
関心のある対象に対する植生成長を見積もる方法とシステム
関心のある対象に対する植生成長を見積もる方法が開示される。目標植生は第2検出データセットから識別される(30)。対応する目標植生は第1検出データセット内で識別され(34)、該第1検出データセットは該第2検出データセット(28)の前の時間に収集される(26)。第1統計値は、該関心のある対象に対する該第1検出データセット内の対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる(38)。第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる(40)。侵入速度は該第1統計値と該第2統計値の比較から決定される(42)。
【発明の詳細な説明】
【技術分野】
【0001】
請求する発明は一般的にLiDARデータの様な検出データから樹木についての情報を決定する方法とシステムに関する。特に、該請求する発明は他の対象に対する植生の成長を見積もる方法とシステムに関する。
【0002】
版権
本特許文書の開示の1部分は版権保護を受ける資料を含んでいる。該版権所有人は、特許庁及びその商標部門の特許フアイル又は記録に開示特許が出る限りに於いては、何人によるフアクシミリ複製にも反対しないが、それ以外の場合は全版権を留保するものである。
【背景技術】
【0003】
多くの公益設備にとって、樹木は全ての予定しない供給停止の1番の原因である。台風時の電力供給システムへの大抵の損傷は電力線をサービス不能にする落下木又は枝により引き起こされる。供給システムへの樹木による損害の頻度を減じるのを助けるために、多くの公益事業者は保全対策として植生管理プログラムを実施している。北米公益事業者は、樹木接触導体に付随するサービス中断及び安全上の問題を防止する努力の中で植生管理に年間約5,600億円($7 billion)から約8,000億円($10 billion)を費やしている。
【0004】
従来、植生管理プログラムは、ユーティリティシステム周りの植生の管理を助けるアーボリストチームによる規則的監視及び枝打ちに頼って来たが、広大な距離をカバーする非常に多くのユーティリティラインは、多くの場合、地上監視チームの派遣を非現実的にする。結果として、多くの公益会社は、予想される植生成長問題用に調べられ得るユーティリティシステムの写真画像を提供する空中探索技術へ既に転換している。空中画像又はヘリコプターベースのラインパトロールは、公益用の敷設用地内へ侵入成長した植生を調べられるが、関心のある対象(object of interest)に対する植生の成長の見積に基づき、植生問題が発生する前に、該植生問題を予測出来る満足すべき方法又はシステムは未だ存在しない。公益会社は従来、植生や樹木の成長を、高さ、幹直径又は容積の成長として決定し、これらの成長速度から公益敷設用地に近い植生成長を予測するよう使われて来たが、この様な見積は該ユーティリティ(電力線の様な)に対する又はその間隙空間パターンに対する成長を提供しない。残念ながら、ライン間隙に対する成長は植生高さ、直径又は容積によりうまく規定されない。この知識不足は、必要な軽減法の種類すなわち刈り取り、カット、トリミング又は樹木除去、に関する時宜を得た、効率的な意志決定力を限定している。その結果、侵入を解決するため必要な保守の種類を決定するよう、現地職員が自身で現場を訪れる必要があることが多い。干渉軽減のコストは必要な保守の種類に非常に左右される。保守の種類に関する事前の知識不足のため効果的でない計画は資源を浪費し、必要以上のなすべき多くの仕事をもたらす。従って、電力線導体の様な関心のある対象に対する植生成長を決定し、公益設備に対する植生侵入の課題をより精密に予測するために、将来の間隙ニーヅを予測するよう、この成長を使う、経済的で、信頼出来て、使い易い方法とシステムを有することが望ましい。
【発明の概要】
【0005】
関心のある対象に対する植生成長を見積もる方法が開示される。目標植生が第2検出データセットから識別される。対応する目標植生が第1検出データセット内で識別され、該第1検出データセットは該第2検出データセットの前の時間に収集される。第1統計値が、関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の
点の距離に基づき、該対応する目標植生の属性と考えられる。第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる。侵入速度は該第1統計値と該第2統計値の比較から決定される。
【0006】
コンピュータ読み出し可能な記憶媒体も開示される。該コンピュータ読み出し可能な記憶媒体は、関心のある対象に対する植生成長を見積もるために該媒体上に記憶されたインストラクションを有する。該インストラクションは、プロセッサにより実行されると、該プロセッサに:1)第1検出データセットを提供させ、;2)第2検出データセットを提供させ;3)該第2検出データセットから目標植生を識別させ;4)該第1検出データセット内の対応する目標植生を識別させ、該第1検出データセットが該第2検出データセットの前の時間に収集されて、該対応する目標植生を識別させ;5)第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づく、該対応する目標植生の属性と考えさせ;6)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づく、該目標植生の属性と考えさせ;そして7)該第1統計値及び第2統計値の比較から侵入速度を決定させる。
【0007】
関心のある対象に対する植生成長を見積もるシステムもまた開示される。該システムは、1)第2検出データセットから目標植生を識別し、;2)第1検出データセット内の対応する目標植生を識別し、該第1検出データセットが該第2検出データセットの前の時間に収集されて、該対応する目標植生を識別し;3)第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づく、該対応する目標植生の属性と考え;4)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づく、該目標植生の属性と考え;そして5)該第1統計値及び第2統計値の比較から侵入速度を決定する、よう構成されたプロセッサを有する。該システムは該プロセッサに接続され、該プロセッサに該第1及び第2検出データセットを提供するよう構成されたデータ入力部を有しる。該システムは更に該プロセッサか又は該データ入力部か何れかに接続されたユーザーインターフエースを有する。
【図面の簡単な説明】
【0008】
【図1】検出データセットの実施例を略図で図解する。
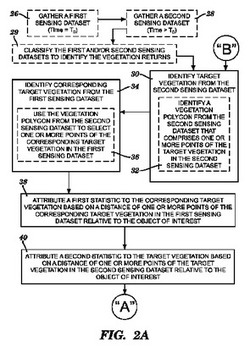
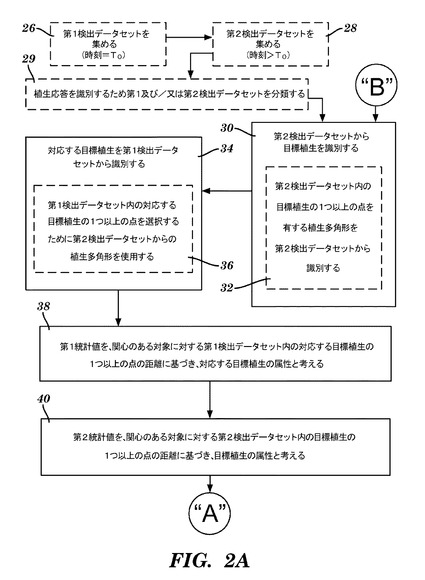
【図2A−2C】関心のある対象に対する植生成長を見積もる方法の1実施例を図解する。
【図3】LiDARデータセットの断面図の実施例を略図で図解する。
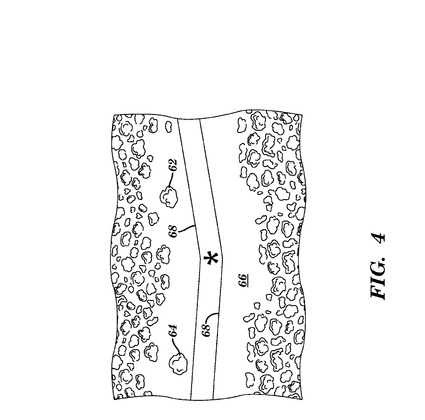
【図4】多角形を作ることにより中で目標植生が識別されるLiDARデータセットの実施例を略図で図解する。
【図5】関心のある対象に対する第1及び第2検出データセット内の目標植生の属性と考えられる第1及び第2統計値の実施例を略図で図解する。
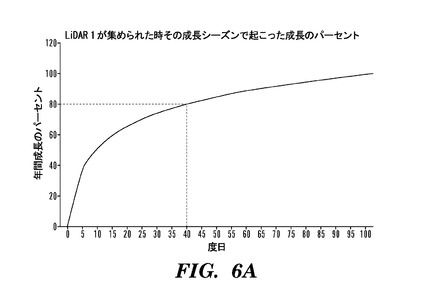
【図6A】度日(degree days)の関数として年間植生成長のパーセントをプロットするグラフの1実施例を図解する。
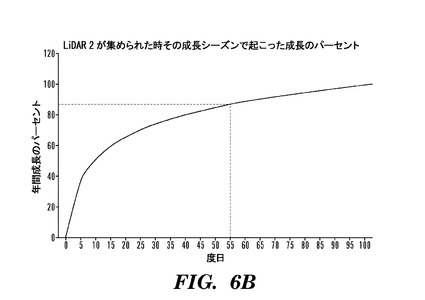
【図6B】度日の関数として年間植生成長のパーセントをプロットするグラフのもう1つ実施例を図解する。
【図7】関心のある対象について侵入マップを表示するグラフィカルユーザーインターフエース(GUI)の1実施例を略図で図解する。
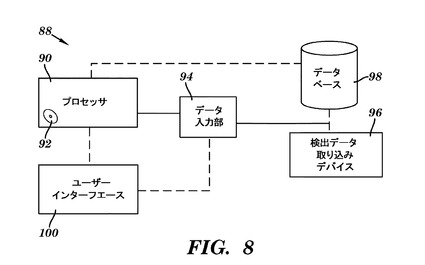
【図8】関心のある対象に対する植生成長を見積もるシステムの実施例を略図で図解する。
【図9】関心のある対象に対する植生成長を見積もるシステムのもう1つの実施例を略図で図解する。
【図10】勧告する軽減の種類を決定するために、目標植生侵入方向が中でテストされるLiDARデータセットの断面図の実施例を略図で図解する。
【0009】
明確化の目的で、そして適当と考えられた場合、対応する特徴を示すために、図中では参照数字が繰り返され、そして該特徴を良く示すために図中では種々の要素が必ずしもスケール合わせして画かれてないことは評価されるであろう。
【実施例1】
【0010】
幾つかの異なる成長速度がここでは言及される。用語“相対成長速度”は目標植生が関心のある対象に向かって成長しつつある速度を呼ぶ。用語“侵入速度(encroachment rates)”は用語“相対成長速度”と互換可能に使われてもよい。用語“相対成長”(“侵入成長”とも呼ばれる)が使われてもよく、それは2つの対象間の関係で最小距離の変化を引き起こす成長である。用語“年間成長速度”は1年当たりの成長を意味する。該年間成長速度は高さ、相対成長、又は何等かの他の成長について決定されてもよい。用語“間隙”は関心のある対象と問題の植生(又は他の対象)の間の最小距離を意味する。
【0011】
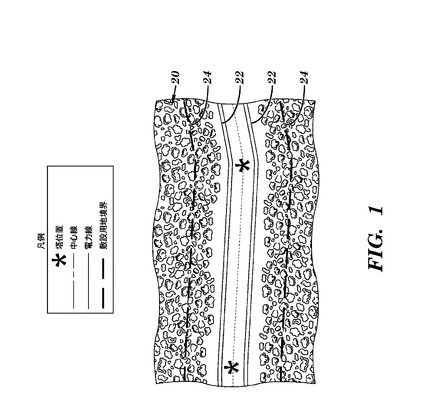
図1は植生成長を見積もる方法及びシステムで使われる公知の電力線導体位置22と敷設用地(ROW)境界線24を有する検出データセット20の実施例を略図で図解する。該検出データセット20は好ましくは木の上から空中で集めた3次元データセットであるのがよいが、或る実施例は地上ベース検出データセット収集技術を利用してもよい。この図では、LiDARセンサーからの分類された3次元点クラウドデータセットが、ラスターマップに変型されており、植生高さを画素のグレイスケール値として示している。明るいグレイスケール値ほど高い植生を表しており、黒い値は植生が無いことを表す。この白黒の線画での図解を容易にするために、グレイスケール化された樹木によりカバーされない敷設用地の境界線24の間の空いた範囲は、LiDARデータセット内のこの様な範囲が黒で示されるのが典型的であるが、白として示される。ここで空いた敷設用地の範囲が他の構造体が図解されるように白で示される。なお他の実施例は、空中及び地上ベースの検出データ収集技術の組み合わせを使用してもよい。該検出データセット20は、光検出及び測距(LiDAR)データ(時に“レーザー走査データ”と呼ばれるもの)、レーダーデータ、合成開口レーダーデータ、距離測定用走査及び3次元点クラウド提供に基づく何等かのセンサーからのデータ、を含むが、それらに限定されない様な種々のデータの種類を含んでもよい。該検出データセット20は、デジタル画像形成、ビデオ又はハイパースペクトラル画像形成データの様な他のデータセットによりサポートされてもよい。簡便のため、該検出データセット20はLiDARデータと呼ばれることが多いが、他の形式のデータも請求される発明の範囲内で検出データとして使うために好適であることは理解されるべきである。該検出データセット20はポジショニングデータ、例えば検出データセット内で対象の座標位置が既知となるようなグローバルポジショニングシステム(GPS)データを含んでもよい。加えて、該検出データセット20は既知のユーティリティシステム位置と組み合わされてもよい。図1の実施例では、該電力線位置22と敷設用地境界線24への参照も行われてもよいように既知の電力線導体位置22と敷設用地境界24が該検出データセットと組み合わされた。当業者は、電力線導体の様な、ユーティリティ対象を、それらの寸法と位置についてモデル化され、検出データセット20と組み合わされることを可能にする、多くの商業的に入手可能な製品を熟知している。この様なユーティリティ対象も、例えば沈下する氷の条件下にある時、何処に電力線があるかを示す様に、種々の天候及び負荷条件をシミュレートするためモデル化されてもよい。
【0012】
図2A−2Cは関心のある対象に対する植生成長を見積もる方法の1実施例を図解する。オプションでは、第1検出データセットが集められ26,第2検出データセットが集められる28。前に述べた様に、該第1及び第2検出データセットは好ましくは各々が空中から及び/又は地上から集められた3次元データセットであるのがよい。検出データセットの好適な例は、光検出及び測距(LiDAR)データ(時に“レーザー走査データ”とも呼ばれるもの)、レーダーデータ、合成開口レーダーデータ、距離測定走査及び3次元点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、又はハイパースペクトラル画像形成を含むが、それらに限定されない。或る実施例では、該検出データセットの1つ以上が既に利用可能であってもよく、例えば、もし該1つ以上の検出データセットがどこかに記憶されていれば、集められる必要はない。該検出データセットは、静止画像形成、カラー−赤外線画像形成、熱的画像形成又はハイパースペクトラル画像形成の様な他のデータセットによりサポートされてもよい。この様なサポート用データセットは、例えば、該検出データを真に迫るカラーで、或いは恐らく熱的痕跡、化学的組成、材料組成、他の様な、或る他の検出特性にマップ化するカラーで、カラー化するため使われてもよい。加えて、オプションのサポート用データセットは代わりに、3次元データ点の現実のカラー値を反映するために、3次元点応答の頂上に投影されてもよい。これは画像特徴の容易な識別を可能にする。或る実施例では、該オプションのサポート用データセットは検出データセットから目標樹木に相関を取られたスライスデータを提供する地上ベースのデータであてもよい。従って、該第1及び第2検出データセットの各々はオプションで1つ以上のサポート用データセットを有してもよい。該第2検出データセットは該第1検出データセットの後の時刻に集められたデータに対応する。或る実施例では、第1データセット及び第2データセットが集められた時の間の時間は約1成長シーズンであるが、しかしながら、他の実施例はより短い又はより長い時間を使ってもよい。
【0013】
或る状況では、該第1検出データセット及び/又は第2検出データセットは植生応答(vegetation returns)でない1つ以上のデータ点を有してもよい。ほんの二、三の例として、検出データセットは大地応答、水応答、及び/又は電力線導体応答を有してもよい。従って、或る実施例では、植生応答を識別するために第1及び/又は第2検出データセットを分類することがオプションとして望ましい29。該分類過程に依り、該植生応答のみが次の過程で使われる、又は非植生応答が捨てられる、ように該植生応答が植生応答としてフラグを立てられてもよい。下記本文で該第1検出データセット又は第2検出データセットを参照する時、従って、1)該集められた又は記憶された検出データセットが既に植生応答を有したもののみだった、2)該集められた又は記憶された検出データセットが植生応答だけ使用するためフラグを立てるよう分類された、又は3)該集められた又は記憶された検出データセットが非植生応答を除外するよう分類された、の何れかなので、該植生応答のみが該第1及び第2検出データセット内で使われると仮定される。
【0014】
目標植生は第2検出データセットから識別される30。或る実施例では、該目標植生は、該第2検出データセット内の該目標植生の1つ以上の点を含む第2検出データセットからの植生多角形を識別すること32により識別されてもよい30。多角形形成を通しての樹木植生の識別は当業者には良く理解される。ほんの1例として、1つ以上の多角形は、1)各植生応答の大地レベルから高度を識別する;2)該植生応答上に水平に空間的に基準化されたラスターメッシュを置く;3)該ラスター内で各セル内部で大地から最高、平
均、又は他の統計的高度を読む;4)植生クラス内で有効な応答を有しないラスターセルに、0値を与える;5)最終ラスターが植生高さラスターと呼ばれる;6)該植生高さラスターに、成長抑制−領域拡張法アルゴリズム又はそのより複雑な派生品を適用し、1つ以上の多角形に帰着する、ことにより第2データセットの植生応答から形成されてもよい。
【0015】
該識別された目標植生は、必ずしも多角形である必要のない、植生データコンテナー内に落下するよう考慮されてもよい。該植生データコンテナーは多角形、単一画素又は画素のグループ、格子セル又は分析用に形成される他の形の空間的データ実体であってもよい。分析されるべき植生を含むこれらの空間的実体は目標植生形状と呼ばれてもよい。
【0016】
該対応する目標植生は該第1検出データセットから識別される34。該第2検出データセットから該目標植生を識別するため使われる該植生データコンテナー又は目標植生形状は、該第1検出データセットから該対応する目標植生を識別するために34該第1検出データデータセット上に重ね合わされる。ほんの1例として、もし植生多角形が該第2検出データセットから識別されたなら、該第2検出データセットからの該植生多角形は、該第1検出データセット内の対応する目標植生の1つ以上の点を選択するために使われてもよい36。
【0017】
第1統計値は、関心のある対象に対する第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる38。該関心のある対象は、電力線、鉄道軌道、鉄道頭上導体、電話線、道路、通信ケーブル、高速道路面、そして道路標識視認セクター、の様な、しかしそれらに限定されない、種々の対象であってもよい。関心のある対象はまた、対象の周りの安全緩衝ゾーンを含んでもよい。該第1検出データセット内の1つ以上のデータ点は、例えば、上記ステップ36で植生多角形を使うことにより、識別される様に、該対応する目標植生に属する。或る実施例では、該対応する目標植生の属性と考えられる38第1統計値は、該第1検出データセット内の該対応する目標植生に属すると識別された該1つ以上のデータ点の各々から、該関心のある対象までの距離を計算することにより決定される。該対応する目標植生の属性と考えられる38第1統計値は、次いで該識別された第1検出データセット点の各々から該関心のある対象までの、これらの計算距離に基づいてもよい。例えば、或る実施例では、該対応する目標植生の属性と考えられる38第1統計値は、該識別された第1検出データセット点の各々から該関心のある対象までの計算距離のセットの最小距離であってもよい。他の実施例では、該対応する目標植生の属性と考えられる第1統計値は、該関心のある対象までのN個の最も近いと識別された第1検出データセット点の平均であってもよい。他の実施例では、該第1検出データセットの該対応する目標植生に属するとして識別されて来た該1つ以上のデータ点の各々からの距離を計算するよりも寧ろ、該第1検出データセット内の植生データ点の全部からの距離が最初に計算され、次いで第1検出データセット内の該対応する目標植生に属するとして識別された計算が、該対応する目標植生の属性と考えられる38第1統計値を決定するために使われてもよい。
【0018】
或る実施例では、該第1及び第2データセットの収集の間でセンサーの種類又は収集パラメーターが変化したために、該第1及び第2検出データセットを校正することが望ましい。センサー校正は、同時に両方のセンサー/パラメーターを用いて植生のサンプル片を集め、結果を比較する、ことにより行われてもよい。これは或る実施例では、該2つのセンサータイプでの植生読みの間のマップ化を行うために使われてもよい。
【0019】
第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる40。該第2検出データセット内の1つ以上のデータ点は、例えば上記ステップ32の植生多角形の識別により、識別
される様に該目標植生に属する。或る実施例では、該目標植生の属性と考えられる40第2統計値は、該第2検出データセット内の目標植生に属するとして識別されて来た該1つ以上のデータ点の各々から関心のある対象までの距離を計算することにより決められる。該目標植生の属性と考えられる40第2統計値は次いで、該識別された第2検出データセット点の各々から関心のある対象までのこれら計算距離に基づいてもよい。例えば、或る実施例では、該目標植生の属性と考えられる40第2統計値は該識別された第2検出データセット点の各々から関心のある対象までの計算された距離のセットの最小距離であってもよい。他の実施例では、該目標植生の属性と考えられる該第2統計値は、関心のある対象までの、N個の最も近い識別された第2検出データセット点の平均であってもよい。他の実施例では、該第2検出データセットの目標植生に属するとして識別されて来た該1つ以上のデータ点の各々からの距離を計算するよりも寧ろ、該第2検出データセット内の植生データ点の全部からの距離が最初に計算され、次いで該第2検出データセット内の該目標植生に属するとして識別された計算が、該目標植生の属性と考えられる40第2統計値を決定するために使われてもよい。
【0020】
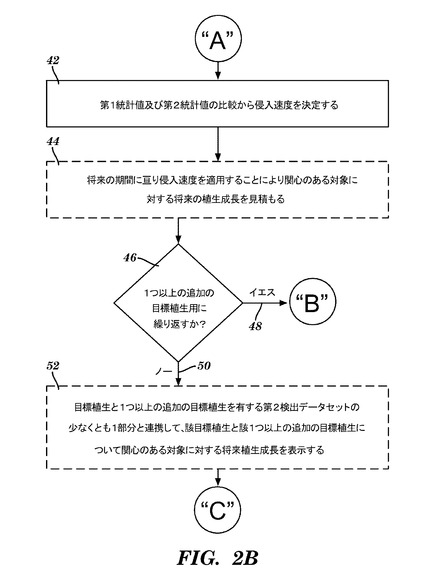
図2Bの方法を続けると、侵入速度は該第1統計値及び第2統計値の比較から決定されてもよい42。該侵入速度は該目標植生が関心のある対象に向かって成長しつつある速度である。この様であるから、該侵入速度は、他の対象に関連しない従来の樹木成長速度とは非常に異なる。或る実施例で、例えば、第1検出データセット及び第2検出データセットが約1成長シーズン離れて集められた実施例では、該侵入速度は第1統計値及び第2統計値の間の差を取り、その差を約1成長シーズンにより割ることによって該目標植生用に決められる。他の実施例は該成長シーズン中に概略同時には集められない第1及び第2検出データセットを考慮してもよい。植生成長速度は該成長シーズン中に変わり、該変化は或る実施例では、全年間成長の各成長シーズン日の相対部分を予測するために、成長シーズン中の高さ成長モデルを使うことにより斟酌されてもよい。
【0021】
度日カーブ(Degree day curves)は特定の地域又は天候ゾーン内で、特定樹種又は木のタイプについて成長シーズン全体の間の成長(高さ)パーセンテージを度日数の関数としてプロットする。1成長シーズン中達成される度日数はシーズンからシーズンまでで、そして地理学的位置に依り変わる。問題の成長シーズン用に特定時間向けカーブが利用可能でないならば、ローカルの年毎の平均したカーブが使われるべきである。該カーブは特定種向けであってもよく、全ての種用又はハードウッド(hardwoods)の様な種グループ用に均一であってもよく、一層特定的なカーブは一層精密な測定値を与える。度日カーブの例は計算例に関連して後で図解される。もう1つの例として、或る実施例は、下式を使うことにより該第1統計値及び第2統計値の比較から侵入速度Gaを決定し42、該式は該第2統計値と該第1統計値の間の差を取り、その差を下記で表現される量で割り算しており、
【数1】

ここで
Gaは目標植生の年間侵入速度を有し、
D2は該目標植生の属性と考えられる第2統計値を有し
D1は該目標植生の属性と考えられる第1統計値を有し
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nは第1検出データセットと第2検出データセットの収集間の完全成長シーズン数を有する。ここの式で使われる時、“完全成長シーズン”は、春から秋までの全体として該LiDARデータセット間に起こった成長シーズンである。部分的成長シーズンは該LiDAR収集によりカットされた成長シーズンである。
【0022】
或る実施例では、該侵入速度は、第1及び第2検出データセットから決定される該侵入速度を有効化し、調整するよう求める現地測定成長データに基づき校正されてもよい。
【0023】
次いで関心のある対象に対する将来植生成長は、将来の期間に亘り該侵入速度を適用することにより見積もられてもよい44。例えば、或る実施例では、関心のある対象に対する将来成長は、将来時の目標植生と関心のある対象の間の間隙距離を決定するため使われてもよい。この様に見積もられる又は予測される間隙は下記で表され、
DT=D2+Ga*(100%−P2+100%*m+PT) (2)
ここで
DTは将来時の目標植生と関心のある対象の間の間隙距離を有し、
D2は第2統計値を有し、
Gaは侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは第2検出データセットの収集と将来時の間の完全成長シーズン数を有する。ここでこの式で使われる時、“完全成長シーズン数”は春から秋までの全体としてLiDARデータセット間で起こった成長シーズンである。部分的成長シーズンは該LiDAR収集によりカットされた成長シーズンであり、そして
PTは将来時に過ぎた成長シーズン度日のパーセンテージを有する。
【0024】
1つ以上の追加の目標木用に該処理を繰り返すか否かの決定46が行われる。もし該処理が1つ以上の追加の目標木用に繰り返されるなら48、ステップ32及び36での追加目標植生の識別でスタートする該過程が繰り返される。代わりに、該過程は1つ以上の追加目標木用に繰り返される必要がない50。なお他の実施例では、アクション38−42及びオプションの44がバッチ処理として進められてもよい。例えば、多数の目標植生の場合は第2検出データセットから1ステップで識別されてもよい。次いで対応する目標植生の多数の対応する場合が該第1検出データセットから識別される。目標植生及び対応する目標植生の対の1つの場合の属性として第1及び第2統計値を考える代わりに、多数の対が、第1及び第2統計値の多数の対を得るバッチの部分として処理されてもよい。かくして、この様なバッチ実施例では、侵入速度は、バッチ取扱いなのでその過程を繰り返す必要無しに、識別された多数の目標植生の各々用に決定される。
【0025】
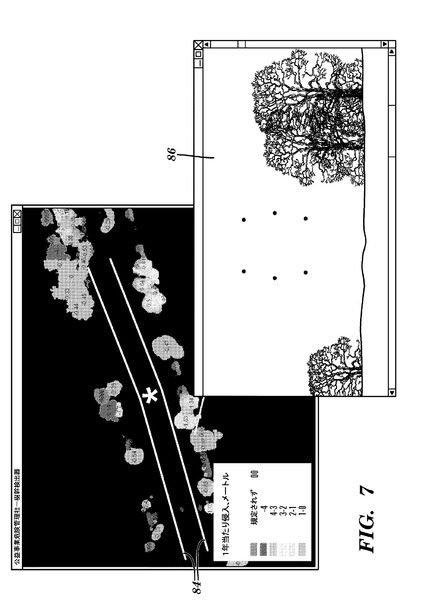
実施例に依っては、或るオプション的アクションが上記説明の方法で含まれてもよい。オプションでは、該関心のある対象に対する将来植生成長が、該目標植生及び該1つ以上の追加の目標植生を含む該第2検出データセットの少なくとも1部分と連携して、該目標植生及び該1つ以上の追加の目標植生用に、表示されてもよい52。この様な表示の実施例は図7と関連して論じられる。1使用例として、将来の期間(例えば、次の5年)用に、各木について導体までの最小安全距離を保持するために必要なカット量を見出すよう該決定情報及び/又は表示情報が使われる。大規模には、トリミング作業で、余りに詳細なデータの使用は非生産的になるので、現地仕事の仕様を規定するのに、距離は木ベースでなく、範囲ベースで使用されてもよい。
【0026】
図2Cの方法を続けると、もし該関心のある対象に対する目標植生の将来の植生成長が、将来時に、該関心のある対象と交差する目標植生に帰着するだろうと見積もられるならば54、
・ユーザーに該将来時の関心のある対象との見積もられる将来交差を知らせる、
・該目標植生と該関心のある対象との間の見積もられる将来の相互作用を説明する相互作用表記録を植生データベースに属させる、
・マップ上の目標植生に、該関心のある対象との見積もられる将来交差の故にサービスを要するとフラグを立てる、
・該目標植生を軽減させる作業注文を発生する、様なアクションが取られてもよい。{ここで用いられる時、軽減(mitigation)は全植生除去、刈り取り(小さな植生の除去)、枝打ち、枝全体の除去、トリミング、枝の望ましい形へのカット、化学的処理(例えば、植生を殺すための除草剤の使用、かくしてその更に成長するのを止める)、或いは樹皮剥ぎ取り(長期進行で木の死へ導く)を呼ぶ}。
【0027】
ここで使われる時、“関心のある対象”は該関心のある対象の周りの緩衝ゾーン或いは安全ゾーンも含むことは注意すべきである。
【0028】
例示実施例
具体的方法を実行するために、第1及び第2検出データセットが集められる。この例では、該検出データセットは異なる時期に、例えば、概略1成長シーズン離して、集められたLiDARデータセットであってもよい。簡単のために、この例の第1検出データセットはLiDAR1と呼ばれ、第2検出データセットはLiDAR2と呼ばれる。該LiDAR1とLiDAR2は植生、土地及び他の応答を相互に分けるよう分類されてもよい。図3の断面LiDARデータ図で略図的に図解される様な、この種の分類を行う商業的なソフトウエア製品が存在する。導体56からのLiDAR応答は大地58及び植生60からとは異なるよう分類されてもよい。ここで使われる時、用語“植生”は木、やぶ、かん木及び植物を含むがそれらに限定されないことは注目すべきである。
【0029】
図4はLiDAR2検出データセットの実施例を略図的に図解し、該データセット内では、目標植生は、例えば、分析単位として働く植生多角形62及び64の様な、植生多角形を作ることにより識別される。この実施例では、各植生多角形は植生イベント(LiDAR植生応答)を有し、該イベントは植生多角形に付随する目標植生の部分として分析されるべきである。該植生多角形形成時、大地応答66及び導体応答68の様な、該LiDARデータ内の非植生応答型(もしあれば)は無視されてもよい。上記説明の様に、例えば、該多角形はラスター化されたLiDAR植生高さモデルから作られてもよい。植生高さモデルはLiDARからの最高植生応答と、同じLiDARデータから決められた大地レベルとの間の高度差を示すラスターである。この様な実施例では、分析されるべきラスター範囲は正方形画素に分けられ、該画素の各々は画素内の植生高さを表すグレイスケール値を与えられる。画素内の植生高さを予測するために、最高高さのみならず、該植生高さの百分率も使われてもよい。普通の実施例では、LiDAR応答の最大高さが使われる。多角形を自動的に形成する公知の技術の或る例は、成長抑制領域拡張法(growth−constrained seeded region growing method)及び抑制谷追跡アルゴリズム(constrained valley−following algorithm)を含むがそれらに限定されない。多角形化用の他の技術は当業者には公知である。
【0030】
この例では、植生成長は導体68(この例の関心のある対象)に対して見積もられる。関心のある対象(この例の)を表すためにLiDAR導体データ68が使われてもよく、或いは該LiDAR導体データはオプションで分析されるべき導体の3次元(3D)モデルを作るため使われてもよい。関心のある対象のこの様なモデルを作る商業的ソフトウエア製品が存在し、当業者には公知である。該最終モデルは例えば、3次元ベクトル−モデルであってもよい。現地測量の様な他のデータ源から作られる、現存の3次元モデルも同様に使われてもよい。例えば、種々の沈下/揺れシナリオでのその起こり得る位置をシミュレートするために、関心のある対象(この場合では、導体)のシナリオ分析が行われてもよい。シナリオ分析は作業する方法用には必要ではないが、関心のある対象に対し見積もられる植生成長の精度を改善するかも知れない。沈下/揺れシナリオは時には“天候の状態”と呼ばれ、この様な沈下/揺れシナリオは商業的ソフトウエアパッケージでモデル化されてもよい。
【0031】
本例でこの点まで、目標植生は、1つ以上の植生多角形を識別する多角形化法を使って、第2検出データセット(LiDAR2)から識別されて来た。対応する目標植生は、該第1検出データセット内の1つ以上の対応する目標植生の対応する点を選択するために、例えば、第2検出データセットからの該1つ以上の植生多角形を使うことにより、該第1検出データセットから識別されてもよい。或る実施例では、該1つ以上の植生多角形内の植生応答用の距離計算を行うことのみにより、該検出データセット上で行われる必要のある距離計算数を減じるために、該1つ以上の植生多角形が使われてもよく、この実施例では、該距離計算は該関心のある対象への全植生応答について行われる。次いで、該1つ以上の植生多角形は、どの距離計算が、統計値を該目標植生の属性と考える目的で、該目標植生に属するかを選択するため使用される。図5は、第1及び第2統計値を、関心のある対象に対するLiDAR1及びLiDAR2検出データセット内の目標植生の属性と考える過程を略図で図解する。図5で関心のある対象は最も低い導体70である。説明を容易にするために、該LiDAR1データセットと該LiDAR2データセットはこの図で重なり合っている。該LiDAR1データセット植生は大きいデータ点として示され、LiDAR2データセット植生は小さなデータ点として示される。この図で植生多角形72が図解されている。該LiDAR2データセットはLiDAR1データセットより遅い時点で取り上げられ、該LiDAR2データがLiDAR1データセットより更に外へ延びるので、該データは該目標植生76の介入する成長を反映する。
【0032】
対象までの距離で帰属させられた、LiDAR1からのデータセット点(大きなLiDARデータ点)は、植生多角形内で、第1統計値を目標植生76の属性と考えるよう分析される。この例で、該第1統計値は該LiDAR1目標植生76から関心のある対象70までの最短距離(矢印78で図解)である。その多角形内のLiDAR2(小さなLiDARデータ点)からのデータセット点は同様の仕方で第2統計値を目標植生76の属性と考えるよう分析される。この例で、該第2統計値は該LiDAR2目標植生76から関心のある対象70までの最短距離(矢印80により図解)である。成長により、LiDAR1及びLiDAR2内の目標植生の同じ枝は関心のある対象70までの最短距離を提供する枝であったり、又はなかったりすることを注目すべきである。
【0033】
侵入速度は該第1統計値及び第2統計値の比較から決められる。この例のために、LiDAR1及びLiDAR2のデータセットが連続する年に、各年の成長シーズンの中程近くで、集められたと仮定しよう。図6Aの例示する度日カーブ内で図解される様に、LiDAR1はその成長シーズン中40度日が過ぎた時集められた。図6Bの例示度日カーブで図解される様に、LiDAR2はその成長シーズン中55度日が過ぎた時集められた。図6A及び6Bは、特定気候ゾーンで分析される特定種類の植生について度日(dd)の関数としての年間成長パーセンテージの略図式の典型的カーブを示す。この様なカーブは局地的生物学的条件に適合され、より局地的カーブ程より精密な測定値を生じる。この方法では、もし侵入成長カーブが利用出来ないなら、侵入の成長を見積もる説明過程で高さ成長カーブが使われてもよい。当業者による選択用に多くの種々の高さ成長カーブが利用可能である。使われるべきカーブは、典型的年間合計熱量、年間降雨量、土壌生産性及びその地域内の優占種、に基づき選択される。該カーブは局地化される必要はないが、もし出来るだけ最良の精度が望ましいなら、局地的条件に適合されてもよい。既述の様に、この例では、該LiDAR1データセットはその成長シーズンで40ddが既に過ぎた時集められた。図6Aで該カーブを読むと、これは年間成長の80%に対応する。従って、その年の年間成長の残り20%は該LiDAR1が集められた後に起こると仮定されてもよい。また、述べた様に、この例では、LiDAR2のデータセットはその成長シーズンで既に55ddが過ぎた時に集められた。図6Bのカーブを読むと、これは年間成長の約88%に対応する。従って、その年の年間成長の残り12%は該LiDAR2が集められた後に起こると仮定される。LiDAR1データセット用の第1統計値(この例では、導体までの第1の最小距離)は約2.90m(9.5フィート)であると決定された。LiDAR2データセット用の第2統計値(この例では、導体までの第2最小距離)は約1.95m(6.4フィート)であると決定された。
【0034】
従って、該侵入速度は、例えば、前に論じた式(1)を使うことにより、該第1及び第2統計値の比較から決定される:
【数2】
【0035】
第2統計値D2=約1.95m(6.4フィート)であり、第1統計D1=約2.90m(9.5フィート)であり、LiDAR1が集められた時過ぎた成長シーズン度日のパーセンテージP1=80%であり、LiDAR2が集められた時過ぎた成長シーズン度日のパーセンテージP2=88%であり、そしてLiDAR1とLiDAR2の収集の間の完全成長シーズン数n=0であるので、我々は年間侵入速度Gaは下記の様に決定出来る:
Ga=(約6.4*0.3048−9.5*0.3048)m/{(100%−80%)+100%*0+88%}
Ga=(−3.1*0.3048m)/108%=−2.87*0.3048m/成長年=−0.875m/成長年
【0036】
最後に、我々は関心のある対象、この場合は導体、に対する将来植生成長を見積もることが出来る。例えば、もし我々が1完全成長シーズンと30度日(dd)後に如何に該目標植生が該導体に近いかを知ろうと欲するなら、我々は上記で論じた式(2)を使うことが出来る:
DT=D2+Ga*(100%−P2+100%*m+PT) (2)
【0037】
第2統計値D2=約1.95m(6.4フィート)であり、年間侵入速度Ga=約−0.875m(2.87フィート)/成長年であり、LiDAR2が集められた時過ぎた成長シーズン度日のパーセンテージP2=88%であり、LiDAR2の収集と将来時の間の完全成長シーズン数m=1であり、そして将来時に過ぎる成長シーズン度日のパーセンテージPT=72%(図6Bの成長カーブを見ると、30度日は年間成長の72%に対応すると見られる)なので、我々は将来時の目標植生と導体の間の距離DTを下記の様に見積もることが出来る:
DT=6.4*0.3048m+(−2.87*0.3048m)*(100%−88%+100%*1+72%)=3.13*0.3048m=0.954m
【0038】
関心のある対象に対する植生成長を見積もる方法の実施例は多数目標植生に適用されてもよい。植生成長見積の結果は種々の方法で、例えばグラフィカルユーザーインターフエース(GUI)を介して、ユーザーに表示される。図7は、関心のある対象(この場合、電力線84)についての侵入マップを表示するGUI82の実施例を略図で図解する。陰影付きの多角形は分析される種々の目標植生を示す。見積もられる侵入は、各植生の属性と考えられる第1及び第2統計値と、線導体に関する侵入速度と、により、植生間で変わる。GUI82上の負値は侵入する植生を意味する。選択された多角形の更に進んだ詳細を示すために該GUI82内に副ウインドウ86が提供される。
【0039】
図8は関心のある対象に対する植生成長を見積もるシステム88の実施例を略図で図解する。該システム88はプロセッサ90を有し、該プロセッサは1)第1検出データセットから目標植生を識別し、2)第2検出データセット内の該目標植生を識別し、該第2検出データセットは該第1検出データセットより後れた時刻に収集されて、該第2検出データセット内で識別し、3)第1統計値を、該関心のある対象に対する該第1検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え、4)第2統計値を、該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え、5)該第1及び第2統計値の比較から侵入速度を決定し、そして6)該侵入速度を将来の期間に亘り適用することにより該関心のある対象に対する将来の植生成長を見積もる、ように構成される。これらのアクションを達成する適当なアクションの実施例が上記で開示された。該プロセッサ90は、CD、磁気テープ、光学的ドライブ、DVD、ハードドライブ、フラッシュドライブ、メモリーカード、メモリーチップ、又は何等かの他のコンピュータが読み出し可能な記憶媒体、の様な、しかしそれらに限定されない、コンピュータが読み出し可能な記憶媒体92上に記憶された機械読み出し可能なインストラクションを実行するコンピュータであってもよい。該プロセッサ90は、代わりに、又は加えて、ラップトップ又はデスクトップコンピュータ、マイクロプロセッサ、特定用途向け集積回路(ASIC)、デジタル部品、アナログ部品又はそれらの何等かの組み合わせ及び/又は複数品を有してもよい。該プロセッサ90はスタンドアロンのユニットであってもよく、或いはデバイスの分散型セットであってもよい。
【0040】
データ入力部94はプロセッサ90に接続され、該プロセッサ90に少なくとも第1検出データセット及び第2検出データセットを提供するよう構成される。検出データ取り込みデバイス96はオプションで第1及び第2検出データセットのライブの取り込みを可能にするために該データ入力部94に接続される。検出データ取り込みデバイスの例は、全波、多数応答又は最初と最後のパルス記録式LiDARセンサーを含むがそれらに限定されない。同様に、データベース98はオプションで、1つ以上の前に取り込まれた第1及び/又は第2検出データセットを該プロセッサ90に提供するために該データ入力部94に接続されてもよい。データベース98は生データ又はフォーマットされたフアイルを保持するメモリーデバイス程簡単であってもよく、或いはデータベース98は複雑なリレーショナルデータベースであってもよい。実施例に依って、該データ入力部94に接続されるのは、1つ又は多数のデータベース98及び/又は検出データ取り込みデバイス96であるか、又は検出データ取り込みデバイス96のみであってもよい。該検出データ取り込みデバイス96が該データ入力部94に接続されるのは、有線接続、光接続、又は無線接続による。無線接続の適当な例は、802.11xプロトコル又はBluetooth(登録商標)プロトコルを使う無線周波接続を含むが、それに限定されない。更に、データベース98を有する実施例では、プロセッサ90は結果を記憶するため、又は該データ入力部94をバイパスすることによりデータにアクセスするため、データベース98に接続されてもよい。
【0041】
システム88はまた、プロセッサ90及び/又はデータ入力部94の何れかに接続されてもよいユーザーインターフエース100を有する。1例として、該ユーザーインターフエース100は、第1及び/又は第2検出データセット、関心のある対象、該関心のある対象に対するそれぞれ第1及び第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、目標植生の属性と考えられる第1及び/又は第2統計値、そして該関心のある対象に対する見積もられた将来植生成長、を表示するよう構成されてもよい。該ユーザーインターフエース100はまた、ユーザーが、該データ入力部94に接続されたデータベース98から第1及び/又は第2検出データセットを選択する、又は該データ入力部94に接続された検出データ取り込みデバイス96からのデータの収集をスタートし、停止する、ことを可能にするよう構成されてもよい。
【0042】
図9は関心のある対象に対する植生成長を見積もるシステム102のもう1つの実施例を略図で図解する。この実施例で、プロセッサ90はネットワーク104上でデータ入力部94と接続される遠隔プロセッサであるようセットアップされる。該ネットワーク104は有線又は無線のローカルエリヤネットワーク(LAN又はWLAN)であってもよく、或いはネットワーク104はデータを受けたり、送ったりするために何等かの数の通信プロトコルを使う有線又は無線のワイドエリヤネットワーク(WAN又はWWAN)であってもよい。該プロセッサ90が遠隔に配置されるシステム102を有することは、多数クライアント側データ入力部94が該プロセッサ90のリソースを共有することを可能にする。第1及び第2検出データセットは、データベース98から及び/又は該データ入力部94に接続されたユーザーインターフエース100の制御下の検出データ取り込みデバイス96から、データ入力部94により得られてもよい。該第1及び第2検出データセットは次いで該ネットワーク104上を該プロセッサ90へ転送され、該プロセッサは次いで、1)第1検出データセットから目標植生を識別し、2)該第2検出データセット内の該目標植生を識別し、該第2検出データセットが該第1検出データセットより後れた時刻に収集され、該目標植生を識別し、3)第1統計値を、関心のある対象に対する、該第1検出データセット内の該目標植生の1つ以上の点の距離に基づき該目標植生の属性と考え、4)第2統計値を、該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき該目標植生の属性と考え、5)該第1統計値及び第2統計値の比較から侵入速度を決定し、6)該侵入速度を将来の期間に亘り適用することにより該関心のある対象に対する将来植生成長を見積もり、そして7)該関心のある対象に対する該見積もられた将来植生成長を有するデータ信号106をクライアント側へ送信してもよい。この様なデータ伝送は有線ケーブル、光ケーブル、及び空中の様な種々の伝送媒体上で起こってもよい。この実施例では、該遠隔のプロセッサ90は、クライアント側のハードウエアのコストを下げるのを助けるため使われてもよく、そして中央にアップグレードされた点があるので、プロセッサへの、又は該プロセッサにより行われつつあるインストラクションへの、何等かのアップグレードを容易にする。
【0043】
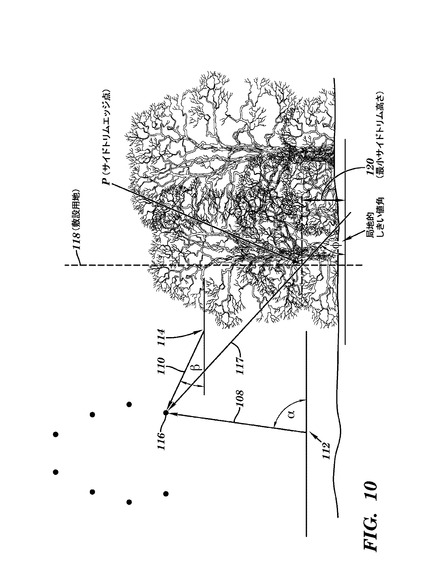
上記説明の様に、図2Cに関連して、関心のある対象に対する目標植生の将来植生成長が、将来時に関心のある対象と交差する目標植生に帰着することが見積もられるならば、該目標植生を軽減させる作業注文が発生されてもよい。作業注文の1部として、或る実施例はまた、例えば、刈り取り、カット、トリミング又は植生除去を含むが、それらに限定されない軽減の種類を勧告してもよい。図10は、中で、勧告される軽減の種類を決定するため、目標植生侵入方向がテストされLiDARデータセットの断面図の実施例を略図で図解する。侵入方向ベクトルの例108,110はそれぞれ植生点112及び114から突出するよう示され、最も近い電力線導体点116を指している。1実施例では、各多角形内の植生応答は、該植生の導体までの距離に基づき再び分類される。侵入成長と望まれる間隙の年数とに基づき、トリムされる必要のある点が、それら自身のクラスに分けられる。それらの点の重力中心が除去の中心として考慮される。除去中心から最も近い導体点までの方向ベクトルが画かれる。このベクトルは該植生が該導体へ近付く角度を規定す
る。代わりに、方向ベクトルは植生の最近点と対応するラインの間で、この順序で画かれてもよい。α及びβは、対応するベクトルが水平線と交差する時形成されるベクトル角を表す。局部的しきい値角度と呼ばれる角度Φは局部的しきい値ベクトル117と水平線の間に形成される角度を表す。該局部的しきい値ベクトル117はサイドトリムエッジ点(P)と関心のある対象とを通過する(この例では、最も近い導体点116)。Pは最小サイドトリム高さ120の高度で、分析される植生点と最も近い導体点を通る垂直面内の、敷設用地エッジ118の点である。最小サイドトリム高さは、ローカルのトリム職人が、彼等の工具と樹木刈り取り能力に基づき、規定するパラメーターである。該最小サイドトリム高さは刈り取り熟練で除去することが現実的でない植生高さに設定されるべきである。軽減の種類を決めるために、α及びβは局部的しきい値角度Фと個別に比較される。もしαが該しきい値角度Фより大きく決定されるなら、αに付随する植生点112はアンダーカット植生として考えられ、軽減するために刈り取り又はカットを要する。もしαがしきい値角度Фより小さいと決定されるなら、αに付随する植生点112はサイド侵入として考えられ、サイドトリム又は樹木除去を要する。同じ方法がβをテストするため使われる。この断面図で見られる様に、αはФより大きく、植生点112に付随する植生の軽減用に刈り取り又はカットが必要であることを示している。βはФより小さく見られ、植生点114に付随する植生の軽減用にサイドトリム又は樹木除去が必要とされることを示している。
【0044】
かくして、関心のある対象に対する植生成長を見積もる方法とシステムの幾つかの実施例を説明したが、前記詳細な開示は例としてのみ提示されるよう意図されており、限定するためでないことは当業者に明らかである。明示的にここで述べられてないが、当業者に、種々の変更、改善及び変型が起こり、意図されるであろう。これらの変更、改善及び変型がここで示唆されるよう意図されても、それらは請求される発明の精神と範囲の中にある。例えば、具体化された方法とそれらの等価物を実行後、多数のLiDARデータセットは、例えば毎年1つ集められる。異なるデータセット間の相対成長速度の最終決定から、我々は相対成長速度の変動を、降雨と受けた合計熱の様な種々の予測変数の関数として分析してもよく、該関数はより良い予測能力を生ずる。
【0045】
加えて、処理要素の詳述した順序又はシーケンス、又は更に数、文字又は他の呼称の使用は、請求項で指定されているものを除けば、請求される過程を何等かの順序に限定するよう意図されてない。
【0046】
従って、請求される発明は下記請求項とそれらの等価物に依ってのみ限定される。
【技術分野】
【0001】
請求する発明は一般的にLiDARデータの様な検出データから樹木についての情報を決定する方法とシステムに関する。特に、該請求する発明は他の対象に対する植生の成長を見積もる方法とシステムに関する。
【0002】
版権
本特許文書の開示の1部分は版権保護を受ける資料を含んでいる。該版権所有人は、特許庁及びその商標部門の特許フアイル又は記録に開示特許が出る限りに於いては、何人によるフアクシミリ複製にも反対しないが、それ以外の場合は全版権を留保するものである。
【背景技術】
【0003】
多くの公益設備にとって、樹木は全ての予定しない供給停止の1番の原因である。台風時の電力供給システムへの大抵の損傷は電力線をサービス不能にする落下木又は枝により引き起こされる。供給システムへの樹木による損害の頻度を減じるのを助けるために、多くの公益事業者は保全対策として植生管理プログラムを実施している。北米公益事業者は、樹木接触導体に付随するサービス中断及び安全上の問題を防止する努力の中で植生管理に年間約5,600億円($7 billion)から約8,000億円($10 billion)を費やしている。
【0004】
従来、植生管理プログラムは、ユーティリティシステム周りの植生の管理を助けるアーボリストチームによる規則的監視及び枝打ちに頼って来たが、広大な距離をカバーする非常に多くのユーティリティラインは、多くの場合、地上監視チームの派遣を非現実的にする。結果として、多くの公益会社は、予想される植生成長問題用に調べられ得るユーティリティシステムの写真画像を提供する空中探索技術へ既に転換している。空中画像又はヘリコプターベースのラインパトロールは、公益用の敷設用地内へ侵入成長した植生を調べられるが、関心のある対象(object of interest)に対する植生の成長の見積に基づき、植生問題が発生する前に、該植生問題を予測出来る満足すべき方法又はシステムは未だ存在しない。公益会社は従来、植生や樹木の成長を、高さ、幹直径又は容積の成長として決定し、これらの成長速度から公益敷設用地に近い植生成長を予測するよう使われて来たが、この様な見積は該ユーティリティ(電力線の様な)に対する又はその間隙空間パターンに対する成長を提供しない。残念ながら、ライン間隙に対する成長は植生高さ、直径又は容積によりうまく規定されない。この知識不足は、必要な軽減法の種類すなわち刈り取り、カット、トリミング又は樹木除去、に関する時宜を得た、効率的な意志決定力を限定している。その結果、侵入を解決するため必要な保守の種類を決定するよう、現地職員が自身で現場を訪れる必要があることが多い。干渉軽減のコストは必要な保守の種類に非常に左右される。保守の種類に関する事前の知識不足のため効果的でない計画は資源を浪費し、必要以上のなすべき多くの仕事をもたらす。従って、電力線導体の様な関心のある対象に対する植生成長を決定し、公益設備に対する植生侵入の課題をより精密に予測するために、将来の間隙ニーヅを予測するよう、この成長を使う、経済的で、信頼出来て、使い易い方法とシステムを有することが望ましい。
【発明の概要】
【0005】
関心のある対象に対する植生成長を見積もる方法が開示される。目標植生が第2検出データセットから識別される。対応する目標植生が第1検出データセット内で識別され、該第1検出データセットは該第2検出データセットの前の時間に収集される。第1統計値が、関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の
点の距離に基づき、該対応する目標植生の属性と考えられる。第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる。侵入速度は該第1統計値と該第2統計値の比較から決定される。
【0006】
コンピュータ読み出し可能な記憶媒体も開示される。該コンピュータ読み出し可能な記憶媒体は、関心のある対象に対する植生成長を見積もるために該媒体上に記憶されたインストラクションを有する。該インストラクションは、プロセッサにより実行されると、該プロセッサに:1)第1検出データセットを提供させ、;2)第2検出データセットを提供させ;3)該第2検出データセットから目標植生を識別させ;4)該第1検出データセット内の対応する目標植生を識別させ、該第1検出データセットが該第2検出データセットの前の時間に収集されて、該対応する目標植生を識別させ;5)第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づく、該対応する目標植生の属性と考えさせ;6)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づく、該目標植生の属性と考えさせ;そして7)該第1統計値及び第2統計値の比較から侵入速度を決定させる。
【0007】
関心のある対象に対する植生成長を見積もるシステムもまた開示される。該システムは、1)第2検出データセットから目標植生を識別し、;2)第1検出データセット内の対応する目標植生を識別し、該第1検出データセットが該第2検出データセットの前の時間に収集されて、該対応する目標植生を識別し;3)第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づく、該対応する目標植生の属性と考え;4)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づく、該目標植生の属性と考え;そして5)該第1統計値及び第2統計値の比較から侵入速度を決定する、よう構成されたプロセッサを有する。該システムは該プロセッサに接続され、該プロセッサに該第1及び第2検出データセットを提供するよう構成されたデータ入力部を有しる。該システムは更に該プロセッサか又は該データ入力部か何れかに接続されたユーザーインターフエースを有する。
【図面の簡単な説明】
【0008】
【図1】検出データセットの実施例を略図で図解する。
【図2A−2C】関心のある対象に対する植生成長を見積もる方法の1実施例を図解する。
【図3】LiDARデータセットの断面図の実施例を略図で図解する。
【図4】多角形を作ることにより中で目標植生が識別されるLiDARデータセットの実施例を略図で図解する。
【図5】関心のある対象に対する第1及び第2検出データセット内の目標植生の属性と考えられる第1及び第2統計値の実施例を略図で図解する。
【図6A】度日(degree days)の関数として年間植生成長のパーセントをプロットするグラフの1実施例を図解する。
【図6B】度日の関数として年間植生成長のパーセントをプロットするグラフのもう1つ実施例を図解する。
【図7】関心のある対象について侵入マップを表示するグラフィカルユーザーインターフエース(GUI)の1実施例を略図で図解する。
【図8】関心のある対象に対する植生成長を見積もるシステムの実施例を略図で図解する。
【図9】関心のある対象に対する植生成長を見積もるシステムのもう1つの実施例を略図で図解する。
【図10】勧告する軽減の種類を決定するために、目標植生侵入方向が中でテストされるLiDARデータセットの断面図の実施例を略図で図解する。
【0009】
明確化の目的で、そして適当と考えられた場合、対応する特徴を示すために、図中では参照数字が繰り返され、そして該特徴を良く示すために図中では種々の要素が必ずしもスケール合わせして画かれてないことは評価されるであろう。
【実施例1】
【0010】
幾つかの異なる成長速度がここでは言及される。用語“相対成長速度”は目標植生が関心のある対象に向かって成長しつつある速度を呼ぶ。用語“侵入速度(encroachment rates)”は用語“相対成長速度”と互換可能に使われてもよい。用語“相対成長”(“侵入成長”とも呼ばれる)が使われてもよく、それは2つの対象間の関係で最小距離の変化を引き起こす成長である。用語“年間成長速度”は1年当たりの成長を意味する。該年間成長速度は高さ、相対成長、又は何等かの他の成長について決定されてもよい。用語“間隙”は関心のある対象と問題の植生(又は他の対象)の間の最小距離を意味する。
【0011】
図1は植生成長を見積もる方法及びシステムで使われる公知の電力線導体位置22と敷設用地(ROW)境界線24を有する検出データセット20の実施例を略図で図解する。該検出データセット20は好ましくは木の上から空中で集めた3次元データセットであるのがよいが、或る実施例は地上ベース検出データセット収集技術を利用してもよい。この図では、LiDARセンサーからの分類された3次元点クラウドデータセットが、ラスターマップに変型されており、植生高さを画素のグレイスケール値として示している。明るいグレイスケール値ほど高い植生を表しており、黒い値は植生が無いことを表す。この白黒の線画での図解を容易にするために、グレイスケール化された樹木によりカバーされない敷設用地の境界線24の間の空いた範囲は、LiDARデータセット内のこの様な範囲が黒で示されるのが典型的であるが、白として示される。ここで空いた敷設用地の範囲が他の構造体が図解されるように白で示される。なお他の実施例は、空中及び地上ベースの検出データ収集技術の組み合わせを使用してもよい。該検出データセット20は、光検出及び測距(LiDAR)データ(時に“レーザー走査データ”と呼ばれるもの)、レーダーデータ、合成開口レーダーデータ、距離測定用走査及び3次元点クラウド提供に基づく何等かのセンサーからのデータ、を含むが、それらに限定されない様な種々のデータの種類を含んでもよい。該検出データセット20は、デジタル画像形成、ビデオ又はハイパースペクトラル画像形成データの様な他のデータセットによりサポートされてもよい。簡便のため、該検出データセット20はLiDARデータと呼ばれることが多いが、他の形式のデータも請求される発明の範囲内で検出データとして使うために好適であることは理解されるべきである。該検出データセット20はポジショニングデータ、例えば検出データセット内で対象の座標位置が既知となるようなグローバルポジショニングシステム(GPS)データを含んでもよい。加えて、該検出データセット20は既知のユーティリティシステム位置と組み合わされてもよい。図1の実施例では、該電力線位置22と敷設用地境界線24への参照も行われてもよいように既知の電力線導体位置22と敷設用地境界24が該検出データセットと組み合わされた。当業者は、電力線導体の様な、ユーティリティ対象を、それらの寸法と位置についてモデル化され、検出データセット20と組み合わされることを可能にする、多くの商業的に入手可能な製品を熟知している。この様なユーティリティ対象も、例えば沈下する氷の条件下にある時、何処に電力線があるかを示す様に、種々の天候及び負荷条件をシミュレートするためモデル化されてもよい。
【0012】
図2A−2Cは関心のある対象に対する植生成長を見積もる方法の1実施例を図解する。オプションでは、第1検出データセットが集められ26,第2検出データセットが集められる28。前に述べた様に、該第1及び第2検出データセットは好ましくは各々が空中から及び/又は地上から集められた3次元データセットであるのがよい。検出データセットの好適な例は、光検出及び測距(LiDAR)データ(時に“レーザー走査データ”とも呼ばれるもの)、レーダーデータ、合成開口レーダーデータ、距離測定走査及び3次元点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、又はハイパースペクトラル画像形成を含むが、それらに限定されない。或る実施例では、該検出データセットの1つ以上が既に利用可能であってもよく、例えば、もし該1つ以上の検出データセットがどこかに記憶されていれば、集められる必要はない。該検出データセットは、静止画像形成、カラー−赤外線画像形成、熱的画像形成又はハイパースペクトラル画像形成の様な他のデータセットによりサポートされてもよい。この様なサポート用データセットは、例えば、該検出データを真に迫るカラーで、或いは恐らく熱的痕跡、化学的組成、材料組成、他の様な、或る他の検出特性にマップ化するカラーで、カラー化するため使われてもよい。加えて、オプションのサポート用データセットは代わりに、3次元データ点の現実のカラー値を反映するために、3次元点応答の頂上に投影されてもよい。これは画像特徴の容易な識別を可能にする。或る実施例では、該オプションのサポート用データセットは検出データセットから目標樹木に相関を取られたスライスデータを提供する地上ベースのデータであてもよい。従って、該第1及び第2検出データセットの各々はオプションで1つ以上のサポート用データセットを有してもよい。該第2検出データセットは該第1検出データセットの後の時刻に集められたデータに対応する。或る実施例では、第1データセット及び第2データセットが集められた時の間の時間は約1成長シーズンであるが、しかしながら、他の実施例はより短い又はより長い時間を使ってもよい。
【0013】
或る状況では、該第1検出データセット及び/又は第2検出データセットは植生応答(vegetation returns)でない1つ以上のデータ点を有してもよい。ほんの二、三の例として、検出データセットは大地応答、水応答、及び/又は電力線導体応答を有してもよい。従って、或る実施例では、植生応答を識別するために第1及び/又は第2検出データセットを分類することがオプションとして望ましい29。該分類過程に依り、該植生応答のみが次の過程で使われる、又は非植生応答が捨てられる、ように該植生応答が植生応答としてフラグを立てられてもよい。下記本文で該第1検出データセット又は第2検出データセットを参照する時、従って、1)該集められた又は記憶された検出データセットが既に植生応答を有したもののみだった、2)該集められた又は記憶された検出データセットが植生応答だけ使用するためフラグを立てるよう分類された、又は3)該集められた又は記憶された検出データセットが非植生応答を除外するよう分類された、の何れかなので、該植生応答のみが該第1及び第2検出データセット内で使われると仮定される。
【0014】
目標植生は第2検出データセットから識別される30。或る実施例では、該目標植生は、該第2検出データセット内の該目標植生の1つ以上の点を含む第2検出データセットからの植生多角形を識別すること32により識別されてもよい30。多角形形成を通しての樹木植生の識別は当業者には良く理解される。ほんの1例として、1つ以上の多角形は、1)各植生応答の大地レベルから高度を識別する;2)該植生応答上に水平に空間的に基準化されたラスターメッシュを置く;3)該ラスター内で各セル内部で大地から最高、平
均、又は他の統計的高度を読む;4)植生クラス内で有効な応答を有しないラスターセルに、0値を与える;5)最終ラスターが植生高さラスターと呼ばれる;6)該植生高さラスターに、成長抑制−領域拡張法アルゴリズム又はそのより複雑な派生品を適用し、1つ以上の多角形に帰着する、ことにより第2データセットの植生応答から形成されてもよい。
【0015】
該識別された目標植生は、必ずしも多角形である必要のない、植生データコンテナー内に落下するよう考慮されてもよい。該植生データコンテナーは多角形、単一画素又は画素のグループ、格子セル又は分析用に形成される他の形の空間的データ実体であってもよい。分析されるべき植生を含むこれらの空間的実体は目標植生形状と呼ばれてもよい。
【0016】
該対応する目標植生は該第1検出データセットから識別される34。該第2検出データセットから該目標植生を識別するため使われる該植生データコンテナー又は目標植生形状は、該第1検出データセットから該対応する目標植生を識別するために34該第1検出データデータセット上に重ね合わされる。ほんの1例として、もし植生多角形が該第2検出データセットから識別されたなら、該第2検出データセットからの該植生多角形は、該第1検出データセット内の対応する目標植生の1つ以上の点を選択するために使われてもよい36。
【0017】
第1統計値は、関心のある対象に対する第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる38。該関心のある対象は、電力線、鉄道軌道、鉄道頭上導体、電話線、道路、通信ケーブル、高速道路面、そして道路標識視認セクター、の様な、しかしそれらに限定されない、種々の対象であってもよい。関心のある対象はまた、対象の周りの安全緩衝ゾーンを含んでもよい。該第1検出データセット内の1つ以上のデータ点は、例えば、上記ステップ36で植生多角形を使うことにより、識別される様に、該対応する目標植生に属する。或る実施例では、該対応する目標植生の属性と考えられる38第1統計値は、該第1検出データセット内の該対応する目標植生に属すると識別された該1つ以上のデータ点の各々から、該関心のある対象までの距離を計算することにより決定される。該対応する目標植生の属性と考えられる38第1統計値は、次いで該識別された第1検出データセット点の各々から該関心のある対象までの、これらの計算距離に基づいてもよい。例えば、或る実施例では、該対応する目標植生の属性と考えられる38第1統計値は、該識別された第1検出データセット点の各々から該関心のある対象までの計算距離のセットの最小距離であってもよい。他の実施例では、該対応する目標植生の属性と考えられる第1統計値は、該関心のある対象までのN個の最も近いと識別された第1検出データセット点の平均であってもよい。他の実施例では、該第1検出データセットの該対応する目標植生に属するとして識別されて来た該1つ以上のデータ点の各々からの距離を計算するよりも寧ろ、該第1検出データセット内の植生データ点の全部からの距離が最初に計算され、次いで第1検出データセット内の該対応する目標植生に属するとして識別された計算が、該対応する目標植生の属性と考えられる38第1統計値を決定するために使われてもよい。
【0018】
或る実施例では、該第1及び第2データセットの収集の間でセンサーの種類又は収集パラメーターが変化したために、該第1及び第2検出データセットを校正することが望ましい。センサー校正は、同時に両方のセンサー/パラメーターを用いて植生のサンプル片を集め、結果を比較する、ことにより行われてもよい。これは或る実施例では、該2つのセンサータイプでの植生読みの間のマップ化を行うために使われてもよい。
【0019】
第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる40。該第2検出データセット内の1つ以上のデータ点は、例えば上記ステップ32の植生多角形の識別により、識別
される様に該目標植生に属する。或る実施例では、該目標植生の属性と考えられる40第2統計値は、該第2検出データセット内の目標植生に属するとして識別されて来た該1つ以上のデータ点の各々から関心のある対象までの距離を計算することにより決められる。該目標植生の属性と考えられる40第2統計値は次いで、該識別された第2検出データセット点の各々から関心のある対象までのこれら計算距離に基づいてもよい。例えば、或る実施例では、該目標植生の属性と考えられる40第2統計値は該識別された第2検出データセット点の各々から関心のある対象までの計算された距離のセットの最小距離であってもよい。他の実施例では、該目標植生の属性と考えられる該第2統計値は、関心のある対象までの、N個の最も近い識別された第2検出データセット点の平均であってもよい。他の実施例では、該第2検出データセットの目標植生に属するとして識別されて来た該1つ以上のデータ点の各々からの距離を計算するよりも寧ろ、該第2検出データセット内の植生データ点の全部からの距離が最初に計算され、次いで該第2検出データセット内の該目標植生に属するとして識別された計算が、該目標植生の属性と考えられる40第2統計値を決定するために使われてもよい。
【0020】
図2Bの方法を続けると、侵入速度は該第1統計値及び第2統計値の比較から決定されてもよい42。該侵入速度は該目標植生が関心のある対象に向かって成長しつつある速度である。この様であるから、該侵入速度は、他の対象に関連しない従来の樹木成長速度とは非常に異なる。或る実施例で、例えば、第1検出データセット及び第2検出データセットが約1成長シーズン離れて集められた実施例では、該侵入速度は第1統計値及び第2統計値の間の差を取り、その差を約1成長シーズンにより割ることによって該目標植生用に決められる。他の実施例は該成長シーズン中に概略同時には集められない第1及び第2検出データセットを考慮してもよい。植生成長速度は該成長シーズン中に変わり、該変化は或る実施例では、全年間成長の各成長シーズン日の相対部分を予測するために、成長シーズン中の高さ成長モデルを使うことにより斟酌されてもよい。
【0021】
度日カーブ(Degree day curves)は特定の地域又は天候ゾーン内で、特定樹種又は木のタイプについて成長シーズン全体の間の成長(高さ)パーセンテージを度日数の関数としてプロットする。1成長シーズン中達成される度日数はシーズンからシーズンまでで、そして地理学的位置に依り変わる。問題の成長シーズン用に特定時間向けカーブが利用可能でないならば、ローカルの年毎の平均したカーブが使われるべきである。該カーブは特定種向けであってもよく、全ての種用又はハードウッド(hardwoods)の様な種グループ用に均一であってもよく、一層特定的なカーブは一層精密な測定値を与える。度日カーブの例は計算例に関連して後で図解される。もう1つの例として、或る実施例は、下式を使うことにより該第1統計値及び第2統計値の比較から侵入速度Gaを決定し42、該式は該第2統計値と該第1統計値の間の差を取り、その差を下記で表現される量で割り算しており、
【数1】
ここで
Gaは目標植生の年間侵入速度を有し、
D2は該目標植生の属性と考えられる第2統計値を有し
D1は該目標植生の属性と考えられる第1統計値を有し
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nは第1検出データセットと第2検出データセットの収集間の完全成長シーズン数を有する。ここの式で使われる時、“完全成長シーズン”は、春から秋までの全体として該LiDARデータセット間に起こった成長シーズンである。部分的成長シーズンは該LiDAR収集によりカットされた成長シーズンである。
【0022】
或る実施例では、該侵入速度は、第1及び第2検出データセットから決定される該侵入速度を有効化し、調整するよう求める現地測定成長データに基づき校正されてもよい。
【0023】
次いで関心のある対象に対する将来植生成長は、将来の期間に亘り該侵入速度を適用することにより見積もられてもよい44。例えば、或る実施例では、関心のある対象に対する将来成長は、将来時の目標植生と関心のある対象の間の間隙距離を決定するため使われてもよい。この様に見積もられる又は予測される間隙は下記で表され、
DT=D2+Ga*(100%−P2+100%*m+PT) (2)
ここで
DTは将来時の目標植生と関心のある対象の間の間隙距離を有し、
D2は第2統計値を有し、
Gaは侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは第2検出データセットの収集と将来時の間の完全成長シーズン数を有する。ここでこの式で使われる時、“完全成長シーズン数”は春から秋までの全体としてLiDARデータセット間で起こった成長シーズンである。部分的成長シーズンは該LiDAR収集によりカットされた成長シーズンであり、そして
PTは将来時に過ぎた成長シーズン度日のパーセンテージを有する。
【0024】
1つ以上の追加の目標木用に該処理を繰り返すか否かの決定46が行われる。もし該処理が1つ以上の追加の目標木用に繰り返されるなら48、ステップ32及び36での追加目標植生の識別でスタートする該過程が繰り返される。代わりに、該過程は1つ以上の追加目標木用に繰り返される必要がない50。なお他の実施例では、アクション38−42及びオプションの44がバッチ処理として進められてもよい。例えば、多数の目標植生の場合は第2検出データセットから1ステップで識別されてもよい。次いで対応する目標植生の多数の対応する場合が該第1検出データセットから識別される。目標植生及び対応する目標植生の対の1つの場合の属性として第1及び第2統計値を考える代わりに、多数の対が、第1及び第2統計値の多数の対を得るバッチの部分として処理されてもよい。かくして、この様なバッチ実施例では、侵入速度は、バッチ取扱いなのでその過程を繰り返す必要無しに、識別された多数の目標植生の各々用に決定される。
【0025】
実施例に依っては、或るオプション的アクションが上記説明の方法で含まれてもよい。オプションでは、該関心のある対象に対する将来植生成長が、該目標植生及び該1つ以上の追加の目標植生を含む該第2検出データセットの少なくとも1部分と連携して、該目標植生及び該1つ以上の追加の目標植生用に、表示されてもよい52。この様な表示の実施例は図7と関連して論じられる。1使用例として、将来の期間(例えば、次の5年)用に、各木について導体までの最小安全距離を保持するために必要なカット量を見出すよう該決定情報及び/又は表示情報が使われる。大規模には、トリミング作業で、余りに詳細なデータの使用は非生産的になるので、現地仕事の仕様を規定するのに、距離は木ベースでなく、範囲ベースで使用されてもよい。
【0026】
図2Cの方法を続けると、もし該関心のある対象に対する目標植生の将来の植生成長が、将来時に、該関心のある対象と交差する目標植生に帰着するだろうと見積もられるならば54、
・ユーザーに該将来時の関心のある対象との見積もられる将来交差を知らせる、
・該目標植生と該関心のある対象との間の見積もられる将来の相互作用を説明する相互作用表記録を植生データベースに属させる、
・マップ上の目標植生に、該関心のある対象との見積もられる将来交差の故にサービスを要するとフラグを立てる、
・該目標植生を軽減させる作業注文を発生する、様なアクションが取られてもよい。{ここで用いられる時、軽減(mitigation)は全植生除去、刈り取り(小さな植生の除去)、枝打ち、枝全体の除去、トリミング、枝の望ましい形へのカット、化学的処理(例えば、植生を殺すための除草剤の使用、かくしてその更に成長するのを止める)、或いは樹皮剥ぎ取り(長期進行で木の死へ導く)を呼ぶ}。
【0027】
ここで使われる時、“関心のある対象”は該関心のある対象の周りの緩衝ゾーン或いは安全ゾーンも含むことは注意すべきである。
【0028】
例示実施例
具体的方法を実行するために、第1及び第2検出データセットが集められる。この例では、該検出データセットは異なる時期に、例えば、概略1成長シーズン離して、集められたLiDARデータセットであってもよい。簡単のために、この例の第1検出データセットはLiDAR1と呼ばれ、第2検出データセットはLiDAR2と呼ばれる。該LiDAR1とLiDAR2は植生、土地及び他の応答を相互に分けるよう分類されてもよい。図3の断面LiDARデータ図で略図的に図解される様な、この種の分類を行う商業的なソフトウエア製品が存在する。導体56からのLiDAR応答は大地58及び植生60からとは異なるよう分類されてもよい。ここで使われる時、用語“植生”は木、やぶ、かん木及び植物を含むがそれらに限定されないことは注目すべきである。
【0029】
図4はLiDAR2検出データセットの実施例を略図的に図解し、該データセット内では、目標植生は、例えば、分析単位として働く植生多角形62及び64の様な、植生多角形を作ることにより識別される。この実施例では、各植生多角形は植生イベント(LiDAR植生応答)を有し、該イベントは植生多角形に付随する目標植生の部分として分析されるべきである。該植生多角形形成時、大地応答66及び導体応答68の様な、該LiDARデータ内の非植生応答型(もしあれば)は無視されてもよい。上記説明の様に、例えば、該多角形はラスター化されたLiDAR植生高さモデルから作られてもよい。植生高さモデルはLiDARからの最高植生応答と、同じLiDARデータから決められた大地レベルとの間の高度差を示すラスターである。この様な実施例では、分析されるべきラスター範囲は正方形画素に分けられ、該画素の各々は画素内の植生高さを表すグレイスケール値を与えられる。画素内の植生高さを予測するために、最高高さのみならず、該植生高さの百分率も使われてもよい。普通の実施例では、LiDAR応答の最大高さが使われる。多角形を自動的に形成する公知の技術の或る例は、成長抑制領域拡張法(growth−constrained seeded region growing method)及び抑制谷追跡アルゴリズム(constrained valley−following algorithm)を含むがそれらに限定されない。多角形化用の他の技術は当業者には公知である。
【0030】
この例では、植生成長は導体68(この例の関心のある対象)に対して見積もられる。関心のある対象(この例の)を表すためにLiDAR導体データ68が使われてもよく、或いは該LiDAR導体データはオプションで分析されるべき導体の3次元(3D)モデルを作るため使われてもよい。関心のある対象のこの様なモデルを作る商業的ソフトウエア製品が存在し、当業者には公知である。該最終モデルは例えば、3次元ベクトル−モデルであってもよい。現地測量の様な他のデータ源から作られる、現存の3次元モデルも同様に使われてもよい。例えば、種々の沈下/揺れシナリオでのその起こり得る位置をシミュレートするために、関心のある対象(この場合では、導体)のシナリオ分析が行われてもよい。シナリオ分析は作業する方法用には必要ではないが、関心のある対象に対し見積もられる植生成長の精度を改善するかも知れない。沈下/揺れシナリオは時には“天候の状態”と呼ばれ、この様な沈下/揺れシナリオは商業的ソフトウエアパッケージでモデル化されてもよい。
【0031】
本例でこの点まで、目標植生は、1つ以上の植生多角形を識別する多角形化法を使って、第2検出データセット(LiDAR2)から識別されて来た。対応する目標植生は、該第1検出データセット内の1つ以上の対応する目標植生の対応する点を選択するために、例えば、第2検出データセットからの該1つ以上の植生多角形を使うことにより、該第1検出データセットから識別されてもよい。或る実施例では、該1つ以上の植生多角形内の植生応答用の距離計算を行うことのみにより、該検出データセット上で行われる必要のある距離計算数を減じるために、該1つ以上の植生多角形が使われてもよく、この実施例では、該距離計算は該関心のある対象への全植生応答について行われる。次いで、該1つ以上の植生多角形は、どの距離計算が、統計値を該目標植生の属性と考える目的で、該目標植生に属するかを選択するため使用される。図5は、第1及び第2統計値を、関心のある対象に対するLiDAR1及びLiDAR2検出データセット内の目標植生の属性と考える過程を略図で図解する。図5で関心のある対象は最も低い導体70である。説明を容易にするために、該LiDAR1データセットと該LiDAR2データセットはこの図で重なり合っている。該LiDAR1データセット植生は大きいデータ点として示され、LiDAR2データセット植生は小さなデータ点として示される。この図で植生多角形72が図解されている。該LiDAR2データセットはLiDAR1データセットより遅い時点で取り上げられ、該LiDAR2データがLiDAR1データセットより更に外へ延びるので、該データは該目標植生76の介入する成長を反映する。
【0032】
対象までの距離で帰属させられた、LiDAR1からのデータセット点(大きなLiDARデータ点)は、植生多角形内で、第1統計値を目標植生76の属性と考えるよう分析される。この例で、該第1統計値は該LiDAR1目標植生76から関心のある対象70までの最短距離(矢印78で図解)である。その多角形内のLiDAR2(小さなLiDARデータ点)からのデータセット点は同様の仕方で第2統計値を目標植生76の属性と考えるよう分析される。この例で、該第2統計値は該LiDAR2目標植生76から関心のある対象70までの最短距離(矢印80により図解)である。成長により、LiDAR1及びLiDAR2内の目標植生の同じ枝は関心のある対象70までの最短距離を提供する枝であったり、又はなかったりすることを注目すべきである。
【0033】
侵入速度は該第1統計値及び第2統計値の比較から決められる。この例のために、LiDAR1及びLiDAR2のデータセットが連続する年に、各年の成長シーズンの中程近くで、集められたと仮定しよう。図6Aの例示する度日カーブ内で図解される様に、LiDAR1はその成長シーズン中40度日が過ぎた時集められた。図6Bの例示度日カーブで図解される様に、LiDAR2はその成長シーズン中55度日が過ぎた時集められた。図6A及び6Bは、特定気候ゾーンで分析される特定種類の植生について度日(dd)の関数としての年間成長パーセンテージの略図式の典型的カーブを示す。この様なカーブは局地的生物学的条件に適合され、より局地的カーブ程より精密な測定値を生じる。この方法では、もし侵入成長カーブが利用出来ないなら、侵入の成長を見積もる説明過程で高さ成長カーブが使われてもよい。当業者による選択用に多くの種々の高さ成長カーブが利用可能である。使われるべきカーブは、典型的年間合計熱量、年間降雨量、土壌生産性及びその地域内の優占種、に基づき選択される。該カーブは局地化される必要はないが、もし出来るだけ最良の精度が望ましいなら、局地的条件に適合されてもよい。既述の様に、この例では、該LiDAR1データセットはその成長シーズンで40ddが既に過ぎた時集められた。図6Aで該カーブを読むと、これは年間成長の80%に対応する。従って、その年の年間成長の残り20%は該LiDAR1が集められた後に起こると仮定されてもよい。また、述べた様に、この例では、LiDAR2のデータセットはその成長シーズンで既に55ddが過ぎた時に集められた。図6Bのカーブを読むと、これは年間成長の約88%に対応する。従って、その年の年間成長の残り12%は該LiDAR2が集められた後に起こると仮定される。LiDAR1データセット用の第1統計値(この例では、導体までの第1の最小距離)は約2.90m(9.5フィート)であると決定された。LiDAR2データセット用の第2統計値(この例では、導体までの第2最小距離)は約1.95m(6.4フィート)であると決定された。
【0034】
従って、該侵入速度は、例えば、前に論じた式(1)を使うことにより、該第1及び第2統計値の比較から決定される:
【数2】
【0035】
第2統計値D2=約1.95m(6.4フィート)であり、第1統計D1=約2.90m(9.5フィート)であり、LiDAR1が集められた時過ぎた成長シーズン度日のパーセンテージP1=80%であり、LiDAR2が集められた時過ぎた成長シーズン度日のパーセンテージP2=88%であり、そしてLiDAR1とLiDAR2の収集の間の完全成長シーズン数n=0であるので、我々は年間侵入速度Gaは下記の様に決定出来る:
Ga=(約6.4*0.3048−9.5*0.3048)m/{(100%−80%)+100%*0+88%}
Ga=(−3.1*0.3048m)/108%=−2.87*0.3048m/成長年=−0.875m/成長年
【0036】
最後に、我々は関心のある対象、この場合は導体、に対する将来植生成長を見積もることが出来る。例えば、もし我々が1完全成長シーズンと30度日(dd)後に如何に該目標植生が該導体に近いかを知ろうと欲するなら、我々は上記で論じた式(2)を使うことが出来る:
DT=D2+Ga*(100%−P2+100%*m+PT) (2)
【0037】
第2統計値D2=約1.95m(6.4フィート)であり、年間侵入速度Ga=約−0.875m(2.87フィート)/成長年であり、LiDAR2が集められた時過ぎた成長シーズン度日のパーセンテージP2=88%であり、LiDAR2の収集と将来時の間の完全成長シーズン数m=1であり、そして将来時に過ぎる成長シーズン度日のパーセンテージPT=72%(図6Bの成長カーブを見ると、30度日は年間成長の72%に対応すると見られる)なので、我々は将来時の目標植生と導体の間の距離DTを下記の様に見積もることが出来る:
DT=6.4*0.3048m+(−2.87*0.3048m)*(100%−88%+100%*1+72%)=3.13*0.3048m=0.954m
【0038】
関心のある対象に対する植生成長を見積もる方法の実施例は多数目標植生に適用されてもよい。植生成長見積の結果は種々の方法で、例えばグラフィカルユーザーインターフエース(GUI)を介して、ユーザーに表示される。図7は、関心のある対象(この場合、電力線84)についての侵入マップを表示するGUI82の実施例を略図で図解する。陰影付きの多角形は分析される種々の目標植生を示す。見積もられる侵入は、各植生の属性と考えられる第1及び第2統計値と、線導体に関する侵入速度と、により、植生間で変わる。GUI82上の負値は侵入する植生を意味する。選択された多角形の更に進んだ詳細を示すために該GUI82内に副ウインドウ86が提供される。
【0039】
図8は関心のある対象に対する植生成長を見積もるシステム88の実施例を略図で図解する。該システム88はプロセッサ90を有し、該プロセッサは1)第1検出データセットから目標植生を識別し、2)第2検出データセット内の該目標植生を識別し、該第2検出データセットは該第1検出データセットより後れた時刻に収集されて、該第2検出データセット内で識別し、3)第1統計値を、該関心のある対象に対する該第1検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え、4)第2統計値を、該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え、5)該第1及び第2統計値の比較から侵入速度を決定し、そして6)該侵入速度を将来の期間に亘り適用することにより該関心のある対象に対する将来の植生成長を見積もる、ように構成される。これらのアクションを達成する適当なアクションの実施例が上記で開示された。該プロセッサ90は、CD、磁気テープ、光学的ドライブ、DVD、ハードドライブ、フラッシュドライブ、メモリーカード、メモリーチップ、又は何等かの他のコンピュータが読み出し可能な記憶媒体、の様な、しかしそれらに限定されない、コンピュータが読み出し可能な記憶媒体92上に記憶された機械読み出し可能なインストラクションを実行するコンピュータであってもよい。該プロセッサ90は、代わりに、又は加えて、ラップトップ又はデスクトップコンピュータ、マイクロプロセッサ、特定用途向け集積回路(ASIC)、デジタル部品、アナログ部品又はそれらの何等かの組み合わせ及び/又は複数品を有してもよい。該プロセッサ90はスタンドアロンのユニットであってもよく、或いはデバイスの分散型セットであってもよい。
【0040】
データ入力部94はプロセッサ90に接続され、該プロセッサ90に少なくとも第1検出データセット及び第2検出データセットを提供するよう構成される。検出データ取り込みデバイス96はオプションで第1及び第2検出データセットのライブの取り込みを可能にするために該データ入力部94に接続される。検出データ取り込みデバイスの例は、全波、多数応答又は最初と最後のパルス記録式LiDARセンサーを含むがそれらに限定されない。同様に、データベース98はオプションで、1つ以上の前に取り込まれた第1及び/又は第2検出データセットを該プロセッサ90に提供するために該データ入力部94に接続されてもよい。データベース98は生データ又はフォーマットされたフアイルを保持するメモリーデバイス程簡単であってもよく、或いはデータベース98は複雑なリレーショナルデータベースであってもよい。実施例に依って、該データ入力部94に接続されるのは、1つ又は多数のデータベース98及び/又は検出データ取り込みデバイス96であるか、又は検出データ取り込みデバイス96のみであってもよい。該検出データ取り込みデバイス96が該データ入力部94に接続されるのは、有線接続、光接続、又は無線接続による。無線接続の適当な例は、802.11xプロトコル又はBluetooth(登録商標)プロトコルを使う無線周波接続を含むが、それに限定されない。更に、データベース98を有する実施例では、プロセッサ90は結果を記憶するため、又は該データ入力部94をバイパスすることによりデータにアクセスするため、データベース98に接続されてもよい。
【0041】
システム88はまた、プロセッサ90及び/又はデータ入力部94の何れかに接続されてもよいユーザーインターフエース100を有する。1例として、該ユーザーインターフエース100は、第1及び/又は第2検出データセット、関心のある対象、該関心のある対象に対するそれぞれ第1及び第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、目標植生の属性と考えられる第1及び/又は第2統計値、そして該関心のある対象に対する見積もられた将来植生成長、を表示するよう構成されてもよい。該ユーザーインターフエース100はまた、ユーザーが、該データ入力部94に接続されたデータベース98から第1及び/又は第2検出データセットを選択する、又は該データ入力部94に接続された検出データ取り込みデバイス96からのデータの収集をスタートし、停止する、ことを可能にするよう構成されてもよい。
【0042】
図9は関心のある対象に対する植生成長を見積もるシステム102のもう1つの実施例を略図で図解する。この実施例で、プロセッサ90はネットワーク104上でデータ入力部94と接続される遠隔プロセッサであるようセットアップされる。該ネットワーク104は有線又は無線のローカルエリヤネットワーク(LAN又はWLAN)であってもよく、或いはネットワーク104はデータを受けたり、送ったりするために何等かの数の通信プロトコルを使う有線又は無線のワイドエリヤネットワーク(WAN又はWWAN)であってもよい。該プロセッサ90が遠隔に配置されるシステム102を有することは、多数クライアント側データ入力部94が該プロセッサ90のリソースを共有することを可能にする。第1及び第2検出データセットは、データベース98から及び/又は該データ入力部94に接続されたユーザーインターフエース100の制御下の検出データ取り込みデバイス96から、データ入力部94により得られてもよい。該第1及び第2検出データセットは次いで該ネットワーク104上を該プロセッサ90へ転送され、該プロセッサは次いで、1)第1検出データセットから目標植生を識別し、2)該第2検出データセット内の該目標植生を識別し、該第2検出データセットが該第1検出データセットより後れた時刻に収集され、該目標植生を識別し、3)第1統計値を、関心のある対象に対する、該第1検出データセット内の該目標植生の1つ以上の点の距離に基づき該目標植生の属性と考え、4)第2統計値を、該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき該目標植生の属性と考え、5)該第1統計値及び第2統計値の比較から侵入速度を決定し、6)該侵入速度を将来の期間に亘り適用することにより該関心のある対象に対する将来植生成長を見積もり、そして7)該関心のある対象に対する該見積もられた将来植生成長を有するデータ信号106をクライアント側へ送信してもよい。この様なデータ伝送は有線ケーブル、光ケーブル、及び空中の様な種々の伝送媒体上で起こってもよい。この実施例では、該遠隔のプロセッサ90は、クライアント側のハードウエアのコストを下げるのを助けるため使われてもよく、そして中央にアップグレードされた点があるので、プロセッサへの、又は該プロセッサにより行われつつあるインストラクションへの、何等かのアップグレードを容易にする。
【0043】
上記説明の様に、図2Cに関連して、関心のある対象に対する目標植生の将来植生成長が、将来時に関心のある対象と交差する目標植生に帰着することが見積もられるならば、該目標植生を軽減させる作業注文が発生されてもよい。作業注文の1部として、或る実施例はまた、例えば、刈り取り、カット、トリミング又は植生除去を含むが、それらに限定されない軽減の種類を勧告してもよい。図10は、中で、勧告される軽減の種類を決定するため、目標植生侵入方向がテストされLiDARデータセットの断面図の実施例を略図で図解する。侵入方向ベクトルの例108,110はそれぞれ植生点112及び114から突出するよう示され、最も近い電力線導体点116を指している。1実施例では、各多角形内の植生応答は、該植生の導体までの距離に基づき再び分類される。侵入成長と望まれる間隙の年数とに基づき、トリムされる必要のある点が、それら自身のクラスに分けられる。それらの点の重力中心が除去の中心として考慮される。除去中心から最も近い導体点までの方向ベクトルが画かれる。このベクトルは該植生が該導体へ近付く角度を規定す
る。代わりに、方向ベクトルは植生の最近点と対応するラインの間で、この順序で画かれてもよい。α及びβは、対応するベクトルが水平線と交差する時形成されるベクトル角を表す。局部的しきい値角度と呼ばれる角度Φは局部的しきい値ベクトル117と水平線の間に形成される角度を表す。該局部的しきい値ベクトル117はサイドトリムエッジ点(P)と関心のある対象とを通過する(この例では、最も近い導体点116)。Pは最小サイドトリム高さ120の高度で、分析される植生点と最も近い導体点を通る垂直面内の、敷設用地エッジ118の点である。最小サイドトリム高さは、ローカルのトリム職人が、彼等の工具と樹木刈り取り能力に基づき、規定するパラメーターである。該最小サイドトリム高さは刈り取り熟練で除去することが現実的でない植生高さに設定されるべきである。軽減の種類を決めるために、α及びβは局部的しきい値角度Фと個別に比較される。もしαが該しきい値角度Фより大きく決定されるなら、αに付随する植生点112はアンダーカット植生として考えられ、軽減するために刈り取り又はカットを要する。もしαがしきい値角度Фより小さいと決定されるなら、αに付随する植生点112はサイド侵入として考えられ、サイドトリム又は樹木除去を要する。同じ方法がβをテストするため使われる。この断面図で見られる様に、αはФより大きく、植生点112に付随する植生の軽減用に刈り取り又はカットが必要であることを示している。βはФより小さく見られ、植生点114に付随する植生の軽減用にサイドトリム又は樹木除去が必要とされることを示している。
【0044】
かくして、関心のある対象に対する植生成長を見積もる方法とシステムの幾つかの実施例を説明したが、前記詳細な開示は例としてのみ提示されるよう意図されており、限定するためでないことは当業者に明らかである。明示的にここで述べられてないが、当業者に、種々の変更、改善及び変型が起こり、意図されるであろう。これらの変更、改善及び変型がここで示唆されるよう意図されても、それらは請求される発明の精神と範囲の中にある。例えば、具体化された方法とそれらの等価物を実行後、多数のLiDARデータセットは、例えば毎年1つ集められる。異なるデータセット間の相対成長速度の最終決定から、我々は相対成長速度の変動を、降雨と受けた合計熱の様な種々の予測変数の関数として分析してもよく、該関数はより良い予測能力を生ずる。
【0045】
加えて、処理要素の詳述した順序又はシーケンス、又は更に数、文字又は他の呼称の使用は、請求項で指定されているものを除けば、請求される過程を何等かの順序に限定するよう意図されてない。
【0046】
従って、請求される発明は下記請求項とそれらの等価物に依ってのみ限定される。
【特許請求の範囲】
【請求項1】
関心のある対象に対する植生成長を見積もる方法であって、
第2検出データセットから目標植生を識別する過程(30)と、
第1検出データセット内の対応する目標植生を識別する過程であり、該第1検出データセットが該第2検出データセットの前の時間に集められて、該対応する目標植生を識別する過程(34)と、
第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考える過程(38)と、
第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考える過程(40)と、そして
該第1統計値と該第2統計値の比較から侵入速度を決める過程(42)と、を具備する該方法。
【請求項2】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項1に記載の方法。
【請求項3】
該第1及び第2検出データセットの各々が、光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データから成るグループから選択されるデータを有する請求項1に記載の方法。
【請求項4】
該第1検出データセットを集める過程(26)と、そして
該第2検出データセットを集める過程(28)と、を更に具備する請求項1に記載の方法。
【請求項5】
該第1検出データセットを集める過程(26)が、該第1検出データセットを空中から集める過程を更に備えており、そして
該第2検出データセットを集める過程(28)が、該第2検出データセットを空中から集める過程を更に備える請求項4に記載の方法。
【請求項6】
植生応答を識別するために、該第1検出データセット及び/又は第2検出データセットを分類する過程(29)を更に具備する請求項1に記載の方法。
【請求項7】
該第2検出データセットから該目標植生を識別する過程(30)が、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別する過程(32)を備えており、そして
該第1検出データセット内の該対応する目標植生を識別する過程(34)が、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために、該第2検出データセットからの該植生多角形を使う過程(36)を備える請求項1に記載の方法。
【請求項8】
該第2検出データセットから該目標植生を識別する過程(30)が、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別する過程(32)を備えており、そして
該第1検出データセット内の該対応する目標植生を識別する過程(34)が、該第1検出データセットから、該第1検出データセット内の該対応する目標植生の前記1つ以上の点を有するもう1つの植生多角形を識別する過程を備える請求項1に記載の方法。
【請求項9】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択された最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項1に記載の方法。
【請求項10】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の該距離に基づき該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定される該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項1に記載の方法。
【請求項11】
該第1検出データセットが該第2検出データセットの前の前記時間に集められ、前記時間が、該第2検出データセットが集められる時の前に約1成長シーズンを有する請求項1に記載の方法。
【請求項12】
該第1統計値及び該第2統計値の該比較から該侵入速度を決定する過程(42)が該第1統計値及び該第2統計値の間の差を取る過程と、その差を該約1成長シーズンにより割る過程と、を有する請求項11に記載の方法。
【請求項13】
該第1統計値及び該第2統計値の該比較から該侵入速度を決定する過程(42)が、
該第2統計値及び該第1統計値の間の差を取る過程と、そしてその差を下式で表される量で割る過程とを有しており、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nが該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する請求項1に記載の方法。
【請求項14】
将来の期間に亘り該侵入速度を適用する過程により該関心のある対象に対する将来の植生成長を見積もる過程(44)であって、
将来時に該目標植生と該関心のある対象の間の間隙距離を決定する過程であり、該間隙が下式で表され、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mが該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そし
て
PTが該将来時に過ぎた成長シーズン度日のパーセンテージを有する、該決定する過程に依って、前記過程(44)を更に具備する請求項1に記載の方法。
【請求項15】
該関心のある対象が、
電力線(22)、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項1に記載の方法。
【請求項16】
1つ以上の追加の目標植生用に該過程を繰り返す過程(46)を更に具備する請求項1に記載の方法。
【請求項17】
将来の期間に亘り該侵入速度を適用する過程により該関心のある対象に対する将来の植生成長を見積もる過程(44)を更に具備する請求項15に記載の方法。
【請求項18】
該目標植生と該1つ以上の追加の目標植生を有する該第2検出データセットの少なくとも1部分と連携して、該目標植生と該1つ以上の追加の目標植生用に、該関心のある対象に対する該将来植生成長を表示する過程(52)を更に具備する請求項17に記載の方法。
【請求項19】
将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来植生成長を見積もる過程(44)を更に具備する請求項1に記載の方法。
【請求項20】
もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標植生に帰着することが見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標植生と該関心のある対象の間の見積もられる将来相互作用を説明する交互作用表記録を植生データベースに属させる過程、
マップ上の該目標植生に該関心のある対象との見積もられた将来交差のためサービスを要するとしてフラグを立てる過程、そして
該目標植生を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行う過程を更に具備する請求項19に記載の方法。
【請求項21】
軽減の種類を勧告するため目標植生侵入方向をテストする過程を更に具備する請求項1に記載の方法。
【請求項22】
軽減の種類を勧告するために該目標植生侵入方向をテストする過程が、
侵入方向成長ベクトルを決定する過程(110)、
該侵入方向成長ベクトル用のベクトル角βを決定する過程、
局所的しきい値ベクトルを決定する過程(117)、
該局所的しきい値ベクトル用の局所的しきい値角Фを決定する過程、を備えており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生は軽減するために刈り取る又はカットする必要があることを勧告する過程、そして
もし該ベクトル角が該局所的しきい角より小さいことが決定されれば、該目標植生は軽減するためにサイドトリム又は樹木除去をする必要があることを勧告する過程、を備える請求項21に記載の方法。
【請求項23】
関心のある対象に対する植生成長を見積もるためのインストラクションを記憶したコンピュータ読み出し可能な記憶媒体(92)であって、プロセッサにより実行される時、該プロセッサ(90)に
第1検出データセットを提供させ、
第2検出データセットを提供させ、
該第2検出データセットから目標植生を識別させ(30)、
該第1検出データセット内の対応する目標植生を識別させ(34)、該第1検出データセットは該第2検出データセットの前の時刻に集められる条件で、該目標植生を識別させ、
第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えさせ(38)、
第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えさせ(40)、そして
該第1統計値及び第2統計値の比較から侵入速度を決定させる(42)、該インストラクションを記憶したコンピュータ読み出し可能な記憶媒体(92)。
【請求項24】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項25】
該第1及び第2検出データセットの各々が、光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データ、から成るグループから選択されるデータを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項26】
植生応答を識別するために、該第1検出データセット及び/又は第2検出データセットを分類するインストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項27】
該プロセッサにより実行される時、該プロセッサに該第2検出データセットから該目標植生を識別させる該インストラクションが、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別するインストラクションを更に有しており、そして
該プロセッサにより実行される時、該プロセッサに該第1検出データセット内の該対応する目標植生を識別させる該インストラクションが、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使って識別するインストラクションを更に有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項28】
該プロセッサにより実行される時、該プロセッサに該第2検出データセットから該目標植生を識別させる該インストラクションが、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別するインストラクションを更に有しており、そして
該プロセッサにより実行される時、該プロセッサに該第1検出データセット内の該対応する目標植生を識別させる該インストラクションが、該第1検出データセットから、該第1検出データセット内の該対応する目標植生の前記1つ以上の点を有するもう1つの植生多角形を識別するインストラクションを更に有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項29】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択される最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項30】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の該距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定される該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項31】
該第1検出データセットが該第2検出データセットの前の時間から存在し、前記時間は約1成長シーズンを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項32】
該プロセッサにより実行される時、該プロセッサに該第1統計値と該第2統計値の比較から侵入速度を決定させる該インストラクションが、該第2統計値と該第1統計値の間の差を取り、その差を該約1成長シーズンにより割るインストラクションを更に有する請求項31に記載のコンピュータ読み出し可能な記憶媒体。
【請求項33】
該プロセッサにより実行される時、該プロセッサに該第1及び該第2統計値の比較から該侵入速度を決定させる該インストラクションが、
該第2統計値及び該第1統計値の間の差を取る過程と、そしてその差を下式で表される量で割るインストラクションを更に有しており、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nが該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項34】
該プロセッサにより実行される時、該プロセッサに将来の期間に亘り該侵入速度を適用することにより、該関心のある対象に対する将来の植生成長を見積もらせる該インストラクションが、
将来時の該目標植生と該関心のある対象の間の間隙距離を決定するインストラクションを更に有しており、該間隙距離が下式で表され、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
PTが該将来時に過ぎた成長シーズン度日のパーセンテージを有する、請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項35】
該関心のある対象が、
電力線、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項36】
1つ以上の追加の目標木用に、識別し、帰属させそして決定するインストラクションを繰り返すインストラクション(46)を更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項37】
該プロセッサにより実行された時、該プロセッサに、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もらせる(44)インストラクションを更に具備する請求項36に記載のコンピュータ読み出し可能な記憶媒体。
【請求項38】
該目標木と該1つ以上の追加目標木を有する該第2検出データセットの少なくとも1部分と連携して、該目標木と該1つ以上の追加目標木について該関心のある対象に対する該将来の植生成長を表示する(52)インストラクションを更に具備する請求項37に記載のコンピュータ読み出し可能な記憶媒体。
【請求項39】
該プロセッサにより実行された時、該プロセッサに、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もらせる(44)インストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項40】
もし該関心のある対象に対する該目標植生の該将来の植生成長が、該将来時の該関心のある対象と交差する該目標植生に帰着することが見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標木と該関心のある対象の間の見積もられる将来交互作用を説明する交互作用表記録を木データベースに属させる過程、
マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
該目標木を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行うインストラクションを更に具備する請求項39に記載のコンピュータ読み出し可能な記憶媒体。
【請求項41】
該プロセッサにより実行された時、該プロセッサに、
軽減の種類を勧告するため目標植生侵入方向をテストさせるインストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項42】
軽減の種類を勧告するために該目標植生侵入方向をテストするインストラクションが
侵入方向成長ベクトルを決定する(110)、
該侵入方向成長ベクトル用のベクトル角βを決定する、
局所的しきい値ベクトルを決定する(117)、
該局所的しきい値ベクトル用局所的しきい値角Фを決定する、インストラクションを有しており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生が、軽減用に、刈り取り又はカット又はもう1つの下木軽減実務を要することを勧告する、そして
もし該ベクトル角が該局所的しきい値角より小さいことが決定されれば、該目標植生が軽減用にサイドトリム又は樹木除去又はもう1つのサイド成長軽減実務を要することを勧告する、インストラクションを有する請求項41に記載のコンピュータ読み出し可能な記憶媒体。
【請求項43】
関心のある対象に対し植生成長を見積もるシステム(88)であって、
a)プロセッサ(90)であり
1)第2検出データセットから目標植生を識別し(30)、
2)第1検出データセット内の対応する目標植生を識別し(34)、該第1検出データセットは該第2検出データセットの前の時間に集められて、該対応する目標植生を識別し、
3)第1統計値を、該関心のある対象に対し該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考え(38)、
4)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え(40)、そして
5)該第1統計値と該第2統計値の比較から侵入速度を決定する(42)、よう構成された該プロセッサと(90)、
b)該プロセッサに接続され、該プロセッサに該第1及び第2検出データセットを提供するよう構成されたデータ入力部と(94)、
c)該プロセッサか又は該データ入力部の何れかに接続されたユーザーインターフエースと(106)、を具備する該システム。
【請求項44】
該プロセッサ(90)に接続されたデータベース(98)を更に具備する請求項43に記載のシステム。
【請求項45】
該データ入力部(94)に接続された該データベース(98)を更に具備する請求項43に記載のシステム。
【請求項46】
該データ入力部(94)に接続された検出データ取り込みデバイス(96)を更に具備する請求項43に記載のシステム。
【請求項47】
該検出データ取り込みデバイス(96)が、光検出及び測距(LiDAR)システム、レーザー走査システム、レーダーシステム、合成開口レーダーシステム、距離測定走査及び3次元点クラウド提供に基づくセンサーを使うシステム、デジタル画像形成システム、及びハイパースペクトラル画像形成システムから成るグループから選択される請求項46に記載のシステム。
【請求項48】
該検出データ取り込みデバイス(96)が無線接続により該データ入力部(94)に接続される請求項46に記載のシステム。
【請求項49】
該プロセッサ(90)及び該データ入力部(94)がネットワーク(104)を経由して一緒に接続される請求項43に記載のシステム。
【請求項50】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項43に記載のシステム。
【請求項51】
該第1及び第2検出データセットの各々が光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データから成るグループから選択されるデータを有する請求項43に記載のシステム。
【請求項52】
該プロセッサ(90)が植生応答を識別するために該第1検出データセット及び第2検出データセットを分類する(29)よう更に構成される請求項43に記載のシステム。
【請求項53】
該第2検出データセットから該目標植生を識別する(30)プロセッサ構成が、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を、該第2検出データセットから識別する(32)インストラクションを有しており、そして
該第1検出データセット内の該対応する目標植生を識別する(34)プロセッサ構成が、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使う(36)インストラクションを有する請求項43に記載のシステム。
【請求項54】
該第2検出データセットから該目標植生を識別する(30)プロセッサ構成が、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を該第2検出データセットから識別する(32)インストラクションを有しており、そして
該第1検出データセット内の該対応する目標植生を識別する(34)プロセッサ構成が、該第1検出データセット内の該対応する目標植生の1つ以上の点を有するもう1つの植生多角形を該第1検出データセットから識別するインストラクションを有する請求項43に記載のシステム。
【請求項55】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択された最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項43に記載のシステム。
【請求項56】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項43に記載のシステム。
【請求項57】
該第1検出データセットが該第2検出データセットの前の時間から存在し、前記時間が約1成長シーズンを有する請求項43に記載のシステム。
【請求項58】
該第1統計値及び第2統計値の比較から該侵入速度を決める該プロセッサ構成が該第2統計値及び第1統計値の差を取り、その差を該約1成長シーズンにより割るインストラクションを有する請求項57に記載のシステム。
【請求項59】
該第1統計値及び該第2統計値の比較から該侵入速度を決定するよう構成された該プロセッサが、
該第2統計値及び該第1統計値の間の差を取り、そしてその差を下式で表される量で割るインストラクションを有し、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nは該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、請求項43に記載のシステム。
【請求項60】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もるよう構成され、
将来時の該目標植生と該関心のある対象の間の間隙距離が下式、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
PTは該将来時に過ぎた成長シーズン度日のパーセンテージを有する、で表される該間隙を決定するインストラクションに従って、該適用することにより該見積もるよう構成される、請求項43に記載のシステム。
【請求項61】
該関心のある対象が、
電力線、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項43に記載のシステム。
【請求項62】
該プロセッサが、1つ以上の追加の目標木用に、請求項43に記載の該プロセッサの構成で、識別する、帰属させる、そして決定するアクションを繰り返すよう(46)更に構成される請求項43に記載のシステム。
【請求項63】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより関心のある対象に対する将来の植生成長を見積もる(44)よう更に構成される請求項62に記載のシステム。
【請求項64】
該プロセッサが、該目標木及び該1つ以上の追加の目標木を含む該第2検出データセットの少なくとも1部分と連携して、該目標木及び該1つ以上の追加の目標木について該関心のある対象に対する該将来の植生成長を表示する(52)よう更に構成される請求項63に記載のシステム。
【請求項65】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もる(44)よう更に構成される請求項43に記載のシステム。
【請求項66】
該プロセッサが、もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標植生に帰着するだろうと見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標木と該関心のある対象の間の見積もられる将来相互作用を説明する相互作用表記録を木データベースに属させる過程、
マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
該目標木を軽減する作業注文を発生する過程、から成るグループから選択されたアクションを行うよう更に構成される請求項65に記載のシステム。
【請求項67】
該プロセッサが、或る種の軽減を勧告するために目標植生侵入方向をテストするよう更に構成される請求項43に記載のシステム。
【請求項68】
或る種の軽減を勧告するために該目標植生侵入方向をテストする該プロセッサ構成が
侵入方向成長ベクトルを決定する、
該侵入方向成長ベクトル用のベクトル角を決定する、
局所的しきい値ベクトルを決定する、
該局所的しきい値ベクトル用局所的しきい値角を決定する、インストラクションを有しており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生が軽減用に刈り取り又はカットを要することを勧告する、そして
もし該ベクトル角が該局所的しきい値角より小さいことが決定されれば、該目標植生が軽減用にサイドトリム又は樹木除去を要することを勧告する、インストラクションを有する請求項67に記載のシステム。
【請求項69】
請求項1記載の関心のある対象に対する植生成長を見積もる方法が、
a)下記の
1)光検出及び測距(LiDAR)データ
2)レーザー走査データ
3)レーダーデータ
4)合成開口レーダーデータ、及び
5)距離測定走査及び3次元点クラウド提供に基づくセンサーからのデータ、
から成るグループから選択された空中から収集された3次元の第2検出データセットから目標植生を識別する過程と(30)、
b)下記の
1)光検出及び測距(LiDAR)データ
2)レーザー走査データ
3)レーダーデータ
4)合成開口レーダーデータ、及び
5)距離測定走査及び3次元点クラウド提供に基づくセンサーからのデータ、
から成るグループから選択された空中から収集された3次元の第1検出データセットから対応する目標植生を識別する過程と(34)、を具備しており、
c)そこでは
1)該第1検出データセットは該第2検出データセットの前の時間に収集されており(26)、
2)該第2検出データセットから該目標植生を識別する該過程(30)は該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を該第2検出データセットから識別する過程(32)を備え、そして
3)該第1検出データセット内の該対応する目標植生を識別する該過程(34)は、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使用する過程(36)を備えており、該植生成長を見積もる方法は又
d)第1統計値を、関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考える過程(38)であって、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離に基づき該対応する目標植生の属性と考えられた該第1統計値は、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から決定される最小距離を有している、該属性と考える過程(38)と、
e)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考える過程(40)であって、該関
心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から決定される最小距離を有している、該属性と考える過程(40)と、
f)侵入速度を決定する過程(42)であって、
1)該第2統計値及び該第1統計値の間の差を取り、そしてその差を下式、
(100%−P1)+100%*n+P2
で表される量で割り、
ここで
2)P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
3)P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
4)nは該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、該決定する過程(42)と、
g)将来時の該目標植生と該関心のある対象の間の間隙距離を決定することにより将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来植生成長を見積もる過程(44)であって、該間隙距離が下式で表され、
1)DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
2)DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
3)D2は該第2統計値を有し、
4)Gaは該侵入速度を有し、
5)P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
6)mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
7)PTは該将来時に過ぎた成長シーズン度日のパーセンテージを有する、該見積もる過程(44)と、
h)1つ以上の追加の目標植生について該上記アクションを繰り返す過程(46)と、
i)該目標植生と該1つ以上の追加の目標植生を有する該第2検出データセットの少なくとも1部分と連携して該目標植生と該1つ以上の追加の目標植生について該関心のある対象に対する該将来の植生成長を表示する過程(52)と
j)もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標木に帰着するだろうと見積もられるなら、
1)ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
2)該目標木と該関心のある対象の間の見積もられる将来相互作用を説明する相互作用表記録を木データベースに属させる過程、
3)マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
4)該目標木を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行う過程と、を具備しており、
k)該関心のある対象が
1)電力線、
2)電力線安全緩衝ゾーン、
3)鉄道軌道
4)鉄道軌道安全緩衝ゾーン、
5)鉄道頭上導体、
6)鉄道頭上導体安全緩衝ゾーン、
7)電話線
8)電話線安全緩衝ゾーン、
9)通信ケーブル
10)通信ケーブル安全緩衝ゾーン、
11)道路、
12)高速道路面、そして
13)道路標識視認セクター、
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される、該植生成長を見積もる方法。
【請求項1】
関心のある対象に対する植生成長を見積もる方法であって、
第2検出データセットから目標植生を識別する過程(30)と、
第1検出データセット内の対応する目標植生を識別する過程であり、該第1検出データセットが該第2検出データセットの前の時間に集められて、該対応する目標植生を識別する過程(34)と、
第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考える過程(38)と、
第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考える過程(40)と、そして
該第1統計値と該第2統計値の比較から侵入速度を決める過程(42)と、を具備する該方法。
【請求項2】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項1に記載の方法。
【請求項3】
該第1及び第2検出データセットの各々が、光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データから成るグループから選択されるデータを有する請求項1に記載の方法。
【請求項4】
該第1検出データセットを集める過程(26)と、そして
該第2検出データセットを集める過程(28)と、を更に具備する請求項1に記載の方法。
【請求項5】
該第1検出データセットを集める過程(26)が、該第1検出データセットを空中から集める過程を更に備えており、そして
該第2検出データセットを集める過程(28)が、該第2検出データセットを空中から集める過程を更に備える請求項4に記載の方法。
【請求項6】
植生応答を識別するために、該第1検出データセット及び/又は第2検出データセットを分類する過程(29)を更に具備する請求項1に記載の方法。
【請求項7】
該第2検出データセットから該目標植生を識別する過程(30)が、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別する過程(32)を備えており、そして
該第1検出データセット内の該対応する目標植生を識別する過程(34)が、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために、該第2検出データセットからの該植生多角形を使う過程(36)を備える請求項1に記載の方法。
【請求項8】
該第2検出データセットから該目標植生を識別する過程(30)が、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別する過程(32)を備えており、そして
該第1検出データセット内の該対応する目標植生を識別する過程(34)が、該第1検出データセットから、該第1検出データセット内の該対応する目標植生の前記1つ以上の点を有するもう1つの植生多角形を識別する過程を備える請求項1に記載の方法。
【請求項9】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択された最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項1に記載の方法。
【請求項10】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の該距離に基づき該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定される該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項1に記載の方法。
【請求項11】
該第1検出データセットが該第2検出データセットの前の前記時間に集められ、前記時間が、該第2検出データセットが集められる時の前に約1成長シーズンを有する請求項1に記載の方法。
【請求項12】
該第1統計値及び該第2統計値の該比較から該侵入速度を決定する過程(42)が該第1統計値及び該第2統計値の間の差を取る過程と、その差を該約1成長シーズンにより割る過程と、を有する請求項11に記載の方法。
【請求項13】
該第1統計値及び該第2統計値の該比較から該侵入速度を決定する過程(42)が、
該第2統計値及び該第1統計値の間の差を取る過程と、そしてその差を下式で表される量で割る過程とを有しており、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nが該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する請求項1に記載の方法。
【請求項14】
将来の期間に亘り該侵入速度を適用する過程により該関心のある対象に対する将来の植生成長を見積もる過程(44)であって、
将来時に該目標植生と該関心のある対象の間の間隙距離を決定する過程であり、該間隙が下式で表され、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mが該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そし
て
PTが該将来時に過ぎた成長シーズン度日のパーセンテージを有する、該決定する過程に依って、前記過程(44)を更に具備する請求項1に記載の方法。
【請求項15】
該関心のある対象が、
電力線(22)、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項1に記載の方法。
【請求項16】
1つ以上の追加の目標植生用に該過程を繰り返す過程(46)を更に具備する請求項1に記載の方法。
【請求項17】
将来の期間に亘り該侵入速度を適用する過程により該関心のある対象に対する将来の植生成長を見積もる過程(44)を更に具備する請求項15に記載の方法。
【請求項18】
該目標植生と該1つ以上の追加の目標植生を有する該第2検出データセットの少なくとも1部分と連携して、該目標植生と該1つ以上の追加の目標植生用に、該関心のある対象に対する該将来植生成長を表示する過程(52)を更に具備する請求項17に記載の方法。
【請求項19】
将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来植生成長を見積もる過程(44)を更に具備する請求項1に記載の方法。
【請求項20】
もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標植生に帰着することが見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標植生と該関心のある対象の間の見積もられる将来相互作用を説明する交互作用表記録を植生データベースに属させる過程、
マップ上の該目標植生に該関心のある対象との見積もられた将来交差のためサービスを要するとしてフラグを立てる過程、そして
該目標植生を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行う過程を更に具備する請求項19に記載の方法。
【請求項21】
軽減の種類を勧告するため目標植生侵入方向をテストする過程を更に具備する請求項1に記載の方法。
【請求項22】
軽減の種類を勧告するために該目標植生侵入方向をテストする過程が、
侵入方向成長ベクトルを決定する過程(110)、
該侵入方向成長ベクトル用のベクトル角βを決定する過程、
局所的しきい値ベクトルを決定する過程(117)、
該局所的しきい値ベクトル用の局所的しきい値角Фを決定する過程、を備えており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生は軽減するために刈り取る又はカットする必要があることを勧告する過程、そして
もし該ベクトル角が該局所的しきい角より小さいことが決定されれば、該目標植生は軽減するためにサイドトリム又は樹木除去をする必要があることを勧告する過程、を備える請求項21に記載の方法。
【請求項23】
関心のある対象に対する植生成長を見積もるためのインストラクションを記憶したコンピュータ読み出し可能な記憶媒体(92)であって、プロセッサにより実行される時、該プロセッサ(90)に
第1検出データセットを提供させ、
第2検出データセットを提供させ、
該第2検出データセットから目標植生を識別させ(30)、
該第1検出データセット内の対応する目標植生を識別させ(34)、該第1検出データセットは該第2検出データセットの前の時刻に集められる条件で、該目標植生を識別させ、
第1統計値を、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えさせ(38)、
第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えさせ(40)、そして
該第1統計値及び第2統計値の比較から侵入速度を決定させる(42)、該インストラクションを記憶したコンピュータ読み出し可能な記憶媒体(92)。
【請求項24】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項25】
該第1及び第2検出データセットの各々が、光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データ、から成るグループから選択されるデータを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項26】
植生応答を識別するために、該第1検出データセット及び/又は第2検出データセットを分類するインストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項27】
該プロセッサにより実行される時、該プロセッサに該第2検出データセットから該目標植生を識別させる該インストラクションが、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別するインストラクションを更に有しており、そして
該プロセッサにより実行される時、該プロセッサに該第1検出データセット内の該対応する目標植生を識別させる該インストラクションが、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使って識別するインストラクションを更に有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項28】
該プロセッサにより実行される時、該プロセッサに該第2検出データセットから該目標植生を識別させる該インストラクションが、該第2検出データセットから、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を識別するインストラクションを更に有しており、そして
該プロセッサにより実行される時、該プロセッサに該第1検出データセット内の該対応する目標植生を識別させる該インストラクションが、該第1検出データセットから、該第1検出データセット内の該対応する目標植生の前記1つ以上の点を有するもう1つの植生多角形を識別するインストラクションを更に有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項29】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択される最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項30】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の該距離に基づき、該対応する目標植生の属性と考えられる該第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定される該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項31】
該第1検出データセットが該第2検出データセットの前の時間から存在し、前記時間は約1成長シーズンを有する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項32】
該プロセッサにより実行される時、該プロセッサに該第1統計値と該第2統計値の比較から侵入速度を決定させる該インストラクションが、該第2統計値と該第1統計値の間の差を取り、その差を該約1成長シーズンにより割るインストラクションを更に有する請求項31に記載のコンピュータ読み出し可能な記憶媒体。
【請求項33】
該プロセッサにより実行される時、該プロセッサに該第1及び該第2統計値の比較から該侵入速度を決定させる該インストラクションが、
該第2統計値及び該第1統計値の間の差を取る過程と、そしてその差を下式で表される量で割るインストラクションを更に有しており、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nが該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項34】
該プロセッサにより実行される時、該プロセッサに将来の期間に亘り該侵入速度を適用することにより、該関心のある対象に対する将来の植生成長を見積もらせる該インストラクションが、
将来時の該目標植生と該関心のある対象の間の間隙距離を決定するインストラクションを更に有しており、該間隙距離が下式で表され、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
PTが該将来時に過ぎた成長シーズン度日のパーセンテージを有する、請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項35】
該関心のある対象が、
電力線、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項36】
1つ以上の追加の目標木用に、識別し、帰属させそして決定するインストラクションを繰り返すインストラクション(46)を更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項37】
該プロセッサにより実行された時、該プロセッサに、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もらせる(44)インストラクションを更に具備する請求項36に記載のコンピュータ読み出し可能な記憶媒体。
【請求項38】
該目標木と該1つ以上の追加目標木を有する該第2検出データセットの少なくとも1部分と連携して、該目標木と該1つ以上の追加目標木について該関心のある対象に対する該将来の植生成長を表示する(52)インストラクションを更に具備する請求項37に記載のコンピュータ読み出し可能な記憶媒体。
【請求項39】
該プロセッサにより実行された時、該プロセッサに、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もらせる(44)インストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項40】
もし該関心のある対象に対する該目標植生の該将来の植生成長が、該将来時の該関心のある対象と交差する該目標植生に帰着することが見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標木と該関心のある対象の間の見積もられる将来交互作用を説明する交互作用表記録を木データベースに属させる過程、
マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
該目標木を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行うインストラクションを更に具備する請求項39に記載のコンピュータ読み出し可能な記憶媒体。
【請求項41】
該プロセッサにより実行された時、該プロセッサに、
軽減の種類を勧告するため目標植生侵入方向をテストさせるインストラクションを更に具備する請求項23に記載のコンピュータ読み出し可能な記憶媒体。
【請求項42】
軽減の種類を勧告するために該目標植生侵入方向をテストするインストラクションが
侵入方向成長ベクトルを決定する(110)、
該侵入方向成長ベクトル用のベクトル角βを決定する、
局所的しきい値ベクトルを決定する(117)、
該局所的しきい値ベクトル用局所的しきい値角Фを決定する、インストラクションを有しており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生が、軽減用に、刈り取り又はカット又はもう1つの下木軽減実務を要することを勧告する、そして
もし該ベクトル角が該局所的しきい値角より小さいことが決定されれば、該目標植生が軽減用にサイドトリム又は樹木除去又はもう1つのサイド成長軽減実務を要することを勧告する、インストラクションを有する請求項41に記載のコンピュータ読み出し可能な記憶媒体。
【請求項43】
関心のある対象に対し植生成長を見積もるシステム(88)であって、
a)プロセッサ(90)であり
1)第2検出データセットから目標植生を識別し(30)、
2)第1検出データセット内の対応する目標植生を識別し(34)、該第1検出データセットは該第2検出データセットの前の時間に集められて、該対応する目標植生を識別し、
3)第1統計値を、該関心のある対象に対し該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考え(38)、
4)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考え(40)、そして
5)該第1統計値と該第2統計値の比較から侵入速度を決定する(42)、よう構成された該プロセッサと(90)、
b)該プロセッサに接続され、該プロセッサに該第1及び第2検出データセットを提供するよう構成されたデータ入力部と(94)、
c)該プロセッサか又は該データ入力部の何れかに接続されたユーザーインターフエースと(106)、を具備する該システム。
【請求項44】
該プロセッサ(90)に接続されたデータベース(98)を更に具備する請求項43に記載のシステム。
【請求項45】
該データ入力部(94)に接続された該データベース(98)を更に具備する請求項43に記載のシステム。
【請求項46】
該データ入力部(94)に接続された検出データ取り込みデバイス(96)を更に具備する請求項43に記載のシステム。
【請求項47】
該検出データ取り込みデバイス(96)が、光検出及び測距(LiDAR)システム、レーザー走査システム、レーダーシステム、合成開口レーダーシステム、距離測定走査及び3次元点クラウド提供に基づくセンサーを使うシステム、デジタル画像形成システム、及びハイパースペクトラル画像形成システムから成るグループから選択される請求項46に記載のシステム。
【請求項48】
該検出データ取り込みデバイス(96)が無線接続により該データ入力部(94)に接続される請求項46に記載のシステム。
【請求項49】
該プロセッサ(90)及び該データ入力部(94)がネットワーク(104)を経由して一緒に接続される請求項43に記載のシステム。
【請求項50】
該第1及び第2検出データセットの各々が3次元データセットを有する請求項43に記載のシステム。
【請求項51】
該第1及び第2検出データセットの各々が光検出及び測距(LiDAR)データ、レーザー走査データ、レーダーデータ、合成開口レーダーデータ、距離測定走査及び点クラウド提供に基づく何等かのセンサーからのデータ、デジタル画像形成、ビデオ、又はハイパースペクトラル画像形成データから成るグループから選択されるデータを有する請求項43に記載のシステム。
【請求項52】
該プロセッサ(90)が植生応答を識別するために該第1検出データセット及び第2検出データセットを分類する(29)よう更に構成される請求項43に記載のシステム。
【請求項53】
該第2検出データセットから該目標植生を識別する(30)プロセッサ構成が、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を、該第2検出データセットから識別する(32)インストラクションを有しており、そして
該第1検出データセット内の該対応する目標植生を識別する(34)プロセッサ構成が、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使う(36)インストラクションを有する請求項43に記載のシステム。
【請求項54】
該第2検出データセットから該目標植生を識別する(30)プロセッサ構成が、該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を該第2検出データセットから識別する(32)インストラクションを有しており、そして
該第1検出データセット内の該対応する目標植生を識別する(34)プロセッサ構成が、該第1検出データセット内の該対応する目標植生の1つ以上の点を有するもう1つの植生多角形を該第1検出データセットから識別するインストラクションを有する請求項43に記載のシステム。
【請求項55】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の該1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から選択された最小距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から選択された最小距離を有する請求項43に記載のシステム。
【請求項56】
該関心のある対象に対する、該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる第1統計値が、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有しており、そして
該関心のある対象に対する、該第2検出データセット内の該目標植生の1つ以上の点の該距離に基づき、該目標植生の属性と考えられる第2統計値が、該関心のある対象に対する該第2検出データセット内の該目標植生の複数の該1つ以上の点の該距離から決定された該関心のある対象までの平均距離を有する請求項43に記載のシステム。
【請求項57】
該第1検出データセットが該第2検出データセットの前の時間から存在し、前記時間が約1成長シーズンを有する請求項43に記載のシステム。
【請求項58】
該第1統計値及び第2統計値の比較から該侵入速度を決める該プロセッサ構成が該第2統計値及び第1統計値の差を取り、その差を該約1成長シーズンにより割るインストラクションを有する請求項57に記載のシステム。
【請求項59】
該第1統計値及び該第2統計値の比較から該侵入速度を決定するよう構成された該プロセッサが、
該第2統計値及び該第1統計値の間の差を取り、そしてその差を下式で表される量で割るインストラクションを有し、
(100%−P1)+100%*n+P2
ここで
P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
nは該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、請求項43に記載のシステム。
【請求項60】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もるよう構成され、
将来時の該目標植生と該関心のある対象の間の間隙距離が下式、
DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
D2は該第2統計値を有し、
Gaは該侵入速度を有し、
P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
PTは該将来時に過ぎた成長シーズン度日のパーセンテージを有する、で表される該間隙を決定するインストラクションに従って、該適用することにより該見積もるよう構成される、請求項43に記載のシステム。
【請求項61】
該関心のある対象が、
電力線、
電力線安全緩衝ゾーン、
鉄道軌道
鉄道軌道安全緩衝ゾーン、
鉄道頭上導体、
鉄道頭上導体安全緩衝ゾーン、
電話線
電話線安全緩衝ゾーン、
通信ケーブル
通信ケーブル安全緩衝ゾーン、
道路、
高速道路面、そして
道路標識視認セクター
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される請求項43に記載のシステム。
【請求項62】
該プロセッサが、1つ以上の追加の目標木用に、請求項43に記載の該プロセッサの構成で、識別する、帰属させる、そして決定するアクションを繰り返すよう(46)更に構成される請求項43に記載のシステム。
【請求項63】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより関心のある対象に対する将来の植生成長を見積もる(44)よう更に構成される請求項62に記載のシステム。
【請求項64】
該プロセッサが、該目標木及び該1つ以上の追加の目標木を含む該第2検出データセットの少なくとも1部分と連携して、該目標木及び該1つ以上の追加の目標木について該関心のある対象に対する該将来の植生成長を表示する(52)よう更に構成される請求項63に記載のシステム。
【請求項65】
該プロセッサが、将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来の植生成長を見積もる(44)よう更に構成される請求項43に記載のシステム。
【請求項66】
該プロセッサが、もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標植生に帰着するだろうと見積もられるなら、
ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
該目標木と該関心のある対象の間の見積もられる将来相互作用を説明する相互作用表記録を木データベースに属させる過程、
マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
該目標木を軽減する作業注文を発生する過程、から成るグループから選択されたアクションを行うよう更に構成される請求項65に記載のシステム。
【請求項67】
該プロセッサが、或る種の軽減を勧告するために目標植生侵入方向をテストするよう更に構成される請求項43に記載のシステム。
【請求項68】
或る種の軽減を勧告するために該目標植生侵入方向をテストする該プロセッサ構成が
侵入方向成長ベクトルを決定する、
該侵入方向成長ベクトル用のベクトル角を決定する、
局所的しきい値ベクトルを決定する、
該局所的しきい値ベクトル用局所的しきい値角を決定する、インストラクションを有しており、
もし該ベクトル角が該局所的しきい値角より大きいことが決定されれば、該目標植生が軽減用に刈り取り又はカットを要することを勧告する、そして
もし該ベクトル角が該局所的しきい値角より小さいことが決定されれば、該目標植生が軽減用にサイドトリム又は樹木除去を要することを勧告する、インストラクションを有する請求項67に記載のシステム。
【請求項69】
請求項1記載の関心のある対象に対する植生成長を見積もる方法が、
a)下記の
1)光検出及び測距(LiDAR)データ
2)レーザー走査データ
3)レーダーデータ
4)合成開口レーダーデータ、及び
5)距離測定走査及び3次元点クラウド提供に基づくセンサーからのデータ、
から成るグループから選択された空中から収集された3次元の第2検出データセットから目標植生を識別する過程と(30)、
b)下記の
1)光検出及び測距(LiDAR)データ
2)レーザー走査データ
3)レーダーデータ
4)合成開口レーダーデータ、及び
5)距離測定走査及び3次元点クラウド提供に基づくセンサーからのデータ、
から成るグループから選択された空中から収集された3次元の第1検出データセットから対応する目標植生を識別する過程と(34)、を具備しており、
c)そこでは
1)該第1検出データセットは該第2検出データセットの前の時間に収集されており(26)、
2)該第2検出データセットから該目標植生を識別する該過程(30)は該第2検出データセット内の該目標植生の前記1つ以上の点を有する植生多角形を該第2検出データセットから識別する過程(32)を備え、そして
3)該第1検出データセット内の該対応する目標植生を識別する該過程(34)は、該第1検出データセット内の該対応する目標植生の1つ以上の点を選択するために該第2検出データセットからの該植生多角形を使用する過程(36)を備えており、該植生成長を見積もる方法は又
d)第1統計値を、関心のある対象に対する該第1検出データセット内の該対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考える過程(38)であって、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離に基づき該対応する目標植生の属性と考えられた該第1統計値は、該関心のある対象に対する該第1検出データセット内の該対応する目標植生の該1つ以上の点の該距離から決定される最小距離を有している、該属性と考える過程(38)と、
e)第2統計値を、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考える過程(40)であって、該関
心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離に基づき該目標植生の属性と考えられる該第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の該1つ以上の点の該距離から決定される最小距離を有している、該属性と考える過程(40)と、
f)侵入速度を決定する過程(42)であって、
1)該第2統計値及び該第1統計値の間の差を取り、そしてその差を下式、
(100%−P1)+100%*n+P2
で表される量で割り、
ここで
2)P1は該第1検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
3)P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、そして
4)nは該第1検出データセットと該第2検出データセットの収集の間の完全成長シーズン数を有する、該決定する過程(42)と、
g)将来時の該目標植生と該関心のある対象の間の間隙距離を決定することにより将来の期間に亘り該侵入速度を適用することにより該関心のある対象に対する将来植生成長を見積もる過程(44)であって、該間隙距離が下式で表され、
1)DT=D2+Ga*(100%−P2+100%*m+PT)
ここで
2)DTは該将来時の該目標植生と該関心のある対象の間の該間隙距離を有し、
3)D2は該第2統計値を有し、
4)Gaは該侵入速度を有し、
5)P2は該第2検出データセットが集められた時過ぎた成長シーズン度日のパーセンテージを有し、
6)mは該第2検出データセットの収集と該将来時の間の完全成長シーズン数を有し、そして
7)PTは該将来時に過ぎた成長シーズン度日のパーセンテージを有する、該見積もる過程(44)と、
h)1つ以上の追加の目標植生について該上記アクションを繰り返す過程(46)と、
i)該目標植生と該1つ以上の追加の目標植生を有する該第2検出データセットの少なくとも1部分と連携して該目標植生と該1つ以上の追加の目標植生について該関心のある対象に対する該将来の植生成長を表示する過程(52)と
j)もし該関心のある対象に対する該目標植生の該将来の植生成長が該将来時の該関心のある対象と交差する該目標木に帰着するだろうと見積もられるなら、
1)ユーザーに該将来時該関心のある対象との見積もられる将来交差を知らせる過程、
2)該目標木と該関心のある対象の間の見積もられる将来相互作用を説明する相互作用表記録を木データベースに属させる過程、
3)マップ上の該目標木に該関心のある対象との見積もられた将来交差のためにサービスを要するとしてフラグを立てる過程、そして
4)該目標木を軽減させる作業注文を発生する過程、から成るグループから選択されたアクションを行う過程と、を具備しており、
k)該関心のある対象が
1)電力線、
2)電力線安全緩衝ゾーン、
3)鉄道軌道
4)鉄道軌道安全緩衝ゾーン、
5)鉄道頭上導体、
6)鉄道頭上導体安全緩衝ゾーン、
7)電話線
8)電話線安全緩衝ゾーン、
9)通信ケーブル
10)通信ケーブル安全緩衝ゾーン、
11)道路、
12)高速道路面、そして
13)道路標識視認セクター、
交通標識視認セクター、
交通照明視認セクター、そして
広告板又は法人標識視認セクター、から成るグループから選択される、該植生成長を見積もる方法。
【図1】

【図2A】
【図2B】
【図2C】

【図3】

【図4】
【図5】

【図6A】
【図6B】
【図7】
【図8】
【図9】

【図10】
【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2013−514596(P2013−514596A)
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2012−544751(P2012−544751)
【出願日】平成22年12月15日(2010.12.15)
【国際出願番号】PCT/US2010/060486
【国際公開番号】WO2011/084471
【国際公開日】平成23年7月14日(2011.7.14)
【出願人】(512082532)ユーテイリテイ・リスク・マネジメント・コーポレーシヨン・エルエルシー (2)
【氏名又は名称原語表記】Utility Risk Management Corporation, LLC
【Fターム(参考)】
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成22年12月15日(2010.12.15)
【国際出願番号】PCT/US2010/060486
【国際公開番号】WO2011/084471
【国際公開日】平成23年7月14日(2011.7.14)
【出願人】(512082532)ユーテイリテイ・リスク・マネジメント・コーポレーシヨン・エルエルシー (2)
【氏名又は名称原語表記】Utility Risk Management Corporation, LLC
【Fターム(参考)】
[ Back to top ]