
テカン・トレーディング・アクチェンゲゼルシャフトにより出願された特許
21 - 26 / 26
液体用容器を移動するための装置および方法
本発明は、液体用容器(2)を移動するための装置(1)と方法とに関する。このような装置は、液体用容器(2)を収容するように設けられた支持ユニット(3)と、ベースユニット(5)であって、これに関連付けて支持ユニット(3)が連結要素(7)を用いて実質的に水平方向に自由に振動するように取り付けられるものと、支持ユニット(3)をベースユニット(5)に関連付けて移動させる移動手段(6)とを備える。本発明による装置(1)は、支持ユニット(3)が、可動であるように少なくとも1つの移動集合体(8)が固定される、少なくとも1つの支持要素(20,21)を備えることを特徴とする。この少なくとも1つの移動集合体(8)は、同一の支持要素(20,21)に対して固定されてこれによって可動となる移動手段(6)と相互作用し、これによって移動もされ得る。これによって同一の支持要素(20,21)と支持ユニット(3)の支持面(28)によって収容される液体用容器(2)とが、支持面(28)がこの少なくとも1つの移動集合体(8)の移動によって互いに対応する対向動作を実施するように設定することが可能である。  (もっと読む)
(もっと読む)
液面検出及び/又は気泡検出を統合したピペット装置
【課題】液体の吸引及び分配のためのピペット装置を提案する。
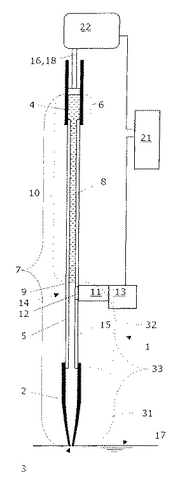
【解決手段】 圧力センサ(12)を有する圧力変換器(11)がガス充満スペース(15)に取り付けられた流体スペース(7)を備えたピペット装置(1)であって、前記流体スペース(7)は、ピペットチップ(2)と、前記ピペットチップ(2)をポンプ(4)に接続する第1チューブ(5)と、前記ポンプ(4)の動作部(6)とによって画成され、前記ピペット装置(1)は、前記流体スペース(7)内のシステム液体(8)のカラム(10)と作用的に接触しているインパルス生成手段(16、18、19)をさらに備え、前記インパルス生成手段(16、18、19)は、このシステム液体カラム10に垂直変動を導くように設計され、それによって、流体スペース(7)と空圧的に接続されたガス充満スペースにおいて圧力変動を生じる。
(もっと読む)
ハイブリダイゼーションチャンバー内における気泡を防止するための装置を有するシステムおよび対応する方法

【課題】ハイブリダイゼーションチャンバー内における気泡の形成をシンプルな仕方で防止できるようにするシステムを提供する。
【解決手段】ギャップ型のチャンバーとして形成されており、スライド(27)のうちの一つとカバー(26)との間を液体で満たす。カバー(26)はスライド(27)との間でハイブリダイゼーションチャンバー(5)が密封されるように位置付けられ、攪拌装置(32)により液体を該チャンバー(5)内へ移動させる。該チャンバー(5)内における気泡を防止するための装置は、チャンバー圧力を構築するための圧力装置として構成され、大気圧以上であって、システム(1)に含まれているスプリングエレメントのため、攪拌圧力差とは無関係であり、このスプリングエレメントはハイブリダイゼーションに使用される液体容積部と接続されており、また、このスプリングエレメントは、攪拌装置により発生される圧力差を弾力的に相殺する。
(もっと読む)
液体サンプル操作用システムにピペットまたはディスペンサチップを配置するための装置および方法
液体サンプルを操作するためのシステムにピペットまたはディスペンサチップを配置するための装置および方法が開示される。本発明に係る装置は、ピペット等を、システム内またはシステム上に配置されたサンプル容器に関してX方向およびX方向と実質的に直交するY方向に配向するためのロボットマニピュレータと、実質的に垂直に延び、かつ上記X方向および上記Y方向と実質的に直交するZ方向に昇降させることのできるピペット等と、上記ロボットマニピュレータを移動させる駆動装置と、上記ロボットマニピュレータおよび/または上記ピペット等の移動および動作を制御するプロセッサとを備えている。前記装置は、少なくとも2つのピペット等がマイクロプレートのウェルのグリッド間隔と実質的に一致する軸間距離を互いに隔てて上にそれぞれ配置された上記ロボットマニピュレータのアーム上に配置された少なくとも2つのブロックを含む。この軸間距離は、マイクロプレートのウェルのグリッド間隔に実質的に一致する。これらのブロックのうち少なくとも1つは、それら2つのブロックの上記ピペット等が共通線に沿って交互かつ千鳥状に配向されるように、上記X方向および上記Y方向に個別に移動可能に構成される。本発明に係る方法は、様々なサンプル容器間、例えばサンプルチューブと24個、96個、384個または1536個のウェルを有するマイクロプレートとの間において液体サンプルの時間を節約するピペット転移を可能にする。  (もっと読む)
(もっと読む)
試験液輸送装置
液体サンプル(4)で作業するシステム(3)において液体を輸送または試験する装置(1)であって、このシステムは、X方向とこれに直交するY方向に存在する水平の作業場(5)を備え、前記装置(1)は、少なくとも1つの機能的端部(22)を備える少なくとも1つの機能的素子(2)を備え、前記機能的素子(2)は前記作業場(5)に対してZ方向に直角に配置される。前記装置(1)は、前記の少なくとも1つの機能的素子(2)の傾動可能な固定保持のための少なくとも1つの傾動ユニットを備える。前記傾動ユニット(8)は、前記作業場(5)に直交するZ軸(11)に相対的に、前記機能的素子(2)の機能的端部(22)の個々のアライメントのための複数のアクチュエータ(10)と、これらのアクチュエータ(10)を電気的に駆動する制御ユニット(17)とを備える。前記機能的素子(2)の各々は、作業場(5)のX方向とY方向に個々にかつ互いに独立に傾動可能である。好ましくは、作業場(5)の少なくとも1つの区分で、少なくともZ方向に前記機能的素子を移動するために組み込まれるロボットアーム(6)に結合され、前記制御ユニット(17)は、ロボットアーム(6)の動きの制御と、前記作業場(5)に垂直なZ軸(11)に相対的に前記機能的素子の機能的端部(22)の位置における変化とを調整する。 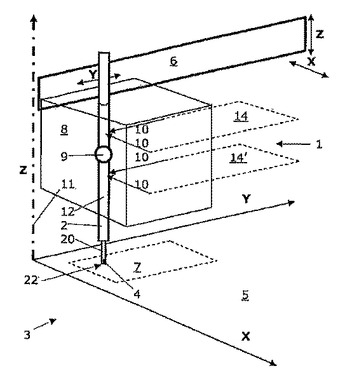 (もっと読む)
(もっと読む)
実験装置上の対象物を識別し、位置決めし、そして追跡するためのデバイスおよび手順
この発明は実験装置(4)のワークテーブル(3)上に位置できる対象物(2)を位置決めするか追跡するシステム(1)に関し、少なくとも、RF信号を送受信し、受信したRF信号を変換し、そして、変換された信号をコンピュータ(7)に送信する能力を持つ中央送信機(5)と、ワークテーブル(3)の表面(8)上に装着され、RF信号を送受信する能力を持つローカルユニット(6)と、位置決めされるか追跡されるべき、ローカルユニット(6)または、実験器具の物品(15)に取り付けられるべきRFIDタグ(10)と、ワークテーブル(3)と、実験装置(4)に結合でき、かつ、インターフェースを介して中央送信機(5)にリンクされるコンピュータ(7)とを備え、コンピュータ(7)は、中央送信機(5)から受信した信号を処理し、そして、中央送信機(5)を通じ、選択されたRFIDタグ(10)をアドレスするために中央送信機(5)と通信する能力を持つ。 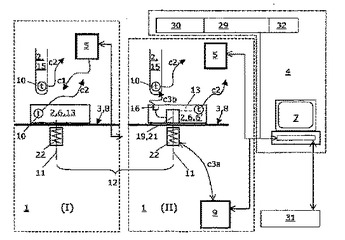 (もっと読む)
(もっと読む)
21 - 26 / 26
[ Back to top ]