
株式会社イクシスリサーチにより出願された特許
1 - 5 / 5
自走式探傷装置
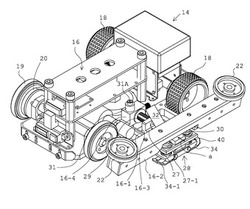
【課題】本発明は自走式探傷装置に関し、鋼床版の下面を磁力に保持されかつ自走しつつ、トラフリブとデッキとの溶接部の亀裂検査行うことを目的とする。
【解決手段】探傷ロボット14は磁石の吸引力下保持されつつ鋼床版の下面を自走する。自走ロボット14には超音波探傷部28がラック及びピニオン及びスライド機構により車幅方向に位置調節可能に設けられる。超音波探傷部28は超音波探傷プローブ30とスキー様のスレッド34とスプリング40とを備える。超音波探傷プローブ30及びスレッド34は被検査面の微妙な傾斜に対してその姿勢を追随可能であり、また、スプリング40は移動方向の前後に設けられ、いずれの方向の移動に対しても被検査面に対し面接触を維持する。スキー様のスレッド先端部34-1は溶接ビード等の凸部の自走乗り越えを可能とする。
(もっと読む)
ロボットナビゲーションシステム

【課題】ロボットを用い、そのロボットが有する腕部等の案内部の動きで所定の目的地への案内を行うロボットナビゲーションシステムを提供する。
【解決手段】ロボットナビゲーションシステム200は、GPS機能を用いて現在地を検出する位置検出部31と、所定の目的地を設定する目的地設定部32と、現在地から所定の目的地への到達ルートを検索するルート探索部33と、ルート探索部33が検索した複数のルートから1つのルートを決定するルート決定部34と、本体部41と、この本体部41に取り付けられ、少なくとも1本の軸回りに回転自在に設けられた案内部43と、目的地に到達するまで決定されたルートにしたがった進路方向を案内部43が指し示すように案内部43の動作を制御する動作制御部44とを有するロボット40と、を具備する。
(もっと読む)
ロボットナビゲーションシステム
【課題】ロボットを用い、そのロボットが有する腕部等の案内部の動きで所定の目的地への案内を行うロボットナビゲーションシステムを提供する。
【解決手段】ロボットナビゲーションシステム100は、目的地Tに信号発信装置12を設置し、信号発信装置12から発信される信号をユーザUが携行するロボット14に受信させて、そのロボット14の動作によりユーザUを目的地Tへ案内する。ロボット14は、本体部21と、2軸回りに回転自在な腕部23と、信号発信装置12から発信される信号を検知してその信号の発信元方向および信号発信装置12までの距離を検出するセンサ部22と、センサ部22が検出した信号の発信元方向を指し示し、検出した距離に応じて腕部23の動作を変化させ、その距離が予め設定された距離よりも短くなったときに腕部23の動作を停止するように腕部23の動作を制御する動作制御部24を有している。
(もっと読む)
床面給電システム
【課題】移動体の可動範囲内において移動体への連続的な給電を可能とする床面給電システムを提供する。
【解決手段】床面給電システム100は、その表面に一定形状の電源電極22とグランド電極23とが所定幅の隙間24を介して交互に並べられた給電パネル11および給電パネル11に所定の電圧を供給する電源12を有する床面給電装置10と、給電パネル11の表面に常時接触する複数の給電端子52および給電パネル11の表面に接地する脚部たる車輪53並びに給電端子52からの給電によって車輪53を駆動するモータ54を有する移動体たるロボット50から構成される。常に、複数の給電端子52のうち、少なくとも1つは電源電極22に接触し、少なくとも1つはグランド電極23に接触するように、給電パネル11の電極パターンと給電端子52の数および配置が調整されている。
(もっと読む)
首部関節機構及びそれを具備するロボット
【課題】ロボットの首部関節機構において、ピッチ方向の回転自由度を大きくすることができ、且つ、掛かるコストを抑制することのできる首部関節機構及びそれを具備するロボットを提供する。
【解決手段】首部ベース部材3と、前記首部ベース部材3の前端側に設けられピッチ方向に回転可能な第一の回転軸4と、前記第一の回転軸4に接続され該第一の回転軸4の回転によりピッチ方向に回動する第一の連結部材5と、前記第一の連結部材5の先端側に設けられた第二の回転軸S2と、前記第二の回転軸S2に後端側が回動自在に接続され上方にロボット頭部11が設けられる第二の連結部材6と、前記第二の連結部材6の前端側と前記首部ベース部材3の後端側の夫々に回動自在に接続された第三の連結部材9とを備える。
(もっと読む)
1 - 5 / 5
[ Back to top ]