
株式会社鈴木製作所により出願された特許
1 - 10 / 20
ミシンの気体搬送糸通し装置
【課題】ワンタッチでルーパに糸通しするに当たり、気体供給ポンプの気体供給動作中にルーパ糸通し/縫目形成切換機構の縫目形成状態への異常切換を禁止する。
【解決手段】ミシンモータMからの動力を縫目形成時にルーパ7、8、9を含む縫目形成装置30を駆動する駆動軸5又はルーパ糸通し時に気体供給ポンプ41にそれぞれ伝達するためのクラッチ60と、ルーパ糸通し時に縫目形成装置への動力伝達を遮断して気体供給ポンプに動力を伝達し、縫目形成時に縫目形成装置に動力を伝達して気体供給ポンプへの動力伝達を遮断するようにクラッチを切換えるためのルーパ糸通し/縫目形成切換機構90と、気体供給ポンプの気体供給動作中にルーパ糸通し/縫目形成切換機構の縫目形成状態への異常切換を禁止するための切換禁止機構160とを備えている。
(もっと読む)
1本糸錠縫化ハンドステッチ形成方法及びミシン

【課題】糸を針の糸捕捉鉤で確実に捕捉することができ、ミシンベッド内空間で縫目形成を行えるようにする。
【解決手段】鉤針13、回転する外釜202に装架される揺動する内釜205で構成される釜200、糸引出作動子401の協働によって被縫製体の表面にハンドステッチ縫目、裏面に錠縫縫目を跳び縫いセットとして形成し、鉤針13の第1ストロークにおいて送り歯601により被縫製体をハンドステッチ縫目のための縫目ピッチ送りし、鉤針13の第2ストロークにおいて送り歯601により被縫製体をハンドステッチ縫目間のための縫目間ピッチ送りする。
(もっと読む)
ミシンの気体搬送糸通し装置
【課題】ワンタッチでルーパに糸通しする。
【解決手段】制御ピン31を突設した押ボタン軸32を押圧操作するための押ボタン33と、制御ピンを受容れる第1の制御溝カム部34〜第4の制御溝カム部37を含む制御溝カム38と、糸案内部を担持するとともに第1のバネ39で糸案内部の糸案内出口がルーパのルーパ糸入口に当接する糸通し状態に向けて弾撥される連結移動板40と、主軸2と一体的に回転して押ボタン軸の先端部41が当接する周面80及び嵌合する切欠部81を有する連結位置決め板82とを含むルーパ糸通し・縫製切換機構30を備えている。
(もっと読む)
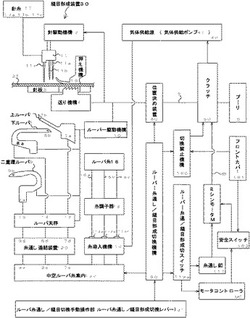
ミシンの気体搬送糸通し装置
【課題】ルーパ糸を搬送する為の加圧気体を縫目形成装置を駆動するモータを切換えて動作する供給ポンプで生成し、ワンタッチでルーパに糸通しする。
【解決手段】ルーパ7〜9に導かれるルーパ糸を差入るルーパ糸導入機構110と、ルーパ糸入口7a〜9aまで延在しルーパ糸案内出口7d〜9dを有する中空ルーパ糸案内130と、ルーパ糸をルーパ糸導入領域から中空ルーパ糸案内を通りルーパ糸剣先出口7b〜9bへ搬送によりルーパ糸通しする供給ポンプ41と、モータMからの動力を縫目形成時にルーパを含む縫目形成装置を駆動する駆動軸5又はルーパ糸通し時に供給ポンプにそれぞれ伝達するためのクラッチ60と、ルーパ糸通し時に縫目形成装置への動力伝達を遮断して供給ポンプに動力を伝達し、縫目形成時に縫目形成装置に動力を伝達して供給ポンプへの動力伝達を遮断するようにクラッチを切換えるためのルーパ糸通し縫目形成切換機構90を備える。
(もっと読む)
1本糸錠縫化ハンドステッチミシン
【課題】1本糸錠縫化ハンドステッチミシンにおいて、鉤針を回動軸として被縫製体を手動回動操作するにあたり、被縫製体の布厚に応じて押え金の押え上がり量を調節する。
【解決手段】鉤針が上死点から下降して被縫製体に貫通し、下死点から上昇して被縫製体から抜け出す前に、被縫製体を針板12上で押え金501で押圧保持する押圧保持を解除して被縫製体の送り方向を鉤針を回動軸として回動操作するための回動操作/直線送り切換機構540と、被縫製体の布厚に応じて押え金の押え上がり量を調節するための押え上がり量調節機構520とを備えている。
(もっと読む)
1本糸錠縫化ハンドステッチミシン
【課題】1本糸錠縫化ハンドステッチミシンにおいて、鉤針に掛け止められ引上げられる2本の糸の鉤針エグリの反対方向、即ち縫目を形成しつつある側の糸1本を引上げることにより針板下方にある糸の引上げを確実にして綺麗な縫目を形成する。
【解決手段】鉤針13の第2ストロークにおいて鉤針が下死点から上昇し、被縫製体から抜け出す前に糸引出作動子401から釈放された余剰な糸を糸締めするにあたり、第2ストロークにおいて鉤針13が上死点から下降する際に糸捕捉鉤で捕捉されて懸架されている2本の糸のうち縫目を形成しつつある側の糸を引上げるとともに糸捕捉鉤で捕捉されていた糸を釜200が回転して掬うとき引上げられた糸を解放する糸制御作動子801を備えている。
(もっと読む)
三方シールフイルム包装機
【課題】三方シールフイルム包装機において、上下一対の横シーラにおける接近・離反の垂直方向の駆動と、水平方向の往復移動とを行なう機構を簡素化して、製造や保守を容易にし、騒音を発生せず、而も製造コストを低廉とする。
【解決手段】横シーラは、それぞれ平行配置された縦ビーム、横ビーム、柱ビームで形成されたフレームに装着され、かつ定位置に植立されたリニアバー56に沿って往復摺動自在に設けられ、包装フイルムの搬送速度に同期して互いに接近・離反するように横シーラを上下に駆動するダブルクランク機構35と、包装フイルムへの接触時点より包装フイルムからの離反時点まで包装フイルムの搬送速度に同期して横シーラを移動させ、包装フイルムからの離反時点より包装フイルムへの接触時点まで包装フイルムの搬送速度から変速させて横シーラを揺動するスライダクランク機構50とを備えている。
(もっと読む)
1本糸錠縫化ハンドステッチミシン
【課題】縫製を開始する準備作業をきわめて容易に短時間で実行する。
【解決手段】釜は糸が巻装されるボビン211を収納するボビンケース212を内釜205に内蔵し、ボビンケースは内釜と一緒に回転自在に外釜202に装架され、糸出口は、鉤針が針板から上昇するとき釜が回転して針板から離間する方向及び位置においてボビンケースに設けられ、縫製を開始する準備作業として糸を鉤針の糸捕捉鉤に挿入しておくにあたり、ボビンから糸出口を介して引き出された糸の自由端を糸出口と糸案内212bとの間に架設することにより架設されている糸を鉤針が上昇する際に糸捕捉鉤に強制挿入するものである。
(もっと読む)
1本糸錠縫化ハンドステッチ形成方法及びミシン
【課題】糸を針の糸捕捉鉤で確実に捕捉することができ、ミシンベッド内空間で縫目形成を行えるようにする。
【解決手段】鉤針13、回転する外釜202に装架される揺動する内釜205で構成される釜200、糸引出作動子401の協働によって被縫製体の表面にハンドステッチ縫目、裏面に錠縫縫目を跳び縫いセットとして形成し、鉤針13の第1ストロークにおいて送り歯601により被縫製体をハンドステッチ縫目のための縫目ピッチ送りし、鉤針13の第2ストロークにおいて送り歯601により被縫製体をハンドステッチ縫目間のための縫目間ピッチ送りする。
(もっと読む)
1本糸錠縫化ハンドステッチ形成方法及びミシン
【課題】縫糸を針の糸捕捉鉤で確実に捕捉することができ、ミシンベッド内空間で縫目形成を行えるようにする。
【解決手段】鉤針10、回転釜200、偏倚子16、糸引出作動子17及び糸寄せ15の協働によって被縫製体21の表面にハンドステッチ縫目、裏面に錠縫縫目を跳び縫いセットとして形成し、鉤針13の第1ストロークにおいて送り歯401により被縫製体21をハンドステッチ縫目のための縫目ピッチ送りし、鉤針10の第2ストロークにおいて送り歯401により被縫製体をハンドステッチ縫目間のための縫目間ピッチ送りする。
(もっと読む)
1 - 10 / 20
[ Back to top ]