
イーストマン コダック カンパニーにより出願された特許
1,521 - 1,530 / 1,594
画像処理の方法およびシステム
デジタル画像内のある領域に対する少なくとも一つの好ましい出力形式を示すための画像処理の方法およびシステムが提供される。その方法によれば、当該デジタル画像内で選択領域が決定され、当該デジタル画像の前記選択領域を含む画像を表すための好ましい出力画像形式が決定され、該決定は当該デジタル画像の画像解像度と、前記決定された選択領域と、各出力形式に対応する出力解像度とに基づく。前記好ましい出力画像形式が示される。 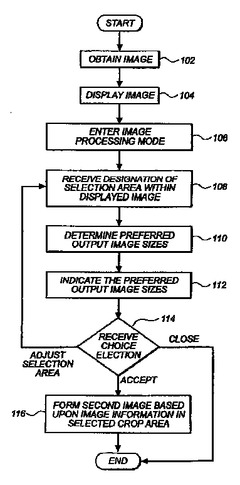 (もっと読む)
(もっと読む)
複数のリードフォトダイオード
イメージセンサ内の光センシング領域から電荷結合デバイスへ電荷を転送する方法であって、この方法は、光生成電荷を収集する光センシング領域と、電荷結合デバイス領域と、それらの間にある転送領域とを含む複数の画素を提供するステップと、前記電荷結合デバイスにバリアを提供して、前記電荷の前記電荷結合デバイスを通った前記転送を生じさせるステップと、前記電荷結合デバイスよりも低いバリアを有する前記転送領域を提供して、前記電荷結合デバイス内の過剰な電荷を前記光センシング領域に流すステップと、を包含する。  (もっと読む)
(もっと読む)
ディスプレイにおけるUV硬化性導電性材料
本発明は、基板と、少なくとも一つのUV硬化性導電性層と、画像形成性層とを含んでなる、ディスプレイ・デバイスに関する。また本発明は、基板と、第1の透明導電性層と、光変調層と、第2の導電性層とを含んでなるディスプレイ・デバイスであって、前記第2の導電性層がUV硬化性である、ディスプレイ・デバイスに関する。 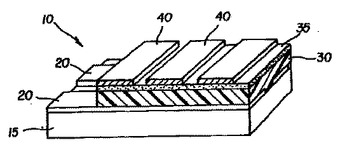 (もっと読む)
(もっと読む)
白色光レーザ
基板と、該基板上に形成された、該基板に垂直なレーザ光の白色ビーム(9)を放射するための1または複数の個々にアドレス可能なレーザ光画素(11)とを含む白色光レーザ一体化構造。1または複数の個々にアドレス可能なレーザ光画素(11)の各々は、1または複数の有機発光ダイオード(14)(OLED)と、該1または複数のOLED(14)により光学的にポンピングされるように配列された複数の有機垂直空洞式レーザ(12B、12R、12G)とを含む。複数の有機垂直空洞式レーザは異なる色の光(13)を放射し、前記1または複数の個々にアドレス可能なレーザ光画素(11)は、異なる色の光(13)が結合されると、実質的に白色光(9)を放射する。  (もっと読む)
(もっと読む)
ポリマー分散型液晶ディスプレイ
基板(15)と、透明な第1の導電体(20)と、第2の導電体(40)と、第1の導電体と第2の導電体の間に配置されたポリマー分散型液晶材料層(30)と、結合剤に含まれた紫外線阻止材料でできていて紫外線がポリマー分散型液晶材料に到達しないように配置にされている少なくとも1つの障壁層(17)とを備えるディスプレイ。このようなディスプレイの製造方法も提供される。  (もっと読む)
(もっと読む)
膨潤性および多孔質層を有する画像形成要素
本発明は、支持体およびインク受容層を含む画像記録要素を提供し、支持体およびインク受容層を含む画像記録要素を提供し、該インク受容層は、前記支持体に近接する少なくとも一層の多孔質層および前記多孔質層に近接し且つ前記画像記録要素の表面上にある少なくとも一層の膨潤性層を含み、前記少なくとも一層の多孔質層は、0.05〜1.0μmのメジアン孔径の孔を有し、そして前記少なくとも一層の膨潤性層は、0.5〜5μmの厚さを有する。本発明の画像記録要素は、インクジェット印刷に特に有用である。 (もっと読む)
ナノ粒子を含む光学エレメント
3〜200μmのRaを有し、粒子サイズ寸法が100nmより小さな微細粒子の分散物を含む表面構造を表面に有する基板を含んでなる光学エレメントを開示する。 (もっと読む)
鏡面反射層を有する保証デバイス
本発明は、少なくとも一つの鏡面反射層(14)、該反射層上の印(12)、該印を覆うポリマー保護層(11)、および該反射層の該印とは反対側のポリマー保護層(10)を含んでなり、該印が感熱色素転写により形成されていることを特徴とする認証デバイス(2)に関する。 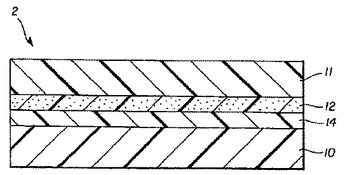 (もっと読む)
(もっと読む)
LCD用補償フィルム
基板上に配置された非晶質ポリマー層を含む液晶ディスプレイ用の光学補償フィルム(603、611)を開示する。該非晶質ポリマー層は、波長λで条件(1)および(2):条件(1)Δnth(λ)が、370nm<λ<700nmの範囲を通して、−0.005よりもさらに負である;条件(2)Δnth(λ1)が、370nm<λ<700nmの範囲を通してλ1<λ2において、Δnth(λ2)よりもさらに負である、の両方を満足する、単調増加関数(すなわち、それは適正な分散を有する)の面外複屈折Δnth(λ)(701、703)を有し、該ポリマーは主鎖外に発色団を有さない。  (もっと読む)
(もっと読む)
医療適用で画像位置合わせ及び画像操作を容易とするプローブ位置測定
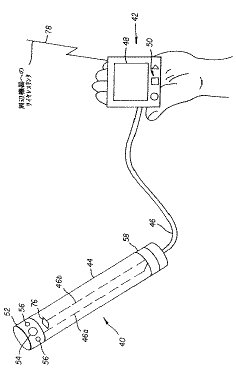
【課題】 画像形成中にセンサ位置及び向きを正確に知ることができる医療画像処理に関する方法を提供することを目的とする。
【解決手段】 医療画像処理適用に関連する画像を位置合わせするのに撮像プローブを用いる方法は、(a)撮像プローブがその中で用いられるローカルな領域中にフィールドを発生するローカル追跡システムを設ける段階と、(b)略同じ対象を表わす第1及び第2の画像を捕捉する段階と、(c)画像捕捉中の撮像プローブの位置座標を決定するのにローカル追跡システムからのフィールド放射を感知する段階と、(d)第1及び第2の画像を位置合わせするのに位置座標を用いる段階と、(e)対象の特徴を決定するのに位置合わせされた画像を用いる段階とを有する。
(もっと読む)
1,521 - 1,530 / 1,594
[ Back to top ]