
コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフトにより出願された特許
101 - 110 / 162
原動機を備えた車両のブレーキ装置作動方法
【課題】原動機を備えた車両の発進をスムーズにし、同時に安全性も最大限に向上させるための、パーキングブレーキの解除時間を短縮したパーキングブレーキの作動方法を提供すること。
【解決手段】車輪回転数センサ12,13により検出された回転数が入力される電子制御ユニット6と、制御ユニット1と、該制御ユニット1により作用力が負荷されるドラムブレーキ4とから成る、原動機を備えた車両用のパーキングブレーキの作動方法であって、前記電子制御ユニット6が、前記制御ユニット1を前記パーキングブレーキを解除するよう制御する前記パーキングブレーキの作動方法において、前記車両が発進しようとし、且つ、前記パーキングブレーキが作用している状態で、前記電子制御ユニット6が、前記車両が位置する場所の進行方向に対する勾配に応じて前記パーキングブレーキの作用力を軽減するよう前記制御ユニットを制御する。 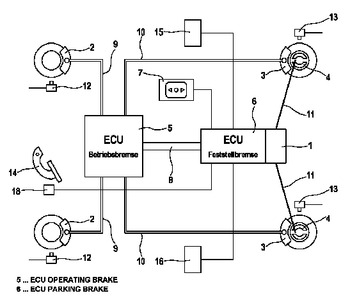 (もっと読む)
(もっと読む)
自動車の安全臨界的作動状態を伝達するための方法および装置
【解決手段】本発明は、自動車の安全臨界的システムの、安全臨界的作動状態を、車両運転者に対して伝達するための方法、および、この方法を実施するための装置に関する。制御ランプを用いての、車両運転者に対する安全臨界的作動状態の伝達は、この制御ランプが故障しており、または、この車両運転者が、この制御ランプを無視した場合に妨害される。従って、車両運転者の走行時の快適性を制限し、且つ、安全臨界的作動状態への注意を、喚起する処置が講ぜられる。  (もっと読む)
(もっと読む)
電気式パーキングブレーキを有する車両用のブレーキ装置及びこのブレーキ装置を制御する方法
本発明は、エネルギー供給装置を有する油圧式の作動ブレーキ装置を備えた車両(1)用のブレーキ装置に関する。このエネルギー供給装置(2;8)は、圧力要求に応じてこの作動ブレーキ装置(4)のマスタブレーキシリンダ(3)の内部にブレーキ圧力を発生させ、このブレーキ圧力は、少なくとも1つのホイールブレーキ及び電気式パーキングブレーキ(10,11,4)に伝達される。本発明によれば、ブレーキ装置は、作動ブレーキ装置の作動の間に、制御装置(12)が、圧力要求と少なくとも1つのホイールブレーキ(4)内のブレーキ圧力との比較に基づいて及び/又は検出された車両加速度と圧力要求を基礎として予測される車両の車両加速度との比較に基づいて、欠陥が作動ブレーキ装置内に存在するかどうかを検査すること、及び、欠陥が確認された時に、制御装置(12)が、電気式パーキングブレーキ(10,11,4)を起動することを特徴とする。さらに本発明は、車両のブレーキ装置を制御する方法に関する。  (もっと読む)
(もっと読む)
油圧式パワーステアリング及びステアリングトルクを算定する方法
本発明は、車両、特に自動車の運転者によって操舵を補助する、ステアリングギヤ及び油圧式アクチュエータを有する油圧式パワーステアリングにあって、追加ステアリングトルクを能動的にかける手段が、この油圧式パワーステアリングに敷設されている油圧式パワーステアリングに関する。追加ステアリングトルクを能動的にかける手段は、少なくとも1つの追加トルクアクチュエータ及びステアリングトルク用の1つの検出手段を有し、この検出手段は、油圧用の圧力検出手段(50)である。  (もっと読む)
(もっと読む)
チャイルドシート用の装置
本発明は、チャイルドシートの快適モードと安全モードとの間を、事故を予測するのに適する情報に依存して切り替える車両内のチャイルドシート用の装置に関する。  (もっと読む)
(もっと読む)
自動車ブレーキシステムのブレーキ作動ユニットを操作する方法
【課題】
再生ブレーキ過程を実施し得る車両における構造的に確定された軸方向隙間が最小にされるこの種のブレーキ操作ユニットを作動する方法を提供すること。
【解決手段】
この発明は、a)ブレーキ- バイ- ワイヤ操作モードにおいてブレーキペダルとブレーキブースタとの間の動力伝達結合を離脱する手段が設けられており、ブレーキペダルにより且つ電子制御ユニットにより運転者要求に依存して操作できるブレーキブースタと、b)ブレーキブースタの下流に接続されたマスターブレーキシリンダと、c)運転者の遅れた要求を検出する手段と、d)ブレーキペダルと協働し、ブレーキペダルに作用するリセット力によりブレーキブースタの作動に無関係にブレーキ- バイ- ワイヤ操作モードで模擬され得て、ブレーキペダルとブレーキブースタの間の動力伝達結合が離脱されるときにブレーキ- バイ- ワイヤ操作モードで接続でき、ブレーキ- バイ- ワイヤ操作モード以外で遮断できるペダル行程シミュレータと、から成るブレーキ- バイ- ワイヤタイプの自動車ブレーキシステムのブレーキ作動ユニットを操作する方法に関する。
再生ブレーキ作用においてブレーキペダル1に連結されたピストンロッド10の端部とブレーキブースタ3の制御弁9の制御ピストン11の間の構造的に所定軸方向隙間「a」を最小化するために、この発明は、ブレーキブースタ(3)の作動が企図されないときに、ブレーキペダル(1)の所定作動行程が戻されるのに対して、ブレーキペダル(1)とブレーキブースタ(3)の間の動力伝達結合が起こる直前にソフトウエアに関連した技術措置が実施され、ブレーキペダル(1)とブレーキブースタ(3)の間の動力伝達結合を阻止することを提供する。 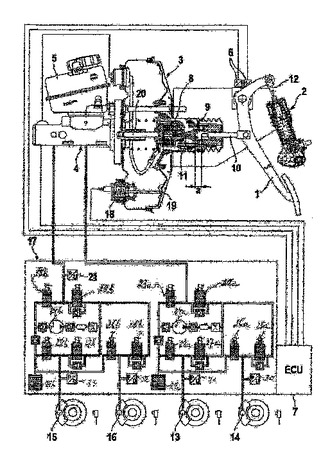 (もっと読む)
(もっと読む)
電気式操舵システムにおけるタイヤ横力の決定方法
電気機械式又は電気油圧式操舵システムを備えた自動車における横力の計算方法を提案する。この方法は、以下の工程を有する。先ずは、ステアリングロッド力を検出し、それから、復元トルク全体を計算する。復元トルク全体は、車輪に作用する様々な力によって引き起こされる復元トルクを含む。これらの復元トルクには、横力によって引き起こされる復元トルクとその他の復元トルクが有る。その他の復元トルクは、測定値にもとづき量的に検出して、復元トルク全体から引き算し、横力によって引き起こされる復元トルクを決定する。最後に、横力によって引き起こされる復元トルクから、横力を算出する。  (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。  (もっと読む)
(もっと読む)
車両の走行推進力の制御方法、その方法を実施する装置とその用途
【課題】
車両の走行状態を任意の走行操縦にて所望状態に適合させること。
【解決手段】
この発明は、走行状態値の運転者指示値に対応する目標値(Ψ’ref )が走行状態値の検出された実際値(Ψ’)と比較されて、動揺モーメント分布が検出されて変更される車両の走行推進力を制御する方法に関する。この方法は、a.走行状態値の目標値(Ψ’ref )と走行状態値の実際値(Ψ’)との比較に基づいて車両の走行状態が決定され、b.所定の走行状態に依存して、予定走行状態に対応する新たな動揺モーメント分布が決定され、c.その新たな動揺モーメント分布が調整されることを実施される。さらに、この発明は、車両の前後車軸において動揺モーメント支持手段と車両の少なくとも一つの走行状態値(Ψ’)を検出するセンサーとを含む車両の走行推進力を制御する装置に関する。この装置は好ましくはヨーモーメントを補償するシステム(ESP)に使用され得る。  (もっと読む)
(もっと読む)
車両における安全手段を制御するための方法と構成
この発明は、車両における少なくとも二つの動作状態で動作可能な安全手段に関する少なくとも一つの作動変数を求めるための方法であって、安全手段の作動状態は、作動変数と所定の閾値との比較結果に従って変更可能であり、近接センサーを用いて、車両の周囲環境内に有る少なくとも一つの物体の物体データを検出し、この物体データは、物体の位置、物体の速度及び物体の移動方向を含むものである方法に関し、この方法は、物体データから、物体の第一の軌道を求めて、この軌道を、物体との衝突を回避するための運転操作を開始しなければならない最も遅い時点までの第一の時間間隔を算出するために用いることと、第一の時間間隔に従って、作動変数を求めることとを特徴とする。更に、この発明は、安全手段を制御するための方法及びその方法を実施するための構成に関する。  (もっと読む)
(もっと読む)
101 - 110 / 162
[ Back to top ]