
Fターム[2B034JB07]の内容
Fターム[2B034JB07]に分類される特許
1 - 6 / 6
移植機
【課題】植付深さを調整する調整レバー及び載せ台からの苗の掻き取り量を変更する変更レバーを設け、植付け深さ調整に整地作業機の昇降高さ調整を連動させる移植機において、左右バランスが良好な移植機を提供する。
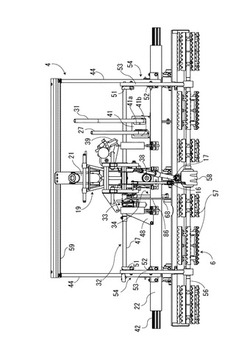
【解決手段】走行機体の後方に配置された苗載せ台と、苗載せ台の下方に配置されて苗を掻き取って圃場に植付ける植付部と、植付部の前方に配置されて圃場を整地する整地作業機6と、昇降作動機構33と、植付深さを調整する調整レバー31と、対地高さの変更に整地作業機6の昇降高さを連動させる連動機構34と、苗載せ台と植付部との距離を変更して苗の掻き取り量を変更する変更レバー27とを備え、植付作業機4の少なくとも一部を構成し、植付作業機の左右の一方側に、昇降作動機構33及び連動機構34を配置するとともに、他方側に調整レバー31及び変更レバー27を配置した。
(もっと読む)
直播機

【課題】車速や圃場の硬軟が変化しても整地ロータによる圃場の整地性能を維持し、同時に粉粒体吐出機から吐出される種子などを適切な深さに播くことができる直播機を提供すること。
【解決手段】走行車両に圃場内に種子を播くための直播装置142と該直播装置142の前方に直播前の圃場を整地するために回転する整地ロータ27a,27bと、後輪伝動軸回転数205の検出する車速に応じて整地ロータ27a,27bの回転速度を変更する整地ロータ変速装置72を備えた直播機であり、整地ロータ27a,27bの回転速度を車速と連動させることで例えば低車速の時に自然に多量の覆土がなされないように整地ロータ27a,27bの回転素幾度を抑えるため、圃場への播種の深さが深くならない。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
農用作業機
【課題】 整地装置の上下操作と整地装置への動力の入切操作とを確実に行えるようにした農用作業機を提供する。
【解決手段】 走行機体11に昇降自在に支持された植付装置31と、前記走行機体11と前記植付装置31との間に配置され、かつ前記植付装置31に連動して昇降する整地装置51と、を備えた農用作業機において、前記整地装置51を前記植付装置31に対して、前記植付装置31に連動して下降した位置において、上下位置を調節する高さ調節手段111を設け、前記整地装置51を苗の植付け深さに対応して高さ調節する。田面と前記整地装置51のかご型ロータ57との相対位置を変化させることなく、確実な整地作業を行うことができる。
(もっと読む)
ロータリ耕耘装置
【課題】 ロータリ耕耘作業と同時に薬剤散布や施肥等の作業や他の動作をなし得るにも拘わらず、トラクタに対するロータリ耕耘装置の着脱を簡単になし得、また、動力取出用の動力取出軸やギヤ等が不要で、ロータリ耕耘装置を安上がりに製造できるようにする。
【解決手段】 入力軸の動力を爪軸に伝達して、爪軸を軸心廻りに回転駆動するようにしたロータリ耕耘装置において、入力軸から爪軸に至る動力伝達経路又は該動力伝達経路から分岐した経路に、爪軸の回転に連動して発電するように発電機が設けられている。また、前記発電機の電力によって駆動される電動手段が具備され、この電動手段の動力によりロータリ耕耘装置側の被駆動部を動かすようにした。
(もっと読む)
農用作業機
【課題】 整地装置の上下操作と整地装置への動力の入切操作とを確実に行えるようにした農用作業機を提供する。
【解決手段】 走行機体11に昇降自在に支持された植付装置31と、前記走行機体11と前記植付装置31との間に配置され、かつ前記植付装置31に連動して昇降する整地装置51と、を備えた農用作業機において、前記走行機体11から前記整地装置51に動力を伝達する動力伝達装置71に介在して、動力伝達を入切するクラッチ73と、前記整地装置51を、前記植付装置31に連動した下降位置において、作業位置と非作業位置とに上下動する上下動手段61と、前記クラッチ73を入切操作すると共に、前記上下動手段61を上下操作する1個の操作手段85と、を備え、前記操作手段85は、前記クラッチ73の入操作位置にて前記上下動手段55が作業位置となるように連動させた。
(もっと読む)
1 - 6 / 6
[ Back to top ]