
フランツ プラツセル バーンバウマシーネン−インズストリーゲゼルシヤフト ミツト ベシユレンクテル ハフツングにより出願された特許
11 - 20 / 29
1つの軌道の2本のレールを溶接するための溶接ユニット
フラッシュ溶接ユニットの各電極(6)が、互いに分離された2つの接触面(7)を有している。これら2つの接触面のうちの、垂直線を基準にして上側の接触面(7)がレール頭部(10)の下側の側面(9)に当接するように構成されていて、下側の接触面(7)が、レール底部の側面(8)に当接するように構成されている。これによって良好な電流の流れが得られる。  (もっと読む)
(もっと読む)
線路位置の計測方法
線路位置は、連続する計測区間(15)において計測される。この場合、計測システム(9)の基準線としてレーザ放射(16)によって形成される長弦(17)を用いて、その都度相対的な線路位置が記録される。この場合、2つの連続する計測区間(15)の両方の長弦(17)により成された角度が計測され、ひいては線路実際位置を再現する空間曲線が得られる。 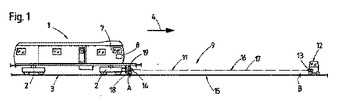 (もっと読む)
(もっと読む)
軌道の締結金具を収容しかつ貯蔵するための機械ならびに方法
軌道(3)の締結金具(2)を収容しかつ貯蔵するための機械(1)が、2つの締結金具収容装置(9)を有している。該締結金具収容装置(9)と、作業方向(6)で見て後側のレール走行装置(4)との間に無限軌道車両(24)が配置されている。機械長手方向に延びる各機械長辺側には、レール(30)を案内するため2つの案内装置(29)が設けられており、該案内装置(29)が、駆動装置(28)によって機械フレーム(5)に対して相対的に調節可能であって、かつ機械長手方向で相前後して配置されている。  (もっと読む)
(もっと読む)
ばら荷のための貯蔵貨車
ばら荷のための貯蔵貨車(1)は、レール走行装置(2)上で走行可能で、貨車長手方向に延びるフロアベルトコンベヤ(6)を備えた積載コンテナ(5)と、フロアベルトコンベヤに接続し、貯蔵されたばら荷を搬送方向(8)に見て前置された別の貯蔵貨車に引き渡すための中継ベルトコンベヤとを有している。積載コンテナ(5)の上端部(19)には、貨車長手方向に延びる補助ベルトコンベヤ(20)が配置されている。この補助ベルトコンベヤ(20)は、駆動装置(21)を介して、貨車長手方向で使用位置に移動するようになっており、この使用位置では、ばら荷を収容するための、搬送方向(8)に関して後方の収容端部(22)が、軌道(3)の直ぐ上に位置決めされており、投下端部(12)が、フロアベルトコンベヤ(6)の上方に位置決めされる。 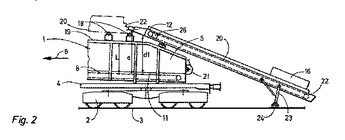 (もっと読む)
(もっと読む)
軌道を沈下させるための方法および機械
軌道(2)を制御して沈下させるために、測定系(10)の、後方の測定箇所(11)で、軌道(2)の長手方向傾き(α)が検出され記憶される。少なくとも10mの進行長さのために、現行の高さプロフィール(16)が形成され、この高さプロフィール(16)に重畳して軌道目標位置を表す後方の補償直線(17)が算出される。後方の測定箇所(11)は、計算によって後方の補償直線(17)に沿って案内されるので、後方の測定箇所(11)と前方の測定箇所(11)との間に位置する中間の測定箇所(11)で、測定弦の位置についての補償値が得られる。  (もっと読む)
(もっと読む)
保管車
保管車(1)が、荷積みコンテナ(5)と、底部コンベヤベルト(6)に接続していて前方の車両端部(9)を越えて突出している引渡しコンベヤベルト(10)とを備えていて、該引渡しコンベヤベルト(10)は、保管されたばら荷を引き渡すために働く。荷積みコンテナ(5)は、互いに平行に延びる2つの側壁(16)を有し、引渡しコンベヤベルト(10)から間隔をおいた後方の車両端部(18)に、両側壁(16)を互いに結合する背壁(19)を有している。背壁(19)は底部コンベヤベルト(6)に対するそのポジションを変化可能であり、その結果、底部コンベヤベルト(6)の損傷なしにばら荷の搬送が可能になる。  (もっと読む)
(もっと読む)
軌道直下を突き固めるための突固めユニット
軌道(3)の3つのまくら木(6)直下を同時に突き固めるための突固めユニット(5)であって、内側の突固め工具と、真ん中の突固め工具と、外側の突固め工具とを有している。内側の突固め工具(12)の旋回軸線(17)は、真ん中の突固め工具(13)の旋回軸線に関して、垂直方向に延びる距離(a)だけ低く位置している。両突固めツール(19)の長手方向軸線(18)は、内側および真ん中の突固め工具(12,13)の旋回軸線(17)に関して中心外で、かつ内側の突固め工具(12)の旋回軸線(17)寄りに位置決めされている。これによって、小さなまくら木区分幅を有するまくら木下でも問題なく突き固めることができる。  (もっと読む)
(もっと読む)
軌道のバラスト道床をクリーニングする方法および装置
軌道(3)のバラスト道床(2)をクリーニングする方法では、バラスト道床の汚れ具合に応じて、第1の作業方法(A)において、バラストの上位の層(34)を、作業方向に関して前方の取込装置(16)によって収容して、第1の搬送ベルトユニット(27)に供給する。これに並行して、残りのバラスト(25)を、作業方向に関して後方の取込装置(20)によって収容して、廃棄を目的として搬出するために、第2の搬送ベルトユニット(29)に供給する。第2の作業方法(B)において、バラスト(25)を、専ら後方の取込装置(20)によって収容して、クリーニングするために第1の搬送ベルトユニット(27)に切り替えて、前方の取込装置(16)を、非運転状態にもたらす。第2の搬送ベルトユニット(29)から第1の搬送ベルトユニット(27)にバラストを選択的に切り替えるための切替装置(33)が設けられている。  (もっと読む)
(もっと読む)
作業列車を監視するコントロール装置および方法
軌道(5)上を走行可能であり起動工事処理を実行するための作業列車(1)を監視するコントロール装置(17)は基本的に、すべての作業車両(2)を相互に接続するコントロールライン(18)とメインコンピュータ(16)によって構成されている。各作業車両(2)には、コントロールライン(18)と接続されている車両識別装置(19)が配属されており、これは個々の作業車両(2)を規定する車両特性データを記憶している。コントロールライン(18)と接続されているメインコンピュータ(16)はディスプレイを有しており、障害メッセージが発生したときにこれによって個々の車両特性データが作業列車(1)における車両位置と組み合わせて表示させることができる。 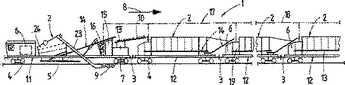 (もっと読む)
(もっと読む)
軌道の欠陥のあるレール部分を取り除くための方法及び機械

【課題】欠陥のある多数のレール部分を効果的に取り除くための方法を提供する。
【解決手段】1回目の分離切断後に2つのレール端部を、これらのレール端部を互いに結合するレール引き寄せ装置20によって掴んで、互いに引き寄せ、次いで2つのレール端部を引き寄せるために必要な引張力並びに実際のレール温度を、目標応力を形成するために必要な、補助レール14の長さを計算するための実際のレール温度を記録し、2回目の分離切断を、2回目の分離切断を、相応に距離を測定して、補助レール14の選択された長さに基づいて計算された間隔で、1回目の分離切断から間隔を保って実施する。
(もっと読む)
11 - 20 / 29
[ Back to top ]