
フランツ プラツセル バーンバウマシーネン−インズストリーゲゼルシヤフト ミツト ベシユレンクテル ハフツングにより出願された特許
21 - 29 / 29
軌道位置修正方法および軌道構造機械
軌道位置修正のために、軌道(8)を一時的な目標位置に持ち上げて、突き固めを行い、次いで軌道(8)を、軌道安定化の範囲内で、振動と共に、垂直方向に作用する荷重を及ぼすことによって、管理下で最終的な目標位置に降下させる。回転可能なブラシ(14)によって、バラスト(19)を、軌道(8)の所望の均等なバラスト分散を達成するために分配する。様々な作業過程の時間経過に関して、軌道安定化後でもブラシ(14)投入後でも、まくらぎ中間域に存在するバラスト(19)を、荷重および振動に関して締め固める。バラスト表面の最終的な締め固めによって、高い車両速度に起因するバラスト飛散を回避することができる。 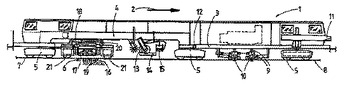 (もっと読む)
(もっと読む)
道床突固め機
軌道突固め機(1)が、―機械長手方向に対して垂直に延びる横方向(19)に関して―それぞれ機械中心(11)のより近くに位置する2つの内側のユニットフレーム(12)と、2つの外側のユニットフレーム(13)とを有している。これらの2つの外側のユニットフレーム(13)は、互いに独立して横方向(19)でシフト可能に下側の横方向ガイド(18)に支承されている。更に、下側の横方向ガイド(18)の上位に位置決めされた、機械フレーム(2)に固定された上側の横方向ガイド(21)が固定されている。下側の横方向ガイド(18)は、それ自体が上側の横方向ガイド(21)にシフト可能に固定された滑子(20)に支承されており且つこれらの滑子に対して横方向(19)で相対的にシフト可能である。外側の各ユニットフレーム(13)はシフト駆動装置(23)と、下側の横方向ガイド(18)に沿って独立して横方向シフトするために結合されている。これにより、外側のユニットフレーム(13)をポイント区分(27)の突固めのために、機械中心(11)から比較的大幅に隔てることが可能である。 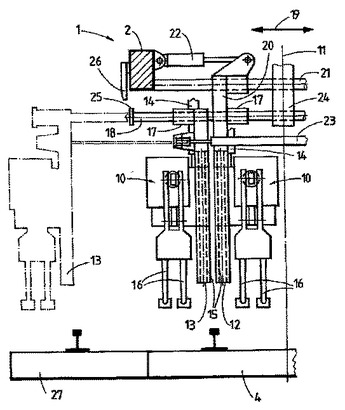 (もっと読む)
(もっと読む)
門形クレーンを搬送するための搬送台車

【課題】無限履帯走行機構を有する門形クレーンを搬送するために、レール走行機構(3)の上で走行可能な積込みプラットホームを有する搬送台車を改良して、搬送台車の上で搬送される門形クレーンを作業使用状態と引渡位置との間で変更することを容易にすること。
【解決手段】搬送台車が積込みプラットホーム(2)を有し、積込みプラットホーム(2)の上に−それぞれ1つの無限履帯走行機構を支えるために設けられて−台車長手方向に対して直角に対を成して互いに向き合って位置する設置プレート(7)が配置されており、該設置プレート(7)が駆動装置(9)により、台車長手方向に対して平行に延びる積込みプラットホーム(2)の制限線(6)を設置プレート(7)が越えるように移動可能に構成されていること。これによって無限履帯走行機構(11)と門形クレーン(10)との簡単な結合が可能になる。
(もっと読む)
軌道の高低狂いの整正のための方法
本発明は、高低狂い(y−)の整正のための方法に関し、この場合に軌道は高低狂い(y−)の各値に依存した余剰持ち上げ(y+)だけ、最終的な目標位置(X)を越えて持ち上げられて、仮の目標位置(Xv)を形成した状態で突き固められる。次いで軌道安定化の範囲で軌道(2)のバラスト道床に種々の圧縮を与えて、所望の目標位置(X)を得るようになっている。これによって、もとの軌道高低狂い位置への軌道の戻りは避けられる。 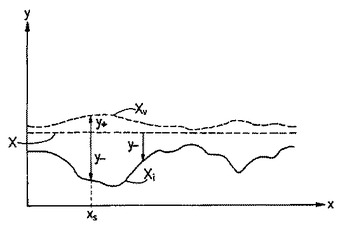 (もっと読む)
(もっと読む)
枕木下の道床を突き固めるための方法

【課題】突固めユニットの動作最適化が得られる方法を提供する。
【解決手段】各突固めサイクル(sz)を、突固めツール(2)が振動される振動シーケンス(x)と、突固めツール(2)が振動しない無振動シーケンス(y)とから構成するようにした。
(もっと読む)
軌道位置修正を実施するための機械
本発明は、軌道位置修正を実施するための機械(1)において、複数部分から成る機械フレーム(6)が設けられており、該機械フレーム(6)に、駆動装置(31)により機械フレーム(6)に対して相対的に調節可能な、つき固めユニット(9)ならびに軌道持上げユニット(12)を備えたサテライトフレーム(13)と、安定化ユニット(11)とが対応配置されている形式のものに関する。サテライトフレーム(13)と安定化ユニット(11)との間に、駆動装置(27)により機械フレーム(6)に対して相対的にスライド可能な第2のつき固めユニット(9)が配置されているようにした。 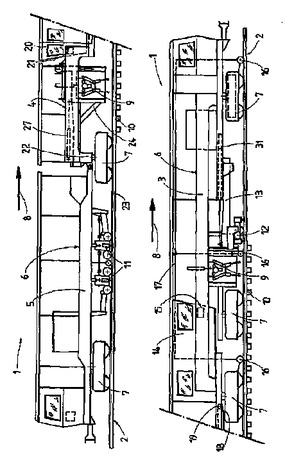 (もっと読む)
(もっと読む)
軌道位置を検出するための方法及び軌道のバラストをクリーニングするためのクリーニング機械
【課題】問題無く比較的簡単に実施でき且つ正確な軌道位置の再生が可能な、冒頭で述べた形式の方法若しくはクリーニング機械を提供する。
【解決手段】第1の測定弦(13)の第1のアーチ高さセンサ(16)によって測定されたアーチ高さ(fx)を、局所的な軌道ポイント(Px)に関する目標位置として後方の終端点(A2)を記録するための距離測定との関連においてメモリし、
ロ)第2の測定弦(14)の後方の終端点(B2)が局所的な軌道ポイント(Px)に到達した後で、第2の測定弦(14)に対応配置された第2のアーチ高さセンサ(17)がメモリされた前記アーチ高さ(fx)に相当する測定値延いては目標位置に達するまで前記の後方の終端点(B2)をずらすようにした。
(もっと読む)
分岐器を搬送する機械ならびに方法
軌道分岐器(2)を搬送する機械(1)は、端部側でそれぞれレール走行機構(7)とクローラ式走行機構(8)とを介して軌道上またはバラスト道床上に支持可能である分岐器キャリア(3)を有している。分岐器キャリア(3)は、ケーブルウインチに結合された1つの中央のキャリア区分(4)と、端部側でそれぞれキャリア継手(5)により可倒式に中央のキャリア区分(4)に結合され、走行機構キャリア(9)に支承された2つの端部側のキャリア区分(6)とから構成されている。両端部側のキャリア区分(6)のそれぞれは、回転駆動装置により、キャリア継手(5)のキャリア軸線(30)に対して平行な、キャリア軸線(30)から間隔を置いた走行機構軸線(11)を中心に、走行機構キャリア(9)に対して相対的に旋回可能である。  (もっと読む)
(もっと読む)
ロングレールを搬送しかつ降ろすための搬送車両および方法
ロングレール(13)を搬送するために、2つの搬送車両(1)が互いに連結されている。このような構成では、各搬送車両(1)に、ロングレール(13)の支承ために形成されたレール保持装置(14)または転轍器(8)を搬送するための積載デッキ(9)を択一的に固定するための保持体(11)が設けられている。  (もっと読む)
(もっと読む)
21 - 29 / 29
[ Back to top ]