
新明工業株式会社により出願された特許
41 - 50 / 75
自動嵌合方法及びそれを用いた回動量調整方法、回動量調整装置
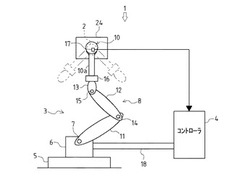
【課題】車両のホイールアライメント調整などを行うに際し、ソケット等により構成される嵌合部の、カムボルト等により構成される被嵌合部に対する位置ずれを広い範囲で吸収(許容)することができるとともに、シンプルな構成により装置の軽量化・省スペース化・低コスト化を図る。
【解決手段】嵌合部を有するツール10(嵌合部材)を、自動的に動作するロボット3(移動手段)により、前記嵌合部が弾性変位可能となるように支持し、ツール10をロボット3によって移動させることにより、前記嵌合部をカムボルト2(被嵌合部材)の被嵌合部に嵌合させる自動嵌合方法であって、ロボット3による動作は、前記嵌合部を、前記被嵌合部に付勢当接させた状態で、前記嵌合部の前記被嵌合部に対する嵌合方向に垂直な面である移動面上にて、前記弾性変位を含め略円状あるいは略楕円状の探り軌跡を描くように移動させる探り動作を含む。
(もっと読む)
二次元コード読取装置および方法並びに生産システム

【課題】ワークこのワークに組み付ける部品に設けた二次元コードの読み取りを正確にかつ安定性よく行え、ひいては前記ワークに関する生産効率の向上を図れ、トレーサビリティーや工程管理等にも寄与する二次元コード読取装置および方法並びに生産システムを提供すること。
【解決手段】順次搬送するワーク1に組み付けられた部品に設けた二次元コード2を複数の画像フィルタリング条件にて読み取り、当該部品に予め割り当てた部品情報を取得する読み取り部3を備え、また、前記ワーク1に予め割り当てたワーク情報とこのワークに組み付けた部品の前記部品情報との照合を行う演算処理部を備えた。
(もっと読む)
自走式搬送車の定位置停止装置
【課題】 減速開始位置の設定及び床面状況にかかわらず、搬送車を加工ステーションに位置ずれなく、また、斜めに傾けることなく、所定の姿勢で確実かつ精度よく停止させることができるようにする。
【解決手段】 搬送車本体7に、加工ステーションSの前後に亘る長さ範囲で床面に設けられた走行ガイドレール18に接触するカムフォロワ19と、走行ガイドレール18側に形成された面取り入口部25aを有する位置決め用被係合部25に対して横方向からの駆動進退により係合離脱自在な位置決め用ローラ26とが備えられており、搬送車Hの停止状態で、ローラ26を駆動進出させて被係合部25に係合させることにより、搬送車本体7を走行方向前後に移動させて搬送車Hの定位置停止を可能としている。
(もっと読む)
吊下げ搬送装置
【課題】直線的な吊下げ搬送だけでなく、曲線的な吊下げ搬送も可能となる安全性の高い低推力の吊下げ搬送装置を提供する。
【解決手段】上方に架設されたレール1に沿って走行する駆動車輪3及びその駆動モータ4を装備した走行台車2と、当該走行台車と一緒に移動する被搬送物品載置用ゴンドラ5とを備えた吊下げ搬送装置において、走行台車とゴンドラとを前記レールに別々の遊転輪付き吊り具12,13で吊下げ支持させ、且つ、走行台車とゴンドラとを折れ曲がり可能な連結体21で連結し、走行台車の遊転輪付き吊り具12を台車本体14に対して縦軸芯周りで回転自在に構成し、ゴンドラの遊転輪付き吊り具13をゴンドラ支柱7aに対して縦軸芯周りで回転自在に構成し、走行台車の駆動車輪3がレールの下面に圧接しながら回転するように構成する。
(もっと読む)
生産システム
【課題】サブライン側に必要な組付用部品のストックスペースを小さくすることができると共に、メインラインにおける組み付け作業の際の組付用部品の誤選択を防止することができ、また、生産計画の変更にも容易かつフレキシブルに対応することができる生産システムを提供すること。
【解決手段】ワークW毎に対応させて設けられた情報記録体2から当該ワークWに関するワーク情報を読み取る読み取り手段3がメインライン1側に設けられていると共に、前記読み取り手段3によって前記情報記録体2から得られたワーク情報を受信する情報端末10,11がサブライン6側に設けられ、前記情報端末10,11において受信した前記ワーク情報に基づいて、サブライン6で生産された組付用部品4が前記搬送体7に移載されるように構成してある。
(もっと読む)
パレット
【課題】ワークを作業に適した姿勢および位置で保持することが可能なパレットを提供すること。
【解決手段】作業対象であるエンジンブロックEgを保持するとともに、生産ラインに沿って移送されるパレットAであって、本体1と、本体1に対して摺動可能に取り付けられた支柱2と、支柱2の摺動方向と異なる方向に延びる回転軸O廻りに支柱2に対して回転可能に保持されており、かつエンジンブロックEgを保持するワーク保持部3と、を備えている。
(もっと読む)
走行型ロボット装置及びその制御方法
【課題】比較的重量物であるワークに対してもアームを肥大化させることなくコンパクト化を図ることができ、ワークの積み降ろしにかかるサイクルタイムを短縮することができる走行型ロボット装置及びその制御方法を提供すること。
【解決手段】複数のリンク機構(第一リンク機構11・第二リンク機構12)により水平方向に旋回可能及び伸縮可能に構成されるアーム7と、アーム7の先端部に設けられワークを支持するフォーク9(ワーク支持体)を支持するとともに昇降及び旋回させるロボットアーム20(昇降旋回手段)とを有するロボット6を、走行台5上に備える走行型ロボット装置1であって、フォーク9と連結され、該フォーク9の、ロボットアーム20による昇降動作、旋回動作及びアーム7の伸縮による水平方向の移動動作をアシストするアシスト手段30を設けた。
(もっと読む)
電動搬送車の走行制御装置
【課題】運搬作業者が停止中の電動搬送車に乗り降りする際、身体の一部や荷物がアクセル操作具に触れても、電動搬送車が不測に動き出すことがないようにする。
【解決手段】車輪2を駆動する走行用モータMと、アクセルレバー3やアクセルペダル18等のアクセル操作具と、アクセル操作具の操作により走行用モータMへの通電状況を変化させて電動搬送車の走行及び停止を行うコントローラ4とを備えた電動搬送車において、前記アクセル操作具から離れた位置に、電動搬送車に搭乗した運搬作業者が運転姿勢にあることを検知するセンサ5を設け、当該センサ5の検出結果に基いてアクセル操作具の操作を牽制及び牽制解除するように構成する。
(もっと読む)
自動走行台車
【課題】低コストで制御や製造をすることができ、不具合が生じにくく、さらに、走行経路を容易に変更することができる自動走行台車を提供すること。
【解決手段】走行経路3,4を自動走行する自動走行台車1,2であって、他の自動走行台車1,2の探知を行う障害物センサ13と、この障害物センサ13によって探知された他の自動走行台車1,2の位置が基準範囲14内であるときに走行停止制御または減速制御が行われる走行部と、前記走行経路3,4に沿って配置されたマーカ8,9,11,12を検出するマーカ検出部と、前記マーカ検出部によるマーカ8,9,11,12の検出結果に基づいて前記基準範囲14を変更する制御部7,10とを備えている。
(もっと読む)
自動走行台車のブレーキ装置
【課題】バッテリの消耗を大幅に軽減できる自動走行台車のブレーキ装置を提供する。
【解決手段】車輪3の外周面を押圧するための摩擦ブロック13と、出力軸14を180度正逆転可能に構成したモータM3と、モータ出力軸14と摩擦ブロック13を枢支連結し、モータ出力軸14の正転により摩擦ブロック13を車輪の外周面に押圧した制動位置に移動させ、モータ出力軸14の逆転により摩擦ブロック13を車輪3の外周面から離れた制動解除位置に移動させる操作力伝達機構15とを備え、摩擦ブロック13が制動位置にあるとき、モータ出力軸14、操作力伝達機構15、摩擦ブロック13、車軸3aが一直線上に位置して、制動状態を機械的にロックするように構成し、且つ、摩擦ブロック13が制動位置と制動解除位置に来たとき前記モータM3への通電が断たれるように構成する。
(もっと読む)
41 - 50 / 75
[ Back to top ]