
Fターム[2B043EB12]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの構成 (119) | 機械式センサ (10)
Fターム[2B043EB12]に分類される特許
1 - 10 / 10
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
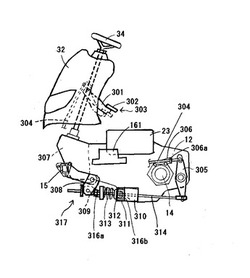
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
作業車両

【課題】作業効率性と作業の均一化に優れた旋回を行う作業車両を提供する。
【解決手段】直進方向を基準として、前記操向ハンドル7の回動角度を検出する角度検知手段51と、作業速度と旋回速度の制御の開始および/または終了の基準となる前記操向ハンドル7の回動角度の閾値Aを設定する角度閾値設定手段61と、前記回動角度の閾値A以上に前記操向ハンドル7が位置する場合の設定旋回車速Vを設定する旋回車速設定手段62と、前記油圧式無段変速装置23の変速アクチュエータ24と、制御手段81とを備え、前記制御手段81は、前記角度検知手段51による検出値が前記回動角度の閾値A以上になると、前記設定旋回車速Vとなるように前記変速アクチュエータ24を作動させ、前記角度検知手段51による検出値が前記回動角度の閾値A未満の場合、前記作業速度になるよう前記変速アクチュエータ24を制御するように構成した。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
作業機の操向角検出構造
【課題】単一センサで操向角度センサを構成できる良さを生かしながら、操向角度センサの取付位置を合理的に設定して、故障等を未然に回避して信頼性の高い作業機の操向角検出構造を提供する。
【解決手段】前輪の操向角度を検出する操向角度センサ47と繰向部材41とを連係機構Bによって連係する。連係機構Bを、繰向部材41より後方に延出された連係ロッド48と、その連係ロッド48の作動を伝達する上下向き姿勢の回転連係軸49とで構成し、操向角度センサ47を前記回転連係軸49の上端部に連係させてある。
(もっと読む)
コンバインの方向制御装置
【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
農作業車の畝間誘導装置
【課題】 曲線的な畝の農地でも、農作業車を畝間の中央方向に自動的に誘導し、タイヤで畝を傷付けることのなく安心して農作業ができ、且つ農作業車の方向転換も容易に行える畝間誘導装置を提供する。
【解決手段】 車体1の最先端下部1cに、先端9aに枢支部10を備えた支持片9を前方に向けて突設し、該枢支部10に両斜め前側方に車輪軸受部を有する左右の腕状軸11を上下擺動可能に枢支し、該腕状軸11の両車輪軸受部12、13に、左右の誘導車輪14、15を、腕状軸11が下向き状態のときに、左右の誘導車輪14、15が正面から見て下開きのハ字型になるように左右対称に傾斜させて回転フリーに装着する。前記腕状軸11は、側面から見た車輪軸受部12、13の位置が支持片の枢支部10の真下方向から前下方へ約45度までの範囲内の前方下がり角度となる長さに設定する。
(もっと読む)
作業車両
【課題】走行機体に搭載されたエンジンの動力を、油圧式駆動装置を介して左右の走行クローラに伝達するように構成する一方、走行機体の進行方向を変更操作するための操向ハンドルを備える作業車両において、不要であるにも拘らず、操向ハンドルの切り過ぎにて走行機体をスピンターンさせ、圃場を荒らすという問題を解消する。
【解決手段】操向ハンドルを左又は右スピンターン領域に回動操作したときに、操向ハンドルの回動操作に対して抵抗を付与するデテント機構370の作用にて、操向ハンドルの操作感触を「重い」状態にする。
(もっと読む)
コンバイン
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
トラクタおよび被牽引車両の操向操作装置とその制御方法
【課題】オペレータは操向操作に熟練度を必要とせず、また牽引式農業用作業機の車輪を操舵することなく構造が簡単でコストが安く、かつ既存の牽引式農業用作業機にも簡単に装着できる操向操作装置およびその制御方法を提供することを目的とする。
【解決手段】トラクタの前輪8の操舵角と農業用作業機の牽引角度を検出、制御して、トラクタの後車軸中心点Tと農業用作業機の車軸中心点Sの走行軌跡を一致させるようにトラクタの牽引中心点Pを油圧モータによって駆動されるスクリューとボールナットからなる操向操作装置11によって左右方向に移動させる。
(もっと読む)
1 - 10 / 10
[ Back to top ]