーム1を走査するX方向走査電磁石3a及びY方向走査電磁石3bと、位置モニタ14と、線量モニタ15と、X方向走査電磁石電源4aと、Y方向走査電磁石電源4bと、ビーム偏向器2と、ビーム偏向器制御装置7と、粒子線照射装置58の照射系5及びビーム偏向器制御装置7を制御する照射制御装置6とを備える。X方向走査電磁石3a、Y方向走査電磁石3b、位置モニタ14、線量モニタ15は照射系5を構成する。照射系5は筐体17に配置され、照射系5の上側である筐体17の上側にビームダンプ9が配置される。ビームダンプ9は鉛等の重金属材料を用いて形成される。ビーム偏向器制御装置7は、パルス制御器11と、高速スイッチ(スイッチ)12と、偏向器電源13を有する。なお、高速スイッチの例として、例えばBEHLKE社製の高電圧・高速半導体スイッチ等を用いることができる。また、荷電粒子ビーム1の進行方向はZ方向である。また、図2において筐体17及びビームダンプ9は断面を示している。
【0015】
ビーム偏向器2は、ビーム偏向器制御装置7により制御される。ビーム偏向器2は、粒子線照射装置58に入射される粒子線ビーム1の進行方向を電場により変更し、粒子線ビーム1を所定の照射期間に照射系5へ導き、所定の照射期間以外には粒子線ビーム1をビームダンプ9の側に導き、照射系5への粒子線ビーム1を遮断する。実施の形態1では粒子線ビーム1を偏向し、偏向された偏向ビーム19をビームダンプ9に導き、照射系5への粒子線ビーム1を遮断する。X方向走査電磁石3aは荷電粒子ビーム1をX方向に走査する走査電磁石であり、Y方向走査電磁石3bは荷電粒子ビーム1をY方向に走査する走査電磁石である。X方向走査電磁石3a及びY方向走査電磁石3bは、荷電粒子ビーム1を走査する。X方向走査電磁石電源4aは、X方向走査電磁石3aへ荷電粒子ビーム1を走査するための励磁電流を供給する。Y方向走査電磁石電源4bは、Y方向走査電磁石3bへ荷電粒子ビーム1を走査するための励磁電流を供給する。
【0016】
線量モニタ15は荷電粒子ビーム1の照射線量を検出する。照射制御装置6は、図示しない治療計画装置で作成された治療計画データに基づいて、照射対象16における荷電粒子ビーム1の照射位置を制御し、線量モニタ15で測定され、図示しない線量データ変換器でデジタルデータに変換された線量が目標線量に達するとビーム偏向器制御装置7に指令(ビーム遮断指令)を出し、ビーム偏向器2が荷電粒子ビーム1を遮断する。X方向走査電磁石電源4a及びY方向走査電磁石電源4bは、照射制御装置6から出力されたX方向走査電磁石3a及びY方向走査電磁石3bへの制御入力(指令)に基づいてX方向走査電磁石3a及びY方向走査電磁石3bの励磁電流を変化させる。
【0017】
ビーム偏向器制御装置7は、偏向器電源13が供給する電圧を高速スイッチ12によってパルス状にスイッチングを行い、すなわち、パルス状に形成する。偏向器電源13が供
給する電圧は形成したパルスのハイレベルの電圧になる。この際、ビーム偏向器制御装置7のパルス制御器11は、高速スイッチ12がスイッチする間隔及び周期を制御する。粒子線照射装置58に入射する荷電粒子ビーム1は、ビーム偏向器2、照射系5を経て、筐体17の下側に配置される照射窓18から出射され、治療台8に固定された患者10の照射対象16に照射される。
【0018】
ビーム偏向器2を詳しく説明する。図3は本発明の実施の形態1によるビーム偏向器を示す図であり、図4はビーム偏向器を上から見た上面図であり、図5はビーム偏向器のマイクロストリップラインを説明する図である。なお、図3では導体板27を6つ配置した例であり、図4及び5は、導体板27を8つ配置した例を示している。ビーム偏向器2は、マイクロストリップライン式静電電極板24(以降、単にライン電極板と称する)とライン電極板24に対向する電極板26を有する。ライン電極板24は、GFRP(glass fiber reinforced plastics)板等の基板28の表面に複数の銅板等の導体板27を並行に配置し、基板28の裏面に銅板等の裏面導体25を配置したものである。裏面導体25は接地レベルにされ(GNDに接続され)、電極板26はDC電源(直流電源)29に接続され、ライン電極板24の各導体板27には電圧パルス31が伝送される。電極板26とライン電極板24は、荷電粒子ビーム1の入射ビーム軸に対し平行に設置される。ビーム偏向器2は、ライン電極板と電極板との間に荷電粒子ビームが通過する通過領域を有する。ライン電極板24にパルス電圧31が入力されない場合に、すなわち接地レベルの電圧が印加された場合に、電極板26とライン電極板24との間に作られる各電場E1〜E6(方向は電極板26からライン電極板24)により荷電粒子ビーム1は偏向される。ライン電極板24にパルス電圧31が入力された場合は、電極板26とライン電極板24との間に作られる各電場E1〜E6が相殺するように動作させることで、荷電粒子ビーム1は直進する。電場E1は導体板27aと電極板26間の電場である。同様に電場E2〜E6は、それぞれ導体板27b〜27fと電極板26間の電場である。なお、図3において、ライン電極板24及び電極板26は断面を示している。
【0019】
ライン電極板24にパルス電圧31が入力されない場合、すなわち接地レベルの電圧が印加された場合は、荷電粒子ビーム1は偏向され、荷電粒子ビーム1は偏向ビーム19となって入射ビーム軸からそれてビーム偏向器2を通過する。ライン電極板24にパルス電圧31が入力された場合は、荷電粒子ビーム1は偏向されず、荷電粒子ビーム1は直進ビーム20となって入射ビーム軸に沿ってビーム偏向器2を通過する。これによりライン電極板24にスイッチングされた電圧パルス31が伝送されている場合のみ、荷電粒子ビーム1を直進させ、それ以外は偏向させる機能を、一つのライン電極板24により行うことができる。
【0020】
ライン電極板24は、図5に示すように、幅W、長さL1(図4参照)、厚さt1の導体板27a〜27hが、厚さt2の基板28に露出して配置される。ライン電極板24はマイクロストリップラインの構造を備えるので、マイクロストリップラインのインピーダンスマッチング(インピーダンス整合)の原理により、導体板27a〜27hのそれぞれは、所定のインピーダンス(例えば50Ω)を有する。また、図4に示すように導体板27a〜27hはそれぞれ間隔Sだけ間隔を空けて配置される。ここでマイクロストリップラインの特性インピーダンスZ0は、基板28の比誘電率をεrとすると数式(1)のように表わせる。
Z0=87/√(εr+1.41)×ln(A/B) ・・・(1)
なお、A及びBは、それぞれ数式(2)及び数式(3)のように表わせる。
A=5.98×(t2−t1) ・・・(2)
B=0.8×W×t1 ・・・(3)
比誘電率をεr、幅W、厚さt1、厚さt2を選択することで、所定のインピーダンス
(例えば50Ω)を得ることができる。
【0021】
図4に示すように、ライン電極板24の8つの導体板27a〜27hは、それぞれ遅延配線32(32a〜32g)で接続され、1本の伝送路を構成するように直列接続される。導体板27aには電圧パルス31を導入する入力配線37が接続され、導体板27hの終端には一端が接地された終端抵抗33が接続される。ライン電極板24の各導体板27a〜27hは所定のインピーダンス(例えば50Ω)を有し、終端でインピーダンスマッチング用の終端抵抗33を介して接地されるので、ライン電極板24に入力されるスイッチングされた電圧パルス31は反射することなく、ライン電極板24内を伝送することができる。なお、遅延配線32(32a〜32g)と終端抵抗33のインピーダンスは導体板27a〜27hのインピーダンスと等しくする。
【0022】
また、遅延配線32a〜32gは、基板28にプリント配線のようにリソグラフィ技術や多層配線技術を用いて形成してもよい。遅延配線32a〜32gを基板28に形成することで、遅延配線32a〜32gの半田接続作業等が不要となり、ライン電極板24でのインピーダンス調整を容易に行うことができる。
【0023】
ビーム偏向器2により荷電粒子ビーム1の進行を制御する方法を詳しく説明する。荷電粒子ビーム1は複数の荷電粒子30(適宜、粒子30と称する)の束なので、1つの粒子30が導体板27の短手方向(短辺)を通過する時間と電圧パルス31が導体板27の長手方向(長辺)を通過する時間とが後述する所定の同期関係になるようにライン電極板24を構成することで、初めの導体板27aで電圧パルス31の影響を受けた粒子群のみが、次の導体板27b〜27hでも電圧パルス31の影響を受けるようにする。これにより、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群は電場Eの影響を受けなくなり、ビームを直進させることができる。
【0024】
粒子30はライン電極板24の中央を通過する場合を考える。ビームの中心成分に注目し、ビームの中心成分がライン電極板24を通るように位置調整し、使用するからである。粒子30の速度をv1とすると、粒子30が導体板27を通過する時間はW/v1である。粒子30が導体板27の短手方向(短辺)を通過し、次の導体板27に到達する時間(粒子移動基本時間)TP0は、(W+S)/v1となる。所定の伝送特性を有する導体板27を伝送する電圧パルス31の速度をv2とすると、電圧パルス31が導体板27の長手方向(長辺)を通過する時間は、L1/v2である。また、遅延配線32の伝搬遅延時間TDから、導体板27の長手方向の長さに相当する実効長L2を導入する。実効長L2はv2×TDで計算できる。初めの導体板27を通過して遅延配線32を通過した時間、すなわち初めの導体板27を通過して次の導体板27に到達する時間(伝送基本時間)TV0は、(L1+L2)/v2となる。粒子移動基本時間TP0と伝送基本時間TV0とが一致するようにライン電極板24を構成する。このようにすることで、上述の所定の同期関係を実現でき、上述したように、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群は電場Eの影響を受けなくなり、ビームを直進させることができる。なお、粒子移動基本時間TP0は荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期であり、伝送基本時間TV0は複数の導体板27a〜27hの長手方向を伝送する伝送周期である。
【0025】
上述の粒子移動基本時間TP0と伝送基本時間TV0とが一致する所定の同期関係を実現する上で、必要となる粒子30の速度v1と電圧パルス31の伝送速度v2について説明する。粒子30の速度v1と電圧パルス31の伝送速度v2は、それぞれ数式(4)及び数式(5)のように表わせる。
v1=c×√(1−(T/(T+K))2) ・・・(4)
v2=1/√(L×C) ・・・(5)
ここで、Kは粒子30のエネルギー(MeV)、cは光速、Tは陽子の静止エネルギー、Lは導体板27のインダクタンス、Cは導体板27の電気容量である。
【0026】
ビーム偏向器2で荷電粒子ビーム1に印加する電界Eについて説明する。図6は電界Eを計算するための条件を説明する図である。21は荷電粒子ビーム1がビーム偏向器2を通過する直進ビーム20に平行な直進ビーム平行軸である。点Pは荷電粒子ビーム1の偏向距離dを評価するための評価点であり、例えばビームダンプ9の内部点である。ライン電極板24の長さをL4とし、ライン電極板24の前端から評価点Pまでの直進ビーム平行軸上での距離をL3とする。ライン電極板24の終端において、荷電粒子30は直進ビーム平行軸方向の速度成分はv1であるが、荷電粒子30は電界Eの影響を受けて、ライン電極板24の垂直方向成分を得る。この荷電粒子30の速度における垂直方向成分(垂直方向速度成分)をvbとする。また、偏向ビーム軌道22と直進ビーム平行軸21の角度をθとする。荷電粒子30の垂直方向速度成分vbは、v1×tanθなので、数式(6)のように表わされる。
vb=v1×d/(L3−L4) ・・・(6)
【0027】
荷電粒子30がライン電極板24の終端において、垂直方向速度成分vbの速度を持つために必要な電位差Vを考える。陽子の質量をm1、電荷をqとすると、ライン電極板24の終端において、運動エネルギーは1/2×m1×vb2であり、電位差Vによって荷電粒子30が得るエネルギーはq×Vなので、電位差Vは数式(7)のように表わされる。
V=(1/2×m1×vb2)/q ・・・(7)
ライン電極板24の終端において必要な電位差Vは、ライン電極板24のn1本の導体板27のそれぞれで分担することになる。すなわち、荷電粒子30が導体板27の1本当たりV/n1の電位差を受けるように、ライン電極板24のn1本の導体板27と電極板26間に電界Eを発生させればよい。導体板27の幅Wを通過する場合に、その幅Wを通過する時間はv1/Wなので、ライン電極板24の垂直方向の移動距離daは、数式(8)のように表わされる。
da=(vb/n1)×(W/v1) ・・・(8)
したがって、ビーム偏向器2で荷電粒子ビーム1に印加すべき電界Eは(V/n1)/daなので、数式(7)、(8)を代入し整理すると、数式(9)のように表わされる。
E=(1/2×m1×vb×v1)/(q×W) ・・・(9)
数式(9)に数式(6)を代入して整理すると、電界Eは数式(10)のように表わされる。
E=m1×d×v12/(2×q×W×(L3−L4)) ・・・(10)
【0028】
ここで、ビーム偏向器2が従来の偏向キッカー電磁石に比べてパルスの立ち上がり、立ち下りが早くなることを説明する。図7はビーム偏向器のビーム出力波形を説明する図である。図7(a)は偏向機器に入射する荷電粒子ビーム1のビームパルス38を示す図であり、図7(b)は偏向キッカー電磁石に供給される偏向キッカー電源出力波形39を示す図であり、図7(c)は低電圧の偏向キッカー電源出力波形40を示す図であり、図7(d)はビーム偏向器2に入力される電圧パルス31の波形を示す図である。図7(a)の縦軸はエネルギーであり、図7(b)、図7(c)、図7(d)の縦軸は電圧であり、横軸はいずれも時間である。偏向キッカー電磁石は、シンクロトロン等の円形加速器における周回粒子や直進する走行粒子に磁場で力を与え、偏向させる機能を持つ。一回の励磁で軌道を変えるためには数十kVという高電圧を、偏向キッカー電源は整形されたパルスとしてでは無く、放電という形で偏向キッカー電磁石へ印加する。このため、図7(b)に示すように出力波形の立ち上がり、立ち下り部分は大きな傾斜を持ち、偏向キッカー電源出力波形39の立ち上がり時間Tr1、立ち下り時間Tf1はかなり長いものとなっている。
【0029】
したがって、偏向機器として従来の偏向キッカー電磁石を使う場合は、偏向キッカー電源出力波形39の平らになった部分であるフラットトップの中心が周回粒子中心成分と一致するように(同期するように)調整して利用する。しかしながら、フラットトップ幅が周回粒子や走行粒子の時間幅に対し十分広くない場合、偏向キッカー電磁石の立ち下り部分の影響を受ける粒子が存在するので、荷電粒子ビーム1のビームの切れ(遮断特性)が悪い、すなわち漏れビームが発生する原因となる。
【0030】
また、ライン電極板24と異なり、分割しない一枚の電極板で構成される対向した1組の静電電極板の場合も上記と同様に、一回の印加で周回粒子や走行粒子を偏向させなければならず、印加電圧も大きくなるので出力波形の立ち上がり、立ち下り部分の影響を受ける可能性がある。
【0031】
実施の形態1のビーム偏向器2の場合、複数の導体板27毎に荷電粒子ビーム1を偏向するので、1回の偏向角は小さくて良く、印加電圧も小さくできるので、立ち上りや立ち下り部分の影響を上記2ケースと比較して受けにくくすることができる。ここで、図7(c)に示すように、低電圧の偏向キッカー電源出力波形40を考える。低電圧の偏向キッカー電源出力波形40における立ち上がり時間Tr2、立ち下り時間Tf2は、偏向キッカー電源出力波形39の立ち上がり時間Tr1、立ち下り時間Tf1よりも短くなる。さらに、ビーム偏向器2に入力される電圧パルス31は、図7(d)に示すように、ビーム偏向器制御装置7の高速スイッチ12により整形された電圧パルスを使用するので、電圧パルス31の立ち上がり時間Tr3、立ち下り時間Tf3は、立ち上がり時間Tr2、立ち下り時間Tf2より短くできる。したがって、実施の形態1のビーム偏向器2は荷電粒子ビーム1のビームの切れを良くすることができる。
【0032】
次に粒子線照射装置58の動作を説明する。図8は粒子線照射装置の制御方法を示すフローチャートであり、図9はビーム偏向器のビーム制御を説明する図である。スポットスキャニングでは治療する部位におけるあるスポットに対し、治療計画で定められた線量を照射対象16に荷電粒子ビーム1により照射するので、まず、あるスポットに対する指令電流により走査電磁石3a、3bを励磁する(ステップST1)。具体的には、照射制御装置6は、あるスポットの位置に対応する指令電流をX方向走査電磁石電源4a及びY方向走査電磁石電源4bに送り、X方向走査電磁石電源4a及びY方向走査電磁石電源4bは、X方向走査電磁石3a及びY方向走査電磁石3bを指令電流にしたがって、指令電流で指定された励磁電流により走査電磁石を励磁する。
【0033】
走査電磁石3a、3bの設定が完了したら、例えばX方向走査電磁石3a及びY方向走査電磁石3bから設定完了の信号を受けて、荷電粒子ビーム1を粒子線照射装置58に入射し、ビーム偏向器2を直進ビームとして通過させ、当該スポットに対して照射を開始する(ステップST2)。ビーム偏向器2を直進ビームとして通過させるために、照射制御装置6は、ビーム偏向器制御装置7にビーム遮断解除指令を出す。ビーム偏向器制御装置7は、ビーム遮断解除指令を受けてビーム偏向器2に電圧パルスを出力し、荷電粒子ビーム1を照射系5に導く。
【0034】
照射制御装置6は、当該スポットに治療計画通りの照射が行われたことを、線量モニタ15で検出した照射線量が満了したか(照射線量が計画線量に達したか)を判定する(ステップST3)。満了した場合はビーム偏向器2により荷電粒子ビーム1を遮断する(ステップST4)。具体的には、照射線量が満了した場合に、照射制御装置6は、ビーム偏向器制御装置7にビーム遮断指令を出し、ビーム偏向器制御装置7は、ビーム偏向器2に電圧パルスの出力を停止し(接地レベルの電圧を出力し)、荷電粒子ビーム1を遮断する。
【0035】
照射制御装置6は、次のスポットがあるかを判定し、次のスポットがある場合は、ステップST6に移り、次のスポットがない場合は照射を終了する(ステップST5)。ステップST6にて、次のスポットに対する指令電流により走査電磁石3a、3bを励磁する。ステップST1と同様に動作する。
【0036】
走査電磁石3a、3bの設定が完了したら、ビーム偏向器2により荷電粒子ビーム1の遮断を解除し、当該スポットに対して照射を開始する(ステップST7)。具体的には、照射制御装置6は、走査電磁石3a、3bの設定が完了したら、例えばX方向走査電磁石3a及びY方向走査電磁石3bから設定完了の信号を受けて、ビーム偏向器制御装置7にビーム遮断解除指令を出す。ビーム偏向器制御装置7は、ビーム遮断解除指令を受けてビーム偏向器2に電圧パルスを出力し、荷電粒子ビーム1を照射系5に導き、当該スポットに対して照射を開始する。ステップST7の動作を行った後にステップST3に戻る。以上のように照射対象16における複数層の1つの層(スライス)におけるスポットが終了するまで繰り返す。1つのスライスに対する照射が終了したら、荷電粒子ビーム1のエネルギーを変更し、ステップST1〜ステップST7を実行し、他のスライスに対する照射を行う。
【0037】
ここで、ビーム偏向器2の電圧パルス31と照射対象16に照射する荷電粒子ビーム1の照射時間の関係を説明する。図9は、ビーム偏向器2のビーム制御を説明する図である。図9(a)は粒子線照射装置58に入射される荷電粒子ビーム1の入射ビームパルス34を示す図であり、図9(b)はビーム偏向器2に入力される電圧パルス31を示す図であり、図9(c)は照射対象16に照射する出射ビームパルス35を示す図である。図9(a)、図9(c)の縦軸はエネルギーであり、図9(b)の縦軸は電圧であり、横軸はいずれも時間である。
【0038】
ビーム偏向器2は、初めに入射ビームパルス34の荷電粒子ビーム1を偏向し、スイッチングされた電圧パルス31が入力されると、荷電粒子ビーム1を直進させる。そして電圧パルス31の出力を停止(接地レベルの電圧を出力)することで、荷電粒子ビーム1を偏向し、遮断する。すなわち、ビーム偏向器2は、電圧パルス31により入射ビームパルス34から出射ビームパルス35を取り出す。この電圧パルス31が入力された時間は、ビーム照射時間Ta(1)、Ta(2)、Ta(N)となる。電圧パルス31が入力されない時間は、ビーム遮断時間Tbとなる。なお、ビーム照射時間の整数1、2、Nはスポットの番号を示している。このように実施の形態1の粒子線照射装置58は、ビーム偏向器2を制御することにより、取り出された出射ビームパルス35のパルス幅(Hパルス幅)をスポットへの照射時間に同期させ、出射ビームパルス35の停止時間(Lレベル幅)を次スポットへの移動時間(準備時間)に同期させることができる。
【0039】
一般的に、粒子線治療装置のサイクロトロン内を周回して加速され、サイクロトロンから出射される荷電粒子ビーム1は、長くても1ms以下のビーム長である。スポットスキャンニング照射方式では、ビーム長が1ms以下の荷電粒子ビーム1をスポット毎に対応する時間のビーム長に切り出して照射する。実施の形態1のビーム偏向器2は、電圧が低電圧化され、高速スイッチ12で高速スイッチングされた電圧パルスが供給される。すなわち、高速スイッチ12により、数nsオーダーの立ち上がり時間Tr3、立ち下り時間Tf3の電圧パルスが供給されるので、100nsオーダーのビーム長で荷電粒子ビーム1を切り出すことができる。実施の形態1の粒子線照射装置58は、スポット毎に、短いビーム長の荷電粒子ビーム1を照射することができる。また、電圧パルス31の立ち上がり時間Tr3、立ち下り時間Tf3を短くできるので、次のスポットに対する照射準備は特に不要であり、次のスポットの位置に荷電粒子ビーム1が照射されるようにX方向走査電磁石3a及びY方向走査電磁石3bの設定が完了したら、即座にビーム遮断を解除して、当該スポットに照射できる。したがって、照射対象16に対する全体の照射が完了するまでの時間(治療時間)を短くすることができる。
【0040】
実施の形態1の粒子線照射装置58は、従来の偏向キッカー電磁石に入力される電圧パルスよりも低電圧で、かつ、立ち上がり時間及び立ち下り時間が短い電圧パルス31をビーム偏向器2に入力するので、従来とは異なりビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。また、ビーム偏向器2に入力する電圧パルス31の電圧をさらに低電圧にする場合は、ビーム偏向器2の導体板27の数を増やすことで、導体板27毎の偏向角度は小さくても、ビーム偏向器2全体の偏向角度を大きく(調整)することができる。ビーム偏向器2に入力する電圧パルス31の電圧をさらに低電圧にすれば、さらに立ち上がり時間及び立ち下り時間を短くできる。したがって、さらにビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。なお、従来の偏向キッカー電磁石に入力される電圧パルスよりも低電圧にすることだけでも、過渡線量を抑制し、照射線量精度を向上させることができる。
【0041】
以上のように実施の形態1の粒子線照射装置58によれば、走査電磁石3a、3bの上流側に配置され、荷電粒子ビーム1の進行方向を電場により変更し、照射対象16への荷電粒子ビーム1の出射及び遮断を行うビーム偏向器2と、荷電粒子ビーム1の進行方向を制御する電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、荷電粒子ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26と、ライン電極板24と電極板26との間に荷電粒子ビーム1が通過する通過領域を有し、複数の導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期である粒子移動基本時間TP0に、複数の導体板27a〜27hの長手方向を伝送する伝送周期である伝送基本時間TV0を同期させた電圧パルス31を出力するので、従来の偏向キッカー電磁石に印加する電圧よりも低電圧の電圧パルスをライン電極板に供給し、電圧パルスの立下り時間を短くでき、スキャニング照射方式におけるビーム遮断の際の過渡線量を抑制し、照射線量精度を向上させることができる。
【0042】
実施の形態1の粒子線治療装置は、荷電粒子ビーム1を発生させ、この荷電粒子ビーム1を加速器54で加速させるビーム発生装置52と、加速器54により加速された荷電粒子ビーム1を輸送するビーム輸送系59と、ビーム輸送系59で輸送された荷電粒子ビーム1を照射対象9に照射する粒子線照射装置58とを備え、粒子線照射装置58は、走査電磁石3a、3bの上流側に配置され、荷電粒子ビーム1の進行方向を電場により変更し、照射対象16への荷電粒子ビーム1の出射及び遮断を行うビーム偏向器2と、荷電粒子ビーム1の進行方向を制御する電圧パルス31をビーム偏向器2に出力するビーム偏向器制御装置7を備え、ビーム偏向器2は、荷電粒子ビーム1の進行方向に短手方向を並べた複数の導体板27a〜27hが配置されたライン電極板24と、ライン電極板24に平行に配置された電極板26と、ライン電極板24と電極板26との間に荷電粒子ビーム1が通過する通過領域を有し、複数の導体板27a〜27hは、長手方向に直列に接続され、インピーダンス整合がされており、ビーム偏向器制御装置7は、荷電粒子ビーム1が複数の導体板27a〜27hの短手方向を通過する通過周期である粒子移動基本時間に、複数の導体板27a〜27hの長手方向を伝送する伝送周期である伝送基本時間を同期させた電圧パルス31を出力するので、照射線量精度の高い粒子線治療を行うことができる。
【0043】
実施の形態2.
図10は本発明の実施の形態2による粒子線照射装置を示す構成図であり、図11は本発明の実施の形態2によるビーム偏向器を示す図である。実施の形態2の粒子線照射装置
60は、実施の形態1の粒子線照射装置58とは、電圧パルス31が入力された場合に荷電粒子ビーム1を偏向するビーム偏向器2(2b)を有する点で異なる。なお、図10において筐体17及びビームダンプ9は断面を示しており、図11において、ライン電極板24及び電極板26は断面を示している。
【0044】
実施の形態2のビーム偏向器2(2b)は、実施の形態1のビーム偏向器2(2a)とは、電極板26が接地レベルにされ(GNDに接続され)点で異なる。ライン電極板24の各導体板27には電圧パルス31が伝送される。電極板26とライン電極板24は、荷電粒子ビーム1の入射ビーム軸に対し平行に設置される。電極板26とライン電極板24との間に作られる各電場E1〜E6により荷電粒子ビーム1は偏向される。電場E1は導体板27aと電極板26間の電場である。同様に電場E2〜E6は、それぞれ導体板27b〜27fと電極板26間の電場である。
【0045】
電極板26とライン電極板24間に電場E1〜E6がない場合は、荷電粒子ビーム1は偏向されず、荷電粒子ビーム1は直進ビーム20となって入射ビーム軸に沿ってビーム偏向器2を通過する。電極板26とライン電極板24間に電場E1〜E6がある場合は、荷電粒子ビーム1は偏向され、荷電粒子ビーム1は偏向ビーム19となって入射ビーム軸からそれてビーム偏向器2を通過する。これによりライン電極板24にスイッチングされた電圧パルス31が伝送されている(Hレベルの電圧が印加されている)場合のみ、荷電粒子ビーム1を偏向させ、それ以外は直進させる機能を、一つのライン電極板24により行うことができる。
【0046】
図4で示したビーム偏向器を上から見た上面図を用いて、ビーム偏向器2bにより荷電粒子ビーム1の進行を制御する方法を詳しく説明する。実施の形態1と同様に荷電粒子ビーム1は複数の荷電粒子30の束なので、粒子30が導体板27を通過する時間と電圧パルス31が導体板27の長手方向を通過する時間とを同期させることで、初めの導体板27aで電圧パルス31の影響を受けた粒子群のみが、次の導体板27b〜27hでも電圧パルス31の影響を受けるようにする。これにより、ライン電極板24に入射された時点で、スイッチングされた電圧パルス幅(時間幅)分の粒子群に多段のキック(電極板26からライン電極板24方向の力)を与えたことになり、ビームを偏向することができる。
【0047】
実施の形態2の粒子線照射装置60の動作は、実施の形態1の粒子線照射装置58と同様である。なお、遮断の際には直線ビーム20となり、照射対象16への照射の際、すなわち遮断解除の際には偏向ビーム19となり、実施の形態1の粒子線照射装置58とは逆になっている。
【0048】
実施の形態2の粒子線照射装置60は、ビーム偏向器2bにより荷電粒子ビーム1を遮断する際に、電極板26とライン電極板24との間に電場が形成されないので、照射中に粒子線照射装置60、特にビーム偏向器制御装置7に電源ダウンの異常が発生した場合に、速やかに荷電粒子ビーム1を遮断するようにできるので、粒子線照射装置60の安全装置を複雑にせず、また安全停止制御を複雑にしないようにすることができる。
【0049】
また、実施の形態2の粒子線照射装置60は、荷電粒子ビーム1を照射対象16に照射する照射軸(出射軸)から傾いた入射軸に沿って入射できるので、粒子線照射装置60の照射軸(出射軸)方向の高さを小さくすることができる。
【0050】
実施の形態3.
図12は本発明の実施の形態3による粒子線照射装置を示す構成図であり、図13は本発明の実施の形態3によるビーム偏向器を示す図である。実施の形態3の粒子線照射装置58は、実施の形態1の粒子線照射装置58とは、ビーム偏向器2(2c)の配置向きを
変更し、荷電粒子ビーム1がビーム偏向器2(2c)に入射する方向がビーム偏向器2(2c)に対して斜めになっている点で異なる。図12において筐体17及びビームダンプ9は断面を示しており、図13において、ライン電極板24及び電極板26は断面を示している。
【0051】
実施の形態3の粒子線照射装置58は、実施の形態1と同様の効果を奏する。さらに、実施の形態3の粒子線照射装置58は、ビーム偏向器2(2c)を荷電粒子ビーム1に対して斜めに配置できるので、導体板27の数が増え、ライン電極板24の長さが長くなった場合に、ビーム偏向器2(2c)の荷電粒子ビーム1の入射軸方向の長さを小さくすることができる。したがって、粒子線照射装置58の高さ(荷電粒子ビーム1の入射方向の長さ)を実施の形態1に比べて低くすることができる。
【0052】
実施の形態4.
図14は本発明の実施の形態4による粒子線照射装置を示す構成図であり、図15は本発明の実施の形態4によるビーム偏向器を示す図である。実施の形態4の粒子線照射装置60は、実施の形態2の粒子線照射装置608とは、ビーム偏向器2(2d)の配置向きを変更し、荷電粒子ビーム1がビーム偏向器2(2d)に入射する方向がビーム偏向器2(2d)に対して斜めになっている点で異なる。図14において筐体17及びビームダンプ9は断面を示しており、図15において、ライン電極板24及び電極板26は断面を示している。
【0053】
実施の形態4の粒子線照射装置60は、実施の形態2と同様に、ビーム偏向器2dにより荷電粒子ビーム1を遮断する際に、電極板26とライン電極板24との間に電場が形成されないので、照射中に粒子線照射装置60、特にビーム偏向器制御装置7に電源ダウンの異常が発生した場合に、速やかに荷電粒子ビーム1を遮断するようにできるので、粒子線照射装置60の安全装置を複雑にせず、また安全停止制御を複雑にしないようにすることができる。
【0054】
なお、実施の形態1乃至4では、スポットスキャニング照射方式の例で説明したが、ラスタースキャニング照射方式にも適用できる。また、スポットスキャニング照射方式とラスタースキャニング照射方式の両方のメリットを取り入れようとした中間の照射方式(ビームを停止させずにスポット毎に移動させる方式、ハイブリッドスキャニング照射方式と呼ぶことにする)にも適用できる。また、ビームの出射の際に電圧パルスをハイレベルにする例で説明したが、ビームの出射の際に電圧パルスをローレベル(接地レベル)にし、ビーム偏向器2、ビーム偏向器制御装置7を電圧パルスの極性を反転させた構成にしても構わない。
【符号の説明】
【0055】
1…荷電粒子ビーム、2…ビーム偏向器、3a…X方向走査電磁石、3b…Y方向走査電磁石、7…ビーム偏向器制御装置、12…高速スイッチ、13…偏向器電源、15…線量モニタ、16…照射対象、24…ライン電極板、25…裏面導体、26…電極板、27、27a、27b、27c、27d、27e、27f、27g、27h…導体板、28…基板、29…DC電源、31…電圧パルス、51…粒子線治療装置、52…ビーム発生装置、54…シンクロトロン、58、58a、58b…粒子線照射装置、59…ビーム輸送系、60、60a、60b…粒子線照射装置、TV0…伝送基本時間、TP0…粒子移動基本時間。
【特許請求の範囲】
【請求項1】
加速器により加速された荷電粒子ビームを走査電磁石により走査して照射対象に照射する粒子線照射装置であって、
前記走査電磁石の上流側に配置され、前記荷電粒子ビームの進行方向を電場により変更し、前記照射対象への前記荷電粒子ビームの出射及び遮断を行うビーム偏向器と、
前記荷電粒子ビームの進行方向を制御する電圧パルスを前記ビーム偏向器に出力するビーム偏向器制御装置を備え、
前記ビーム偏向器は、前記荷電粒子ビームの進行方向に短手方向を並べた複数の導体板が配置されたライン電極板と、前記ライン電極板に平行に配置された電極板と、前記ライン電極板と前記電極板との間に前記荷電粒子ビームが通過する通過領域を有し、
前記複数の導体板は、長手方向に直列に接続され、インピーダンス整合がされており、
前記ビーム偏向器制御装置は、前記荷電粒子ビームが前記複数の導体板の短手方向を通過する通過周期である粒子移動基本時間に、前記複数の導体板の長手方向を伝送する伝送周期である伝送基本時間を同期させた前記電圧パルスを出力することを特徴とする粒子線照射装置。
【請求項2】
前記ビーム偏向器制御装置は、前記電圧パルスにおけるハイレベルの電圧を供給する偏向器電源と、前記偏向器電源が供給する前記ハイレベルの電圧をパルス状に形成するスイッチを有することを特徴とする請求項1記載の粒子線照射装置。
【請求項3】
前記荷電粒子ビームの線量を測定する線量モニタを備え、
前記ビーム偏向器制御装置は、前記線量モニタで測定された照射線量が計画線量に達した場合に、前記ビーム偏向器に前記荷電粒子ビームの遮断を行うように前記電圧パルスを出力することを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項4】
前記電極板は直流電源に接続され、
前記ビーム偏向器制御装置は、前記荷電粒子ビームの遮断を行う場合に接地レベルの電圧を前記ビーム偏向器に出力し、前記荷電粒子ビームの出射を行う場合に前記電圧パルスをハイレベルにして出力し、
前記ビーム偏向器は、前記荷電粒子ビームの遮断を行う場合に前記荷電粒子ビームを偏向し、前記荷電粒子ビームの出射を行う場合に前記荷電粒子ビームを直進させることを特徴とする請求項1乃至3のいずれか1項に記載の粒子線照射装置。
【請求項5】
前記電極板は接地レベルに接続され、
前記ビーム偏向器制御装置は、前記荷電粒子ビームの遮断を行う場合に接地レベルの電圧を前記ビーム偏向器に出力し、前記荷電粒子ビームの出射を行う場合に前記電圧パルスをハイレベルにして出力し、
前記ビーム偏向器は、前記荷電粒子ビームの遮断を行う場合に前記荷電粒子ビームを直進させ、前記荷電粒子ビームの出射を行う場合に前記荷電粒子ビームを偏向することを特徴とする請求項1乃至3のいずれか1項に記載の粒子線照射装置。
【請求項6】
前記ライン電極板は、基板と、前記基板の表面側に配置された前記複数の導体板と、前記基板の裏面側に接地レベルに接続された裏面導体を有し、前記基板と前記複数の導体板と前記裏面導体の構造は、マイクロストリップライン構造であることを特徴とする請求項1乃至5のいずれか1項に記載の粒子線照射装置。
【請求項7】
荷電粒子ビームを発生させ、この荷電粒子ビームを加速器で加速させるビーム発生装置と、前記加速器により加速された荷電粒子ビームを輸送するビーム輸送系と、前記ビーム輸送系で輸送された荷電粒子ビームを照射対象に照射する粒子線照射装置とを備え、
前記粒子線照射装置は、請求項1乃至6のいずれか1項に記載の粒子線照射装置であることを特徴とする粒子線治療装置。
【請求項1】
加速器により加速された荷電粒子ビームを走査電磁石により走査して照射対象に照射する粒子線照射装置であって、
前記走査電磁石の上流側に配置され、前記荷電粒子ビームの進行方向を電場により変更し、前記照射対象への前記荷電粒子ビームの出射及び遮断を行うビーム偏向器と、
前記荷電粒子ビームの進行方向を制御する電圧パルスを前記ビーム偏向器に出力するビーム偏向器制御装置を備え、
前記ビーム偏向器は、前記荷電粒子ビームの進行方向に短手方向を並べた複数の導体板が配置されたライン電極板と、前記ライン電極板に平行に配置された電極板と、前記ライン電極板と前記電極板との間に前記荷電粒子ビームが通過する通過領域を有し、
前記複数の導体板は、長手方向に直列に接続され、インピーダンス整合がされており、
前記ビーム偏向器制御装置は、前記荷電粒子ビームが前記複数の導体板の短手方向を通過する通過周期である粒子移動基本時間に、前記複数の導体板の長手方向を伝送する伝送周期である伝送基本時間を同期させた前記電圧パルスを出力することを特徴とする粒子線照射装置。
【請求項2】
前記ビーム偏向器制御装置は、前記電圧パルスにおけるハイレベルの電圧を供給する偏向器電源と、前記偏向器電源が供給する前記ハイレベルの電圧をパルス状に形成するスイッチを有することを特徴とする請求項1記載の粒子線照射装置。
【請求項3】
前記荷電粒子ビームの線量を測定する線量モニタを備え、
前記ビーム偏向器制御装置は、前記線量モニタで測定された照射線量が計画線量に達した場合に、前記ビーム偏向器に前記荷電粒子ビームの遮断を行うように前記電圧パルスを出力することを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項4】
前記電極板は直流電源に接続され、
前記ビーム偏向器制御装置は、前記荷電粒子ビームの遮断を行う場合に接地レベルの電圧を前記ビーム偏向器に出力し、前記荷電粒子ビームの出射を行う場合に前記電圧パルスをハイレベルにして出力し、
前記ビーム偏向器は、前記荷電粒子ビームの遮断を行う場合に前記荷電粒子ビームを偏向し、前記荷電粒子ビームの出射を行う場合に前記荷電粒子ビームを直進させることを特徴とする請求項1乃至3のいずれか1項に記載の粒子線照射装置。
【請求項5】
前記電極板は接地レベルに接続され、
前記ビーム偏向器制御装置は、前記荷電粒子ビームの遮断を行う場合に接地レベルの電圧を前記ビーム偏向器に出力し、前記荷電粒子ビームの出射を行う場合に前記電圧パルスをハイレベルにして出力し、
前記ビーム偏向器は、前記荷電粒子ビームの遮断を行う場合に前記荷電粒子ビームを直進させ、前記荷電粒子ビームの出射を行う場合に前記荷電粒子ビームを偏向することを特徴とする請求項1乃至3のいずれか1項に記載の粒子線照射装置。
【請求項6】
前記ライン電極板は、基板と、前記基板の表面側に配置された前記複数の導体板と、前記基板の裏面側に接地レベルに接続された裏面導体を有し、前記基板と前記複数の導体板と前記裏面導体の構造は、マイクロストリップライン構造であることを特徴とする請求項1乃至5のいずれか1項に記載の粒子線照射装置。
【請求項7】
荷電粒子ビームを発生させ、この荷電粒子ビームを加速器で加速させるビーム発生装置と、前記加速器により加速された荷電粒子ビームを輸送するビーム輸送系と、前記ビーム輸送系で輸送された荷電粒子ビームを照射対象に照射する粒子線照射装置とを備え、
前記粒子線照射装置は、請求項1乃至6のいずれか1項に記載の粒子線照射装置であることを特徴とする粒子線治療装置。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】

【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−24254(P2012−24254A)
【公開日】平成24年2月9日(2012.2.9)
【国際特許分類】
【出願番号】特願2010−164873(P2010−164873)
【出願日】平成22年7月22日(2010.7.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年2月9日(2012.2.9)
【国際特許分類】
【出願日】平成22年7月22日(2010.7.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]