
綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置
【課題】綾巻きボビンを製造する繊維機械の巻取装置のための、フィンガ形糸ガイドを備えた糸綾振り装置を改良して一方では巻取られる糸の高いトラバース速度が達成され、他方では糸レーイング中に前記フィンガ糸ガイドの糸レーイングアームができるだけ振動しないようにすること。
【解決手段】本発明の課題は綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上にトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承されかつ電気モータ式の駆動装置によって負荷可能なフィンガ形糸ガイド(13)として構成されている形式のものにおいて、前記フィンガ形糸ガイド(13)がその糸レーイングアーム(18)で振動減衰器(20)に支えられていることによって解決された。
【解決手段】本発明の課題は綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上にトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承されかつ電気モータ式の駆動装置によって負荷可能なフィンガ形糸ガイド(13)として構成されている形式のものにおいて、前記フィンガ形糸ガイド(13)がその糸レーイングアーム(18)で振動減衰器(20)に支えられていることによって解決された。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上に糸をトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承された、電気モータ式の駆動装置によって負荷可能なフィンガ形糸ガイドとして構成されている形式のものに関する。
【背景技術】
【0002】
繊維ボビン、特にいわゆる綾巻きボビンを製造するためには周知のように少なくとも2つの前提条件が充たされなければならない。その1つは糸をボビン体に巻付けるために繊維ボビンを回転させる必要があることであり、もう1つは回転する繊維ボビンに巻付けられる糸に、ボビン軸線に沿ったトラバース運動が与えられる必要があることである。最近の繊維機械は綾巻きボビンを製造する場合には比較的に高い巻取り速度で作業するために、綾振り装置も高いトラバース速度を達成できる状態になければならない。
【0003】
繊維糸に高速度でトラバース運動を与えることのできる前記形式の綾振り装置は、繊維機械工業では長らく公知であり、特許文献に種々の実施形態で詳細に記載されている。
【0004】
DE4310905A1号明細書には例えばいわゆるベルト式糸ガイドが記載されている。このようなベルト式糸ガイドは、巻付けボビンに巻付けられる糸を交互に高速で巻付けボビンの一方の側から他方の側へレーイングするために複数の糸連行体を備えかつ逆向きに移動する2つのベルトストランドを有している。
【0005】
このような公知のベルト式糸ガイドにおいては糸の反転領域における糸引渡しが欠点として認識されている。つまり、このようなベルト式糸ガイドでは糸の引渡しにしばしば問題がある。
【0006】
さらに高速運転される自動綾巻機では溝付きドラムとして構成された糸ガイドドラムが広く用いられている。この糸ガイドドラムは同時に糸の綾振りの他に摩擦接続を介した綾巻きボビンの周面駆動を行なう。例えばDE4237860A1号明細書に記載されている前記形式の装置ではもちろん綾巻きボビンは「ワイルドワインディング」という巻取形式でしか巻かれることができない。つまりこの場合に巻かれる綾巻きボビンでは巻取り比は巻取過程中にボビン直径が大きくなるにつれて小さくなる。さらにこのような糸ガイドドラムではボビン直径とは無関係に常に同じ糸巻付け角が与えられるので、所定の巻き付け比で、特別な処置が採用されていないと、いわゆるリボン巻きが発生する。このリボン巻きを回避するためにはすでに多数の特殊なリボン巻き破壊法が開発されている。
【0007】
所定の巻きパターン、例えば精密又は段階精密巻きを有するボビンを形成するためには巻取過程の間、一定の又は少なくとも一時的に一定の比がボビン回転数と糸綾振り速度との間に維持されなければならない。
【0008】
前述の如き巻きを有するボビンを形成するためにはボビンの駆動を糸綾振り装置の駆動から分離することが必要である。
【0009】
巻付けボビンの駆動が糸綾振り装置の駆動から分離されている巻取装置は例えばDE19858548A1号明細書、DE19960024A1明細書に記載されている。この公知の巻取装置は単独モータで負荷可能なボビン駆動装置と個別に駆動可能な糸綾振り装置とを有している。この場合、この公知の巻取装置は糸レーイングアームを有している。DE19820464A1号明細書、DE10332399A1号明細書又はEP0838422B1号明細書にも記載されているいわゆるフィンガ形糸ガイドの駆動はそれぞれ電気モータ式の個別駆動装置で行なわれる。糸レーイングアームの形を最適化するためにこの糸綾振り装置の慣性は、このような糸綾振り装置できわめて高い綾振り周波数が実現可能であるように減少させられていることができる。
【0010】
もちろんこの場合には高速度で糸綾振り装置を通過する糸によって、フィンガ形糸ガイドの比較的に重量の小さい糸レーイングアームにて振動が発生することが確認されている。この振動は糸レーイングを著しく妨げ、ひいては製造しようとする綾巻きボビンの品質を低下させる可能性がある。
【特許文献1】DE4310905A1号明細書
【特許文献2】DE4237860A1号明細書
【特許文献3】DE19858548A1号明細書
【特許文献4】DE19960024A1明細書
【特許文献5】DE19820464A1号明細書
【特許文献6】DE10332399A1号明細書
【特許文献7】EP0838422B1号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
前述の公知技術から出発して本発明の課題は綾巻きボビンを製造する繊維機械の巻取装置のための、フィンガ形糸ガイドを備えた糸綾振り装置を改良して、一方では巻付けられる糸の高いトラバース速度が実現可能であって、他方では糸レーイング中にフィンガ形糸ガイドの糸レーイングアームが振動しないことを保証することである。
【課題を解決するための手段】
【0012】
本発明の課題は請求項1の特徴部に記載した特徴によって解決された。
【0013】
本発明の有利な実施態様は従属請求項の対象である。
【0014】
定置の振動減衰器を使用し、この振動減衰器にフィンガ形糸ガイドの糸レーイングアームが糸レーイング中に支持されることによって糸レーイングアームの自由な長さが著しく短縮される。これは糸レーイングアームの曲げ剛性に正の影響を与える。しかもこの場合にはフィンガ形糸ガイドの慣性モーメントは上昇させられることもない。つまり、本発明の振動減衰器は糸レーイングアームの糸案内スリットにおける走行する糸の摩擦が糸レーイングアームを振動させ、この振動が巻取プロセスにきわめて不都合な影響を及ぼすことが回避される。
【0015】
この場合、本発明の有利な実施態様(請求項2)においては、振動減衰器が糸走行方向で糸レーイングアームの下流側に配置されている。
【0016】
このような配置では、糸レーイングアームが走行する糸によって、ほぼ一定の、もちろん比較的に低い押付け力で振動減衰器に押付けられかつこの振動減衰器により糸綾振り過程の間一様に支持されることが保証されるようになった。
【0017】
請求項3に記載されているように、振動減衰器は有利な実施形態では糸レーイングアームの自由長さが全長(L)のほぼ1/3に短縮されるように配置されている。すなわち、糸摩擦によって糸レーイングアームに作用する曲げ力が有効になるレバーアームは元の長さのほぼ1/3に減少される。この結果、すでに先きに述べたようにこの構成部分の曲げ剛性に正の影響が及ぼされかつ有害な振動が回避されることになる。
【0018】
請求項4,5によれば振動減衰器は円形リングセグメントとして構成され、フィンガ形糸ガイドの電気モータ式の駆動装置のモータケーシングのフロント側に固定されている。振動減衰器の円形リング状の構成は、糸綾振り幅全体に亙ってほぼ一様な状態が与えられることを保証する。つまり、糸綾振り中に糸レーイングアームのてこ比が等しく保たれる。さらに振動減衰器の円形リング状の構成は糸ガイド駆動装置の円形のモータケーシングに対する振動減衰器の取付けを好適化する。この場合、振動減衰器は例えば適当な接着剤で直接的にモータケーシングの適当なブランケットに固定されることができる。
【0019】
もちろん請求項6に記載したようにモータケーシングに対する振動減衰器の取外し可能な取付けも考えられる。
【0020】
このような1つの例では請求項7に記載したように抵抗性の滑り性のよい材料、例えばポリテトラフルオルエチレンから製作された振動減衰器が、例えばねじピン又はそれに類似したものを介してモータケーシングに固定された支持体の上に固定される。糸レーイングアームによる振動減衰器の機械的な負荷は比較的に低いので、このような装置はほぼ無限の寿命を有する。さらにポリテトラフルオルエチレンで被覆された振動減衰器は費用的に比較的に好適に製作可能で、どんな運転条件のもとでもきわめて高い信頼性をもって働く。
【0021】
有利な形式で、請求項8で示したように、フィンガ形糸ガイドの糸レーイングアームは振動減衰器と協働する滑りエレメントを有している。有利には同様にポリテトラフルオルエチレンから成る被覆を有する滑りエレメントは糸レーイングアームと振動減衰器との間の摩擦抵抗を一層低減する。すなわち、糸レーイングアームと振動減衰器との間の摩擦抵抗はさらに減退させられることができる。
【0022】
以下、本発明を図示された1実施例に基づき詳細に説明する。
【発明を実施するための最良の形態】
【0023】
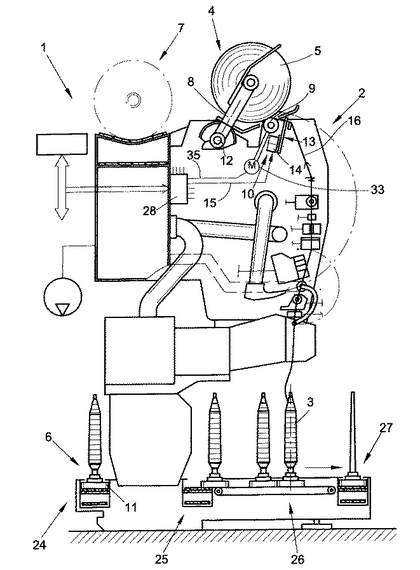
図1には側面図で概略的に、綾巻きボビンを製造する繊維機械、この場合にはいわゆる自動綾巻機1の作業部位2が概略的に示されている。このような自動綾巻機1の作業部位2では、公知であるために詳細には説明していない形式で、リング紡績機で生産された紡績コップ3が容積の大きい綾巻きボビン5に巻返えされる。綾巻ボビン5はその製造後、自動的に作業するサービス装置、有利には綾巻ボビン交換機(図示せず)によって、機械長さの綾巻ボビン搬送装置7に引渡され、機械端部側に配置されたボビン積込みステーション又はそれに類似したものに搬送される。
【0024】
このような自動綾巻機1は通常その他にボビン及び巻管搬送システム6の形をした論理装置を有している。このボビン及び巻管搬送システム6においては搬送皿11の上で紡績コップ3もしくは空の巻管が循環する。
【0025】
ボビン及び巻管搬送システム6の内、図1にはコップ供給区間24と可逆式に駆動可能な貯蔵区間25と作業部位2へ通じる横搬送区間26と巻管戻し区間27としか図示されていない。
【0026】
自動綾巻機1の各作業部位2は、バス接続を介して中央制御ユニットに接続された作業部位計算機28と、作業部位2の秩序正しい稼働にとって必要である種々の他の装置とを有している。
【0027】
自体公知である前記装置の1つは例えば巻取装置4である。このような巻取装置4は旋回軸12を中心として可動に支承されたボビンフレーム8を有している。図1に示されているように、ボビンフレーム8に自由回転可能に保持された綾巻ボビン5は巻取運転の間、その表面で支持及び駆動ローラ9の上に支持されている。この支持及び駆動ローラ9は電気モータ33によって負荷されている。その際、電気モータ33は制御導線35を介して作業部位計算機28に接続されている。
【0028】
巻取プロセスの間糸16に綾振り運動を与えるためには糸綾振り装置10が設けられている。図1に単に概略的に示されているに過ぎない糸綾振り装置10は、例えば図2に示されているように、フィンガ形糸ガイド13から成っている。このフィンガ形糸ガイド13は電気モータ式の駆動装置により負荷されて、綾巻ボビン5に巻付けられる糸16に綾巻ボビン5の端面の間でトラバース運動を与える。制御導線15を介して糸ガイド駆動装置14は作業部位計算機28と接続されている。
【0029】
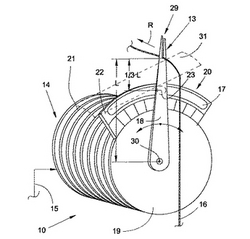
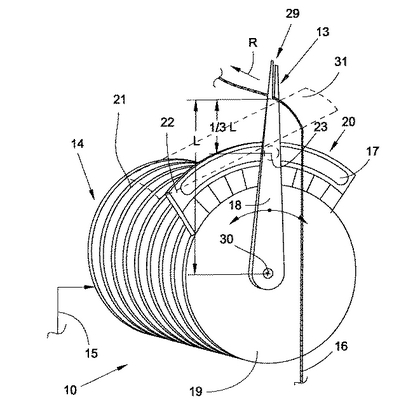
図2に示されているように、フィンガ形糸ガイド13の糸レーイングアーム18は糸レーイングスリット29の底と糸レーイングアーム18の旋回軸30との間に全長Lを有している。糸ガイド駆動装置14のモータ軸に相対回動不能に固定されている糸レーイングアーム18は糸レーイングスリット29から間隔1/3Lをおいて滑りエレメント23を有している。この滑りエレメント23を介して糸レーイングアーム18は糸綾振りの間、振動減衰器20に支えられる。円形リング状に構成された振動減衰器20並びに滑りエレメント23は有利にはポリテトラフルオルエチレンから、きわめて滑りは特性の良い、商品名テフロンで知られている材料から製作されている。図2に示されているように振動減衰器20は糸ガイド駆動装置13のモータケーシング21のブランケット22に取外し可能に又は取外し不能に固定されかつ糸16の走行方向Rで糸レーイングアーム18の下流側に配置されている。つまり、綾巻ボビン5に巻付けられる糸16は糸案内輪郭31を介して糸レーイングアーム18の糸レーイングスリット29に達し、その際、2つの反転領域の間で糸に綾振運動が与えられる。その際に糸レーイングアーム18の糸レーイングスリット29内を走行する糸16の摩擦によって糸レーイングアーム18に発生する曲げ応力は、振動減衰器20によって十分に吸収される。つまり本発明による振動減衰器20は有害な振動の発生を阻止する。
【図面の簡単な説明】
【0030】
【図1】綾巻ボビンを製造する繊維機械の作業部位の概略図。
【図2】糸レーイングアームが本発明による振動減衰器に支えられているフィンガ形糸ガイドの電気モータ式の駆動装置の斜視図。
【符号の説明】
【0031】
1 自動綾振機
2 作業部位
3 紡績コップ
5 綾巻ボビン
6 ボビン及び巻管搬送システム
7 綾巻ボビン搬送装置
8 ボビンフレーム
9 駆動ローラ
10 糸綾振り装置
11 搬送皿
13 フィンガ形糸ガイド
14 駆動装置
15 制御導線
16 糸
18 糸レーイングアーム
20 振動減衰器
21 モータケーシング
22 ブラケット
23 滑りエレメント
24 コップ供給区間
25 貯蔵区間
26 横搬送区間
27 巻管戻し区間
28 作業部位計算機
29 糸レーイングスリット
30 旋回軸
31 糸案内輪郭
33 電気モータ
35 制御導線
【技術分野】
【0001】
本発明は、綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上に糸をトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承された、電気モータ式の駆動装置によって負荷可能なフィンガ形糸ガイドとして構成されている形式のものに関する。
【背景技術】
【0002】
繊維ボビン、特にいわゆる綾巻きボビンを製造するためには周知のように少なくとも2つの前提条件が充たされなければならない。その1つは糸をボビン体に巻付けるために繊維ボビンを回転させる必要があることであり、もう1つは回転する繊維ボビンに巻付けられる糸に、ボビン軸線に沿ったトラバース運動が与えられる必要があることである。最近の繊維機械は綾巻きボビンを製造する場合には比較的に高い巻取り速度で作業するために、綾振り装置も高いトラバース速度を達成できる状態になければならない。
【0003】
繊維糸に高速度でトラバース運動を与えることのできる前記形式の綾振り装置は、繊維機械工業では長らく公知であり、特許文献に種々の実施形態で詳細に記載されている。
【0004】
DE4310905A1号明細書には例えばいわゆるベルト式糸ガイドが記載されている。このようなベルト式糸ガイドは、巻付けボビンに巻付けられる糸を交互に高速で巻付けボビンの一方の側から他方の側へレーイングするために複数の糸連行体を備えかつ逆向きに移動する2つのベルトストランドを有している。
【0005】
このような公知のベルト式糸ガイドにおいては糸の反転領域における糸引渡しが欠点として認識されている。つまり、このようなベルト式糸ガイドでは糸の引渡しにしばしば問題がある。
【0006】
さらに高速運転される自動綾巻機では溝付きドラムとして構成された糸ガイドドラムが広く用いられている。この糸ガイドドラムは同時に糸の綾振りの他に摩擦接続を介した綾巻きボビンの周面駆動を行なう。例えばDE4237860A1号明細書に記載されている前記形式の装置ではもちろん綾巻きボビンは「ワイルドワインディング」という巻取形式でしか巻かれることができない。つまりこの場合に巻かれる綾巻きボビンでは巻取り比は巻取過程中にボビン直径が大きくなるにつれて小さくなる。さらにこのような糸ガイドドラムではボビン直径とは無関係に常に同じ糸巻付け角が与えられるので、所定の巻き付け比で、特別な処置が採用されていないと、いわゆるリボン巻きが発生する。このリボン巻きを回避するためにはすでに多数の特殊なリボン巻き破壊法が開発されている。
【0007】
所定の巻きパターン、例えば精密又は段階精密巻きを有するボビンを形成するためには巻取過程の間、一定の又は少なくとも一時的に一定の比がボビン回転数と糸綾振り速度との間に維持されなければならない。
【0008】
前述の如き巻きを有するボビンを形成するためにはボビンの駆動を糸綾振り装置の駆動から分離することが必要である。
【0009】
巻付けボビンの駆動が糸綾振り装置の駆動から分離されている巻取装置は例えばDE19858548A1号明細書、DE19960024A1明細書に記載されている。この公知の巻取装置は単独モータで負荷可能なボビン駆動装置と個別に駆動可能な糸綾振り装置とを有している。この場合、この公知の巻取装置は糸レーイングアームを有している。DE19820464A1号明細書、DE10332399A1号明細書又はEP0838422B1号明細書にも記載されているいわゆるフィンガ形糸ガイドの駆動はそれぞれ電気モータ式の個別駆動装置で行なわれる。糸レーイングアームの形を最適化するためにこの糸綾振り装置の慣性は、このような糸綾振り装置できわめて高い綾振り周波数が実現可能であるように減少させられていることができる。
【0010】
もちろんこの場合には高速度で糸綾振り装置を通過する糸によって、フィンガ形糸ガイドの比較的に重量の小さい糸レーイングアームにて振動が発生することが確認されている。この振動は糸レーイングを著しく妨げ、ひいては製造しようとする綾巻きボビンの品質を低下させる可能性がある。
【特許文献1】DE4310905A1号明細書
【特許文献2】DE4237860A1号明細書
【特許文献3】DE19858548A1号明細書
【特許文献4】DE19960024A1明細書
【特許文献5】DE19820464A1号明細書
【特許文献6】DE10332399A1号明細書
【特許文献7】EP0838422B1号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
前述の公知技術から出発して本発明の課題は綾巻きボビンを製造する繊維機械の巻取装置のための、フィンガ形糸ガイドを備えた糸綾振り装置を改良して、一方では巻付けられる糸の高いトラバース速度が実現可能であって、他方では糸レーイング中にフィンガ形糸ガイドの糸レーイングアームが振動しないことを保証することである。
【課題を解決するための手段】
【0012】
本発明の課題は請求項1の特徴部に記載した特徴によって解決された。
【0013】
本発明の有利な実施態様は従属請求項の対象である。
【0014】
定置の振動減衰器を使用し、この振動減衰器にフィンガ形糸ガイドの糸レーイングアームが糸レーイング中に支持されることによって糸レーイングアームの自由な長さが著しく短縮される。これは糸レーイングアームの曲げ剛性に正の影響を与える。しかもこの場合にはフィンガ形糸ガイドの慣性モーメントは上昇させられることもない。つまり、本発明の振動減衰器は糸レーイングアームの糸案内スリットにおける走行する糸の摩擦が糸レーイングアームを振動させ、この振動が巻取プロセスにきわめて不都合な影響を及ぼすことが回避される。
【0015】
この場合、本発明の有利な実施態様(請求項2)においては、振動減衰器が糸走行方向で糸レーイングアームの下流側に配置されている。
【0016】
このような配置では、糸レーイングアームが走行する糸によって、ほぼ一定の、もちろん比較的に低い押付け力で振動減衰器に押付けられかつこの振動減衰器により糸綾振り過程の間一様に支持されることが保証されるようになった。
【0017】
請求項3に記載されているように、振動減衰器は有利な実施形態では糸レーイングアームの自由長さが全長(L)のほぼ1/3に短縮されるように配置されている。すなわち、糸摩擦によって糸レーイングアームに作用する曲げ力が有効になるレバーアームは元の長さのほぼ1/3に減少される。この結果、すでに先きに述べたようにこの構成部分の曲げ剛性に正の影響が及ぼされかつ有害な振動が回避されることになる。
【0018】
請求項4,5によれば振動減衰器は円形リングセグメントとして構成され、フィンガ形糸ガイドの電気モータ式の駆動装置のモータケーシングのフロント側に固定されている。振動減衰器の円形リング状の構成は、糸綾振り幅全体に亙ってほぼ一様な状態が与えられることを保証する。つまり、糸綾振り中に糸レーイングアームのてこ比が等しく保たれる。さらに振動減衰器の円形リング状の構成は糸ガイド駆動装置の円形のモータケーシングに対する振動減衰器の取付けを好適化する。この場合、振動減衰器は例えば適当な接着剤で直接的にモータケーシングの適当なブランケットに固定されることができる。
【0019】
もちろん請求項6に記載したようにモータケーシングに対する振動減衰器の取外し可能な取付けも考えられる。
【0020】
このような1つの例では請求項7に記載したように抵抗性の滑り性のよい材料、例えばポリテトラフルオルエチレンから製作された振動減衰器が、例えばねじピン又はそれに類似したものを介してモータケーシングに固定された支持体の上に固定される。糸レーイングアームによる振動減衰器の機械的な負荷は比較的に低いので、このような装置はほぼ無限の寿命を有する。さらにポリテトラフルオルエチレンで被覆された振動減衰器は費用的に比較的に好適に製作可能で、どんな運転条件のもとでもきわめて高い信頼性をもって働く。
【0021】
有利な形式で、請求項8で示したように、フィンガ形糸ガイドの糸レーイングアームは振動減衰器と協働する滑りエレメントを有している。有利には同様にポリテトラフルオルエチレンから成る被覆を有する滑りエレメントは糸レーイングアームと振動減衰器との間の摩擦抵抗を一層低減する。すなわち、糸レーイングアームと振動減衰器との間の摩擦抵抗はさらに減退させられることができる。
【0022】
以下、本発明を図示された1実施例に基づき詳細に説明する。
【発明を実施するための最良の形態】
【0023】
図1には側面図で概略的に、綾巻きボビンを製造する繊維機械、この場合にはいわゆる自動綾巻機1の作業部位2が概略的に示されている。このような自動綾巻機1の作業部位2では、公知であるために詳細には説明していない形式で、リング紡績機で生産された紡績コップ3が容積の大きい綾巻きボビン5に巻返えされる。綾巻ボビン5はその製造後、自動的に作業するサービス装置、有利には綾巻ボビン交換機(図示せず)によって、機械長さの綾巻ボビン搬送装置7に引渡され、機械端部側に配置されたボビン積込みステーション又はそれに類似したものに搬送される。
【0024】
このような自動綾巻機1は通常その他にボビン及び巻管搬送システム6の形をした論理装置を有している。このボビン及び巻管搬送システム6においては搬送皿11の上で紡績コップ3もしくは空の巻管が循環する。
【0025】
ボビン及び巻管搬送システム6の内、図1にはコップ供給区間24と可逆式に駆動可能な貯蔵区間25と作業部位2へ通じる横搬送区間26と巻管戻し区間27としか図示されていない。
【0026】
自動綾巻機1の各作業部位2は、バス接続を介して中央制御ユニットに接続された作業部位計算機28と、作業部位2の秩序正しい稼働にとって必要である種々の他の装置とを有している。
【0027】
自体公知である前記装置の1つは例えば巻取装置4である。このような巻取装置4は旋回軸12を中心として可動に支承されたボビンフレーム8を有している。図1に示されているように、ボビンフレーム8に自由回転可能に保持された綾巻ボビン5は巻取運転の間、その表面で支持及び駆動ローラ9の上に支持されている。この支持及び駆動ローラ9は電気モータ33によって負荷されている。その際、電気モータ33は制御導線35を介して作業部位計算機28に接続されている。
【0028】
巻取プロセスの間糸16に綾振り運動を与えるためには糸綾振り装置10が設けられている。図1に単に概略的に示されているに過ぎない糸綾振り装置10は、例えば図2に示されているように、フィンガ形糸ガイド13から成っている。このフィンガ形糸ガイド13は電気モータ式の駆動装置により負荷されて、綾巻ボビン5に巻付けられる糸16に綾巻ボビン5の端面の間でトラバース運動を与える。制御導線15を介して糸ガイド駆動装置14は作業部位計算機28と接続されている。
【0029】
図2に示されているように、フィンガ形糸ガイド13の糸レーイングアーム18は糸レーイングスリット29の底と糸レーイングアーム18の旋回軸30との間に全長Lを有している。糸ガイド駆動装置14のモータ軸に相対回動不能に固定されている糸レーイングアーム18は糸レーイングスリット29から間隔1/3Lをおいて滑りエレメント23を有している。この滑りエレメント23を介して糸レーイングアーム18は糸綾振りの間、振動減衰器20に支えられる。円形リング状に構成された振動減衰器20並びに滑りエレメント23は有利にはポリテトラフルオルエチレンから、きわめて滑りは特性の良い、商品名テフロンで知られている材料から製作されている。図2に示されているように振動減衰器20は糸ガイド駆動装置13のモータケーシング21のブランケット22に取外し可能に又は取外し不能に固定されかつ糸16の走行方向Rで糸レーイングアーム18の下流側に配置されている。つまり、綾巻ボビン5に巻付けられる糸16は糸案内輪郭31を介して糸レーイングアーム18の糸レーイングスリット29に達し、その際、2つの反転領域の間で糸に綾振運動が与えられる。その際に糸レーイングアーム18の糸レーイングスリット29内を走行する糸16の摩擦によって糸レーイングアーム18に発生する曲げ応力は、振動減衰器20によって十分に吸収される。つまり本発明による振動減衰器20は有害な振動の発生を阻止する。
【図面の簡単な説明】
【0030】
【図1】綾巻ボビンを製造する繊維機械の作業部位の概略図。
【図2】糸レーイングアームが本発明による振動減衰器に支えられているフィンガ形糸ガイドの電気モータ式の駆動装置の斜視図。
【符号の説明】
【0031】
1 自動綾振機
2 作業部位
3 紡績コップ
5 綾巻ボビン
6 ボビン及び巻管搬送システム
7 綾巻ボビン搬送装置
8 ボビンフレーム
9 駆動ローラ
10 糸綾振り装置
11 搬送皿
13 フィンガ形糸ガイド
14 駆動装置
15 制御導線
16 糸
18 糸レーイングアーム
20 振動減衰器
21 モータケーシング
22 ブラケット
23 滑りエレメント
24 コップ供給区間
25 貯蔵区間
26 横搬送区間
27 巻管戻し区間
28 作業部位計算機
29 糸レーイングスリット
30 旋回軸
31 糸案内輪郭
33 電気モータ
35 制御導線
【特許請求の範囲】
【請求項1】
綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上にトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承されかつ電気モータ式の駆動装置によって負荷可能なフィンガ糸ガイド(13)として構成されている形式のものにおいて、
前記フィンガ糸ガイド(13)がその糸レーイングアーム(18)で定置の振動減衰器(20)に支持されていることを特徴とする、綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振装置。
【請求項2】
前記振動減衰器(20)が糸走行方向(F)で前記フィンガ糸ガイド(13)の前記糸レーイングアーム(18)の下流側に配置されている、請求項1記載の糸綾振り装置。
【請求項3】
前記糸レーイングアーム(18)の自由端部が該糸レーイングアーム(18)の全長(L)のほぼ1/3に短縮されるように前記振動減衰器(20)が配置されている、請求項1記載の糸綾振り装置。
【請求項4】
前記振動減衰器(20)が円形リングセグメントとして構成されている、請求項1から3までのいずれか1項記載の糸綾振り装置。
【請求項5】
前記振動減衰器(20)が前記フィンガ形糸ガイド(13)の電気モータ式の駆動装置(14)のモータケーシング(21)のフロント側(19)に固定されている、請求項1記載の糸綾振り装置。
【請求項6】
振動減衰器(20)がモータケーシング(21)のブラケット(22)に解離可能に配置されている、請求項5記載の糸綾振り装置。
【請求項7】
前記振動減衰器(20)が抵抗性で滑特性の良好である材料、例えばポリテトラフルオルエチレンから製作されている、請求項1記載の糸綾振り装置。
【請求項8】
前記フィンガ形糸ガイド(13)の前記糸レーイングアーム(18)が前記振動減衰器(20)と協働する滑りエレメント(23)を有している、請求項1記載の糸綾振り装置。
【請求項1】
綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振り装置であって、回転駆動可能な巻付けボビンの上にトラバース運動で供給するために糸ガイドを有し、該糸ガイドが旋回軸を中心として制限されて運動可能に支承されかつ電気モータ式の駆動装置によって負荷可能なフィンガ糸ガイド(13)として構成されている形式のものにおいて、
前記フィンガ糸ガイド(13)がその糸レーイングアーム(18)で定置の振動減衰器(20)に支持されていることを特徴とする、綾巻きボビンを製造する繊維機械の巻取装置のための糸綾振装置。
【請求項2】
前記振動減衰器(20)が糸走行方向(F)で前記フィンガ糸ガイド(13)の前記糸レーイングアーム(18)の下流側に配置されている、請求項1記載の糸綾振り装置。
【請求項3】
前記糸レーイングアーム(18)の自由端部が該糸レーイングアーム(18)の全長(L)のほぼ1/3に短縮されるように前記振動減衰器(20)が配置されている、請求項1記載の糸綾振り装置。
【請求項4】
前記振動減衰器(20)が円形リングセグメントとして構成されている、請求項1から3までのいずれか1項記載の糸綾振り装置。
【請求項5】
前記振動減衰器(20)が前記フィンガ形糸ガイド(13)の電気モータ式の駆動装置(14)のモータケーシング(21)のフロント側(19)に固定されている、請求項1記載の糸綾振り装置。
【請求項6】
振動減衰器(20)がモータケーシング(21)のブラケット(22)に解離可能に配置されている、請求項5記載の糸綾振り装置。
【請求項7】
前記振動減衰器(20)が抵抗性で滑特性の良好である材料、例えばポリテトラフルオルエチレンから製作されている、請求項1記載の糸綾振り装置。
【請求項8】
前記フィンガ形糸ガイド(13)の前記糸レーイングアーム(18)が前記振動減衰器(20)と協働する滑りエレメント(23)を有している、請求項1記載の糸綾振り装置。
【図1】


【図2】
【図2】
【公開番号】特開2006−335573(P2006−335573A)
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願番号】特願2006−156219(P2006−156219)
【出願日】平成18年6月5日(2006.6.5)
【出願人】(503420235)ザウラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト (51)
【氏名又は名称原語表記】Saurer GmbH & Co. KG
【住所又は居所原語表記】Landgrafen Str. 45, D−41069 Moenchengladbach, Germany
【Fターム(参考)】
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願日】平成18年6月5日(2006.6.5)
【出願人】(503420235)ザウラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト (51)
【氏名又は名称原語表記】Saurer GmbH & Co. KG
【住所又は居所原語表記】Landgrafen Str. 45, D−41069 Moenchengladbach, Germany
【Fターム(参考)】
[ Back to top ]