
Fターム[2B043CB17]の内容
農業機械一般(操向) (6,001) | マーカの構成、配置又は取付け (194) | マーカの切替え又は制御機構 (58) | 切替え作動の逆転機構 (5)
Fターム[2B043CB17]に分類される特許
1 - 5 / 5
苗移植機
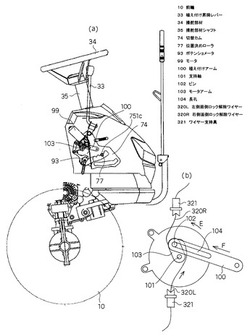
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機

【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
移植機
【課題】操作性が良くかつ迅速に振出し方向の切換えを行うことのできる線引きマーカを備えた移植機を提供する。
【解決手段】植付部が上方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、左右の線引きマーカが共に作業姿勢になる両落ち状態が設定され、この両落ち状態が設定された状態で再度、作業機操作レバーを再度前方側に操作すると、機体左側の線引きマーカが収納姿勢に設定される(ステップS54〜S59)。また、植付部が下方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、機体左側の線引きマーカが収納姿勢に設定されると共に、機体右側の線引きマーカが作業姿勢に設定される(ステップS54,S55,S58,S59)。
(もっと読む)
水田作業車
【課題】水田作業車において、右及び左のマーカーの操作性を向上させる。
【解決手段】右又は左のマーカー19が作用姿勢に操作された作業行程の後に機体が畦際に達すると、作用姿勢の右又は左のマーカー19を格納姿勢に操作し、機体の旋回が行われて次の作業行程に入ると、格納された右又は左のマーカー19とは反対側のマーカー19を作用姿勢に操作するマーカー操作手段54を備える。マーカー操作手段54の作動状態においてマーカー操作手段54に優先して、右及び左のマーカー19を作用姿勢及び格納姿勢に操作する作業用人為操作具12を備える。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
1 - 5 / 5
[ Back to top ]