
東洋食品機械株式会社により出願された特許
1 - 10 / 11
容器のガス置換方法及びその装置
【課題】残存酸素量、置換ガス消費量、置換時における缶からの液こぼれ量の3量を同時に低減できるガス置換方法およびその装置を提供する。
【解決手段】容器開口縁部から開口部中心を通って外部に向けて吹き出す主ガス噴射流路15と、容器開口部中心に対し所定角度を有して前記主ガス噴射流路15を挟んで対称に配置された副ガス噴射流路16を有し、副ガス噴射流路16からの置換ガスの吹き出し角度を100゜〜130゜とする。
(もっと読む)
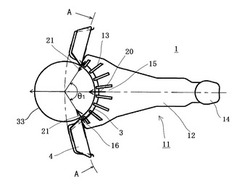
容器蓋巻締ヘッド

【課題】容器蓋の巻締ヘッドの容器蓋を被せる口頸部が傾いていたり、口頸部の中心がずれていても、容器蓋を正しく口頸部に被せるようにすること。
【解決手段】巻締装置の容器蓋巻締ヘッド21は、懸架手段22と懸架手段22に懸架されたチャック手段23とから構成され、懸架手段22とチャック手段23とを連結し懸架手段22の回転をチャック手段23に伝達する伝達手段を設けている。伝達手段はチャック手段23を懸架手段22に対して水平方向へ且つ懸架手段22の軸線方向に対して変位可能に設けるとともに、懸架手段22から下方へ突出する複数のピン31と、チャック手段23に形成され、ピン31を水平方向へ変位可能にする複数の遊嵌孔39を形成した。
(もっと読む)
キャップ巻締め装置及びキャップ巻締め方法
【課題】センサの数を削減して安価に且つ正確にキャップの巻締め角度を制御することができるキャップ巻締め装置とする。
【解決手段】キャップCを把持するキャッピングヘッド12と、キャッピングヘッド12を回転するサーボモータ14と、キャッピングヘッド12を移動させる移動駆動部20と、サーボモータ14を制御する制御装置64と、移動駆動部20によって移動して巻締め中のキャッピングヘッド12が所定位置に達したときのキャッピングヘッド12の高さを検出する高さセンサ62を備えており、制御装置64は、高さセンサ62からの高さ情報から残りのキャップが回転するべき回転角度を求めて、サーボモータ14に指令信号を送出し、サーボモータ14は該指令信号に応じて前記回転角度回転した後、回転を停止することにより、巻締め角度を一定とする。
(もっと読む)
容器の漏れ検出装置及び検出方法
【課題】微小な漏れの検出を可能とし、且つ判定時間の短縮化を図ることができる容器の漏れ検出装置を提供する。
【解決手段】エア源12と、エア源12と容器Cとの間の流路における流量を検出する流量センサ19と、容器に接続される排出路20と、該排出路20の開閉を行なう排出弁22と、を備え、排出弁22は、エア源12から容器Cへと空気が送り込まれる工程においてその少なくとも一部の期間で排出路20を開放して、容器Cからの排出を許容する。
(もっと読む)
容器廃棄処理機
【課題】容器の投入が容易で、操作性・作業性に優れ、安価に構成することができる容器廃棄処理機を提供する。
【解決手段】容器を圧縮するべく往復運動可能な圧縮機51が内部に配設された本体部10と、本体部10内にあって容器に孔を開ける穿刺部55と、本体部10から引き出された引き出し位置と、本体部に引き込まれて容器を圧縮機の作動範囲に位置づける引き込み位置との間で移動可能となっており、容器を本体部へと投入する移動式投入部30と、移動式投入部が引き込み位置にあることを検出する検出部と、検出部から引き込み位置にあることを検出する信号が送出されたことに基づき、前記圧縮機51を作動させる制御部と、を備える。
(もっと読む)
回転交換式スピニングヘッドを用いたキャッピング装置
【課題】シーリングやキャッピングなどの、異なった種類のキャッピング動作をさせようとする場合にスピニングヘッドを取り外し交換する必要のないキャッピング装置を提供する。
【解決手段】容器の口頸部にキャップを装着する動作条件が異なる複数の動作を行うキャッピング装置であって、中心支柱10の回りにカムブロック40を設けるとともにスピニングヘッド70を垂設し、カムブロックの外周に凹溝状の2本のカムトラック42を設け、スピニングヘッドの上方にはカムトラックを移動する2つの従動ローラ52a,52bを備えたスライダー51を設け、下方にはシーリングヘッドSH又はキャッピングヘッドCHを着脱自在に取り付け、スピニングヘッドを180度回転させることでカムトラックにいずれかの従動ローラを収容させて係合させ、スピニングヘッドを自転させることによりキャップのシーリング動作又はキャッピング動作のいずれかをさせて、容器口頸部にキャップを装着する。
(もっと読む)
キャッピング装置
【課題】 ピルファープルーフキャップ及びスクリューキャップといった異なる種類のキャップの装着に対して適用することができ、キャップを装着する際の速度やトルクを制御することができるキャッピング装置を提供する。
【解決手段】 サーボモータ18と、サーボモータ18によってそれぞれ回転可能であり、同心状に配置される内軸38,40及び外筒30,32,34と、サーボモータ18からの回転を選択的に切り替えて内軸38,40及び外筒30,32,34のいずれかに伝達する回転力伝達切替機構60と、内軸及び外筒の先端に設けられ、少なくとも2種類のキャッピングヘッドが着脱可能に取付可能となったヘッド取付部34c、40bと、を備え、内軸及び外筒のいずれかに伝達された回転力をキャッピングヘッドに伝達して、少なくとも2種類のキャップを選択的に容器に装着可能とする。
(もっと読む)
キャッピング方法及びキャッピング装置
【課題】 スレッドローラが容器に被されたキャップに対して回転しながらキャップを容器の螺子部に圧着させることにより、キャップを容器の口部に装着するものにおいて、スレッドローラによって2度巻締めを行なった場合と同様の効果を持たせることができるキャッピング方法及びキャッピング装置を提供する。
【解決手段】 複数のスレッドローラ16,18が、それぞれ少なくとも1つのスレッドローラからなる複数のスレッドローラ群に分けられており、スレッドローラのキャップCに接近して螺子部への圧着を開始しキャップCから離反するまでの一連の動作を、スレッドローラ群毎に異なるタイミングで行なうようにする。
(もっと読む)
ボトル把持体及びボトル口部を把持する方法
【課題】ボトルを搬送する際に発生するボトルの遠心力傾斜を抑制し、搬送中のボトルの姿勢が安定すると共にボトル受渡し時における把持ミスが生ずることのないボトル把持体を提供する。
【解決手段】ボトルを把持する開閉式グリップ装置10に於いて、ボトル口部110の円筒部113を把持するグリップ部11と、ボトル口部の雄ネジ部111を把持するネジサポート部12とを備え、かつ、ボトル口部の円筒部からボトル口部の雄ネジ部までを一体的に把持できるように、前記グリップ部とネジサポート部とが上下方向の厚みを有し一体として形成されていることを特徴とするボトル把持体10。
(もっと読む)
キャップ被冠装置
【課題】 ボトルの口部にキャップを被せてキャップ締機へとボトルを搬送するボトルのキャップ被冠装置において、キャップ締機への供給速度の高速化を図る。
【解決手段】 ボトル1を所定の軌跡15に沿って搬送する搬送ベース12が設けられ、該搬送ベース12には、ボトル1を保持する保持体14,14,・・・が一定ピッチ毎に設けられ、該搬送ベース12は、軌跡15に沿って保持体14に保持されたボトルを一列でキャップ締機9へと供給する一方で、軌跡15の第1点15aから第2点15bまでは複数列でボトル1を搬送し、複数列の各列において、キャップ6を供給する複数のシュート10が設けられて、第1点15aから第2点15bの間でシュート10から供給されたキャップ6をボトル1に被せる。
(もっと読む)
1 - 10 / 11
[ Back to top ]