
除草ロボット

【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、除草ロボットに関し、更に詳しくは自走して表層土を撹拌することにより水田の除草をするロボットに関する。
【背景技術】
【0002】
従来から水田の除草は、有機リン化合物、有機ハロゲン化合物、有機窒素化合物等の除草剤による防除が主力であった。しかし除草剤による雑草の防除は、従来から生態系維持の上から多くの問題が指摘されており、又近年は除草剤抵抗性雑草の出現により新たな問題が提起されている。
【0003】
上記除草剤を使用しない除草方法としては、機械的手段による防除がある。機械的防除においては、ロ−タ式の回転除草機、又は除草爪を土壌の表面に作用させて除草する除草機等が知られている。そしてこれらの除草機は、除草爪の回転、又掻き出しにより水田土壌表面を若干掘り起こして、雑草を土壌中に埋没、又は水面に浮遊させ、枯死させることにより水田除草を行うものである。
【0004】
上記水田除草機には、田植機や管理機に装着し、作業者が乗用で除草作業を行うものと、自走式の除草機に作業者が追従歩行して、除草作業を行うものとがある。このうち乗用型は、作業労力の軽減等を目的として多数の条間を処理できる多連大型なものが多くコストの負担が大きい(例えば、特許文献1を参照。)。一方自走式の除草機は、上記乗用型除草機のような問題は少ないが、夏季の炎天下に水田を歩行して作業を行う必要があり、極めて過酷な作業で作業者の肉体的負担が大きい。
【0005】
更に中耕除草機の多くは、稲の条間の除草は可能であるが、イネの株間、株元の除草は行えない。これは、中耕除草機の除草ロータの幅が、稲の株元との接触を避けるために、稲の条間隔より狭く設定されているためである。このため、株間除草刃を備えた除草機が提案されているが(例えば、特許文献2を参照。)、該除草機は自走式除草機の範疇に属するため前記作業者の負担は解消されず、又、苗が幼苗の場合等においてはその効果は必ずしも十分ではない。したがって、除草剤を使用しないで稲の株間、株元の除草を行うには、手取りによらざるを得なかった。
【0006】
【特許文献1】特開2003−230303号公報
【特許文献2】特開2001−103802号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記の問題を解決し、簡易且つ経済的に水田雑草の防除を可能とする無人の除草ロボットを提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明者は、伝統的に行われていた雑草発芽時期における手作業による水田表層土壌の撹拌作業が、田面水の混濁による太陽光の遮断と、発芽初期の幼若雑草の抜除、浮遊により、水田雑草の防除に多大の効果があることを見出し、本発明に至った。即ち本発明は以下の通りである。
【0009】
本発明は、ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットである。
【0010】
更に本発明は、前記左右に設けられた駆動装置が、左右独立に駆動し、前記左側センサーが障害物を感知すると右側駆動装置が停止し、前記右側センサーが障害物を感知すると左側駆動装置が停止して障害物を避けて直進し、中央センサーが障害物を感知すると左又は右側のいずれかの駆動装置が停止して進行方向を反転させる前記除草ロボットである。
【0011】
更に本発明は、前記撹拌装置が、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌爪からなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌爪と反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いた除草ロボットである。
【発明の効果】
【0012】
本発明のロボットは、圃場において障害物を避けて自立走行し、撹拌装置により土壌表面の表層土を撹拌することにより、発芽初期の幼若雑草を抜除、放置することにより枯死させることができる。更に水田においては、発芽初期の幼若雑草を抜除、浮遊による水田雑草の防除の他に、水田土壌表面の微細な土壌粒子を撹拌することにより、水田の水を混濁させ、太陽光の遮断による発芽の抑制により水田雑草を防除する。したがって、本発明のロボットが圃場内で作動することにより、除草剤を使用せずに、効果的、効率的に圃場の雑草防除を行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて具体的に説明する。
図1は本発明の一実施形態を示すロボットの外観概略図である。図1において、符号10はロボットのボディを、20は駆動装置を、30はセンサー装置を、40及び60はそれぞれ撹拌装置を示す。
【0014】
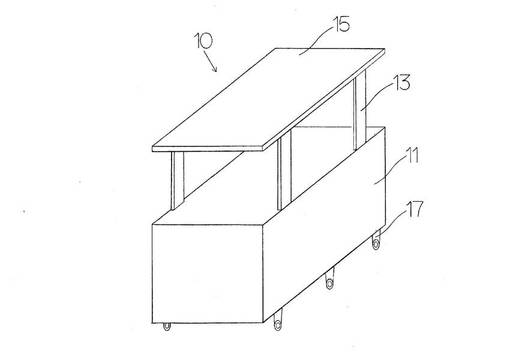
図2はボディ10の構造を示す模式図である。図2において11はボディ本体を示す。ボディ本体は各面がパネルにより形成された中空の直方体で、ボディ本体の上部には支持ステイ13により支持されたシャーシ15が設けられる。前記ボディ本体11、及びシャーシ15は、耐水性素材により形成されることが好ましく、プラスチック樹脂パネルが特に好ましい。
【0015】
前記ボディ本体11の左右側面の下部にはロードホイールの軸受け17が、ボディ本体11の上面パネル及び/又はシャーシ15には、モータ、ギヤーボックス、及び電源装置が配置される。また、ボディ本体上面及び前後面は、撹拌装置の取り付け部が、ボディ本体側面又はシャーシ15にはセンサー取り付け部がそれぞれ設けられる。
【0016】
駆動装置20は、ボディ本体11の上面パネル及び/又はシャーシ15に設置されたバッテリー、及びモータの動力による走行装置により駆動する。走行装置は、広幅ゴム車輪、かご形車輪、ラグ車輪等の車輪式、及びキャタピラを用いる履帯式が好ましく、接地面との抵抗の大きい履帯式がより好ましい。前記履帯式駆動装置の場合は、キャタピラのシュー(履板)が、水田表土の泥土への食い込みが良好な凸型の構造が好ましい。該駆動装置は、本体の方向変換を容易とするために、左右独立に駆動することが好ましい。
【0017】
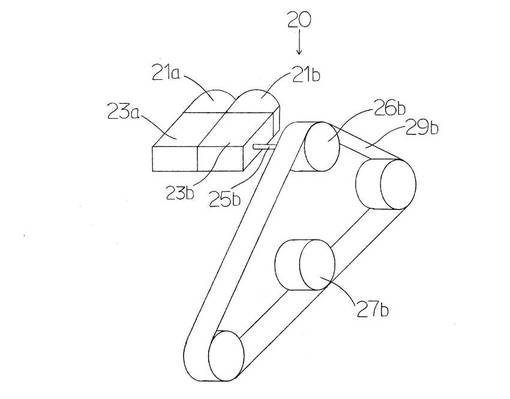
図3は履帯式走行装置を用いた駆動装置20の構造を示す模式図である。図3において21aは右モータを、21bは左モータを、23aは右ギヤーボックスを、23bは左ギヤーボックスを、25bは左動力シャフトを、26bは左スプロケットホイールを、27bは左ロードホイールを、29bは左キャタピラをそれぞれ示す。図には示さないが、右動力シャフト25a、右スプロケットホイール26a、右ロードホイール27a、右キャタピラ29aはそれぞれ、左動力シャフト25b、左スプロケットホイール26b、左ロードホイール27b、左キャタピラ29bと対象に設けられている。
【0018】
前記左右のモータ21a、21b、及び左右のギヤーボックス23a、23bはボディ本体上面に設けられ、左右の動力シャフト25a、25b、及び左右のスプロケットホイール26a、26bを保持し、回転させる。
【0019】
図3において左右の駆動装置の駆動機構はそれぞれ独立で、左右それぞれのモータから、ギヤーボックス、動力シャフト、スプロケットホイール、及びロードホイールを経て、キャタピラに伝達される。
【0020】
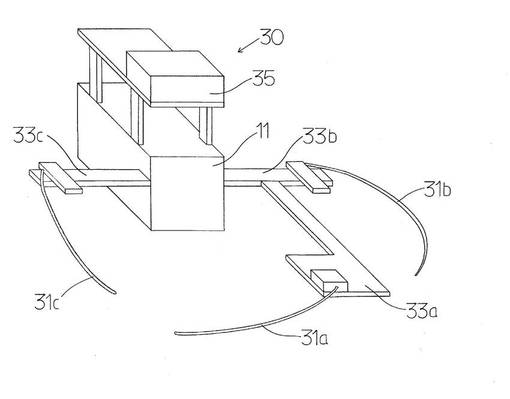
図4は、センサー装置30の構造を示す模式図である。図4において11はボディ本体を、31aは中央センサーを、31bは右センサーを、31cは左センサーを、33aは中央センサーステイを、33bは右センサーステイを、33cは左センサーステイを、35はマイコンをそれぞれ示す。
【0021】
前記右センサー31bはシャーシ又はボディ側面の右前部に設けられ、該右センサー31bは左モータ21bの電力供給部と接続している。該右センサー31bが障害物を感知すると、左モータ21bの電力供給が停止し、その結果左キャタピラのみが停止し、ボディ本体は左に軌道を修正する。右センサー31bの感知が解除されると、左モータへの電力供給が再開され、左キャタピラは再び駆動し、ボディ本体は直進する。左センサー31c、右モータ21a、及び右キャタピラも同様に機能する。
【0022】
前記右モータ21a、左モータ21bの電力供給の停止時間は、ボディ本体が障害物を避けて直進するように設定されるが、該停止時間としてセンサーが障害物を感知している間とすることが、ロボットが障害物を効果的に回避し、作物の条間を直進走行するうえで、より好ましい。
【0023】
前記中央センサー31aはシャーシ又はボディ前部中央に設けられ、該中央センサー31aが前方の障害物を感知すると、マイコン35による制御により左又は右のモータへの電力供給が停止されて、一方のキャタピラのみの駆動によってボディ本体を旋回させる。前記電力供給の停止時間は、ボディ本体が反転するように設定される。
【0024】
前記により中央センサー31aが前方中央の障害物を感知すると、即ち作物の条端まで来ると、ロボットは方向を反転させて隣接する次の条間に進入する。前記左又は右モータへの電力供給及び左又は右のキャタピラの停止が、左右交互に行われることにより、隣接する条間へロボットは連続して走行する。中央センサー31aが感知して前記左又は右モータの電力供給が停止している間は、左右のセンサーは停止するように設定される。中央センサー31aの感知によりボディ本体が反転して次の条間へ進入すると、左右センサーの前記停止は解除され、前記右センサー31b及び左センサー31cが旋回後の進入誘導を補助する。
【0025】
我国の水田は10ないし30アールの広さが一般的で、これに対する稲の作付けは4条から8条用の田植機による機械移植が通常である。該機械移植による場合の稲株の配置は、水田における田植機の旋回所要部(以後枕地部という。)を残し、水田の縦長方向に対し平行に田植機が走行して水田の縦長方向全面(以後縦長方向部という。)が移植され、その後枕地部が縦長方向部とは直角に田植機が走行して、当該水田の移植が完了する。
【0026】
したがって本発明のロボットは、水田の縦長方向部の端部を起点として田植機と同様方向に駆動させることにより、縦長方向部全面を運転させることができる。又前記枕地部についても、枕地部の端部を起点として田植機と同様方向に駆動させることにより、枕地部全面を運転させることができ、水田の他方の枕地部も同様とすることにより、水田全面の駆動が可能である。
【0027】
前記センサーとしては、タッチセンサー又は光センサーを用いることが好ましい。稲の初期生育時は、タッチセンサー又は光センサーのいずれも用いることができるが、稲が分げつ繁茂して以降はタッチセンサーがより好ましい。左右及び中央のいずれのセンサーとも、稲の初期生育時には土壌表面から5〜10cmの高さに設置されることが好ましく、稲が分げつ繁茂して以降は10〜15cmの高さが好ましい。
【0028】
前記撹拌装置は、本発明のロボットに装着され、ロボットの進行にともない作動して水田の表層土を撹拌するものであればいかなる形態のものでもよい。具体的な形態としては、振動式、回転式、回転反発式等の撹拌方式を挙げることができる。
【0029】
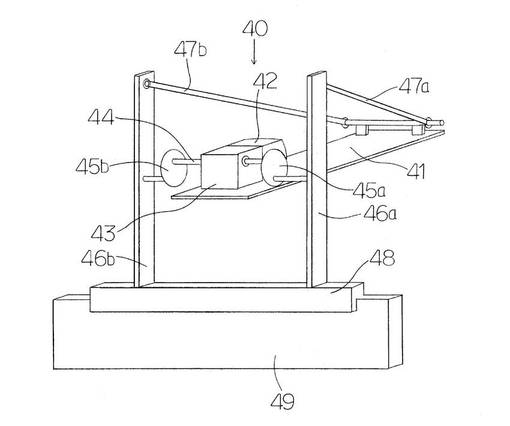
図5は撹拌装置の一つである、振動式撹拌装置40の構造を示す模式図である。図5において41は撹拌装置の支持板を、42はモータを、43はギヤーボックスを、44は動力シャフトを、45aは右クランクを、45bは左クランクを、46aは右クランクアームを、46bは左クランクアームを、47aは右リンクロッドを、47bは左リンクロッドを、48はブレードステイを、49は撹拌ブレードをそれぞれ示す。
【0030】
図5において振動式撹拌装置の支持板41は、ボディ本体の前部又は後部に固定されるが、前部に設けることが、後記の回転式撹拌装置との関係で好ましい。該支持板41に設けられたモータ42の動力は、ギヤーボックス43、動力シャフト44を経由して、左右のクランク45a、45bを回転させる。左右のクランクアーム46a、46bはクランク45a、45bの回転運動と、左右のリンクロッド47a、47bの作用により勾玉状の回転運動となり、撹拌ブレード49を上下前後に振動させて、表層土を撹拌する。
【0031】
撹拌装置における、撹拌ブレード49のブレード先端の形状は、水田の表層土を掻き混ぜ、湛水された水を混濁させるものであれば、いずれの形状のものをも用いることができる。該撹拌ブレードのブレード先端は、ゴムまたは軟質プラスチックなどの弾力性を有する軟質素材で構成されることが好ましい。
【0032】
図5には板型の撹拌ブレードを示すが、該板型の他に撹拌ブレードの板状先端に1〜2cm間隔、深さ1〜2cmに切込みを入れた短冊型や、切込み間隔を0.2〜0.5cmと更に細かくした櫛型等は、弾力性が高く水田表層土の凹凸への対応が柔軟でより好ましく用いることができる。又短冊型や櫛型のブレード先端部分に彎曲の角度を付け熊手状又はフォーク状とした撹拌ブレードは、水田表層土壌との撹拌抵抗が少ない点で更に好ましい。
【0033】
前記ブレードステイ48の横幅は、条間よりも狭く取るが、前記板型撹拌ブレードの横幅は条間とほぼ同様の長さが好ましく、これにより株間の撹拌も可能となる。この場合ブレードステイ48を超える部分は他の部分より軟質であることが好ましく、該超える部分に横方向の切れ込みを有することも、稲への損傷を与えないために好ましい。これにより株元までの表層土の撹拌を効果的に行うことができる。
【0034】
図6は、回転式撹拌装置50の構造を示す模式図である。図6において51は転車軸受けステイを、52はボディ装着部を、53aはブレード固定右車輪を、53bはブレード固定左車輪を、55は撹拌ブレードをそれぞれ示す。
【0035】
図6においてボディ装着部52は、ボディ本体の前部又は後部に固定されるが、後部に設けることが、円滑な運転の面からより好ましい。撹拌ブレード55は、左右のブレード固定車輪53a、53bに固定され、駆動装置の推進力による左右のブレード固定車輪53a、53bの自転にともない回転し、該回転によって表層土を削りながら撹拌する。ブレード固定車輪の外周には、表層土との滑りを防止するためにスパイクが固設されていることが好ましい。
【0036】
前記撹拌ブレード55は、金属または硬質プラスチックなどの硬質の素材で構成されることが好ましい。撹拌ブレードのブレード先端の形状は、水田の表層土を掻き混ぜ、湛水された水を混濁させるものであれば、いずれの形状のものをも用いることができるが、図7に示す螺旋型の他に、かご型ローター状、更に該かご型にスパイクや、凸爪を設けたものも好ましく用いることができる。
【0037】
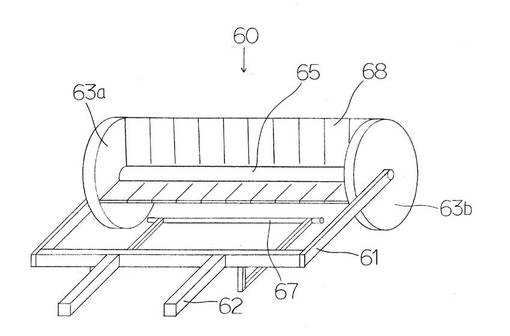
図7は、回転反発式撹拌装置60の構造を示す模式図である。図7において61は車輪軸受けステイを、62はボディ装着部を、63aは右車輪を、63bは左車輪を、65は車輪軸兼撹拌ブレードステイを、67は反発発生固定棒を、68は撹拌ブレードをそれぞれ示す。
【0038】
図7においてボディ装着部62は、ボディ本体の前部又は後部に固定されるが、後部に設けることがより好ましい。左右の車輪63a、63bは駆動装置の推進力により自転し、車輪軸兼撹拌ブレードステイ65を回転させる。車輪軸兼撹拌ブレードステイ65には、弾性を有する撹拌ブレード68が固設され、車輪軸兼撹拌ブレードステイ65の回転に伴い、撹拌ブレード68が回転するが、車輪軸受けステイに固設された反発発生固定棒67により、撹拌ブレードは撓められた後に反発力で表層土を強く撹拌する。前記撹拌ブレード68は、ゴムまたは軟質プラスチックなどの弾性を有する素材で構成される。
【0039】
前記回転反発式撹拌装置における、撹拌ブレード68のブレード先端の形状は、水田の表層土を掻き混ぜ、保水された水を混濁させるものであれば、いずれの形状のものをも用いることができる。図7に示す短冊状ブレード片を車軸に平行に配置したものの他に、前記短冊状ブレード片を車軸に対し1°〜10°の角度をつけて配置したものも好ましい。前記ブレード片の幅は、ブレードの素材により適宜選択されるが、0.5〜5cmが好ましく、1〜3cmがより好ましい。
【0040】
電源は、市販の乾電池及び充電式電池を用いることができ、又ソーラバッテリーも用いることができる。
【実施例】
【0041】
(供試ロボット)
本発明の実施例に用いた除草ロボットを図8に示す。前記除草ロボットのボディ本体、及びシャーシは、いずれもプラスチック樹脂パネルにより形成され、ボディ本体のサイズは、幅7cm、長さ16.5cm、高さ8cmで、シャーシのサイズは幅6cm、長さ16cmで、ボディ本体上部とシャーシとの間隔は5cmである。又該ロボットの自重は1100gである。
【0042】
前記除草ロボットの駆動装置は、市販の乾電池、及びモータ(マブチ社製3ボルト直流モータ)を動力とし、走行装置は履帯式を用いた。左右の駆動装置は、動力部から各々独立とし、左又は右のタッチセンサーが感知している間、それぞれ右又は左の駆動装置の電力が停止し、中央のタッチセンサーが感知すると、交互に右又は左の駆動装置の電力が10秒間停止することにより、反転変換を可能とした。走行装置のキャタピラのシュー(履板)は凸型の構造で、シューの走行方向の長さは6mm、幅は17mmのものを2連(ダブル)で装着し、キャタピラ駆動装置を含めたボディ本体のサイズは、幅14.5cm、長さ17.5cm、高さ12.5cmであった。
【0043】
前記左右、及び中央のセンサーは、いずれも市販のタッチセンサー(タミヤ社製、商品名:壁づたいねずみ工作基本セット)を用いた。前記左右、及び中央のセンサーは、土壌表面から高さ8cmとなるように設定し、いずれも高さ10cm以上の障害物に感知し、前記駆動装置の電力を切断するように設定した。
【0044】
撹拌装置は、ボディ前部にクランク振動式撹拌装置を、ボディ後部に回転反発式撹拌装置を備えた。前記クランク振動式撹拌装置は、市販の前記モータを用い、ブレードステイの幅は21cmとした。撹拌ブレードは、幅30cm、高さ3cm、厚さ2mmの天然ゴム製板を用い、2cm間隔に深さ2cmの短冊状の切れ込みを入れた。該撹拌ブレードは、高さが2cmになるようにブレードステイに固定した。
【0045】
前記回転反発式撹拌装置は、滑り止めスパイクを含めた車輪直径が12cmで、両車輪を含めた外寸幅は19.5cmであった。前記回転反発式撹拌装置の車輪軸に、幅16cm、長さ5cm、厚さ2mmの天然ゴム製板の撹拌ブレード4枚を、各ブレードが直角になるように、放射状に固着した。各ブレードには、1cm間隔に深さ4cmの短冊状の切れ込みを入れ使用した。
【0046】
(実施例1)
長さ124cm、幅66cm、深さ10cmの大型トレイに、宮城県登米市の除草剤不使用水田から採取した雑草種子を含んだ土壌(灰色低地土)を、土層の厚さが2cmとなるように均平に充填し、その後に水深が3cmとなるように湛水して、実施例1の水田(以下簡易水田という。)とした。該簡易水田を屋外に置き、稲苗を植えない裸地で供試した。
【0047】
前記除草ロボットを、前記簡易水田に毎日1回午前9時から40秒間駆動させ、20日間継続した。該除草ロボットの駆動速度は、8m/minとし、前記クランク振動式撹拌装置の土壌撹拌深度を、深さ5mmとなるように設定した。前記除草ロボットは、トレイ壁面に接触すると方向を変換し、前記40秒の間に前記簡易水田全面をカバーした。
【0048】
撹拌開始の翌日以降、撹拌直前の水の混濁持続状態、及び撹拌20日後における雑草の発生量を測定した。水の混濁状態は目視により、その都度5cm四方の白色板を、水深3cmの土壌表面に設置して、水の混濁が見られず透明で白色板を鮮明に確認できる場合を0、水の混濁が強く白色板を全く確認できない場合を3とし、その間の、やや混濁を1、混濁中を2とする4区分により評価し、毎日の評価の平均を示した。又、雑草の発生量は試験終了後に、引き抜き法により雑草個体数を測定し、平米当り本数に換算した。結果を表1に示す。
【0049】
(比較例1)
比較として、実施例と同様に設定した簡易水田において、何も手を加えない区(無処理区)と、前記除草ロボットにおいて、回転反発式撹拌装置を取り外し、クランク振動式撹拌装置の撹拌ブレードの設定位置を実施例1より15mm高くし、表層土に触れないで水だけを撹拌した区(水のみの撹拌区)を設け、各区の水の混濁持続状態及び雑草の発生量を、実施例1と同様に測定した、無処理区に対する雑草の発生量を指数(%)で示した。結果を表1に示す。
【0050】
【表1】

【0051】
表1の結果から、本発明の除草ロボットが表層土を撹拌することにより、水の混濁状態が持続され、除草機能を発揮することが明らかとなった。
【0052】
(実施例2)
本発明の除草ロボットの水田における自立直進、旋回走行状況及び表層土撹拌効果を検証するために、静岡県函南町の10アールの水田(灰色低地土)を用いた。通常のパディハローにより代かきをした後の水田に、4条植えの田植機を用いて、条間30cm、株間17cm、1株あたりの苗数5本として、稲苗を移植した。
【0053】
前記移植から1週間経過後に、本試験を実施した。本試験実施時の水深は3〜5cmで、表層土の凹凸は概ね均平で、又稲の生育状況は草丈12cmであった。除草ロボットの撹拌装置、及び駆動速度は実施例1と同様に調整した。
【0054】
除草ロボットの水田における走行は、表層土の多少の凹凸に対して支障なく、スムーズに走行した。クランク振動式撹拌装置の撹拌ブレードによる移植苗への損傷はなく、クランク振動式撹拌装置及び回転反発式撹拌装置による表層土の撹拌状況は、目視観察による水の混濁状態により判断したが、実際の水田においても有効に撹拌することが確認できた。
【0055】
左右のタッチセンサーによる稲株の感知は良好で、条間の自立直進走行を確保した。又中央のタッチセンサーは、水田の縦長方向に移植された条と直角に交差する枕地に移植された稲株を感知し、隣接する条間への旋回走行を確保し、水田における本除草ロボットの全面の走行が認められた。
【0056】
この結果から、本発明の除草ロボットは、条間の両側に移植された稲株及び前方の稲株を感知して、自立による直進及び旋回走行機能を有することが明らかとなった。
【産業上の利用可能性】
【0057】
本発明のロボットが水田において駆動することにより、簡易且つ経済的に水田雑草の防除を可能となし、除草剤等の使用を抑制し、生態系の維持にも寄与する。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態を示すロボットの外観概略図である。
【図2】ボディの構造を示す模式図である。
【図3】履帯式走行装置を用いた駆動装置の構造を示す模式図である。
【図4】センサー装置の構造を示す模式図である。
【図5】振動式撹拌装置の構造を示す模式図である。
【図6】回転式撹拌装置の構造を示す模式図である。
【図7】回転反発式撹拌装置の構造を示す模式図である。
【図8】本発明の実施例に用いた除草ロボットを示す斜視図である。
【符号の説明】
【0059】
1 除草ロボット
10 ロボットのボディ
11 ボディ本体
13 支持ステイ
15 シャーシ
17 ロードホイールの軸受け
20 駆動装置
21 モータ
23 ギヤーボックス
25 動力シャフト
26 スプロケットホイール
27 ロードホイール
29 キャタピラ
30 センサー装置
31 センサー
33 センサーステイ
35 マイコン
40 振動式撹拌装置
41 支持板
42 モータ
43 ギヤーボックス
44 動力シャフト
45 クランク
46 クランクアーム
47 リンクロッド
48 ブレードステイ
49 振動式撹拌装置撹拌ブレード
50 回転式撹拌装置
51 転車軸受けステイ
52 ボディ装着部
53 ブレード固定車輪
55 回転式撹拌装置撹拌ブレード
60 回転反発式撹拌装置
61 車輪軸受けステイ
62 ボディ装着部
63 車輪
65 車輪軸兼撹拌ブレードステイ
67 反発発生固定棒
68 回転反発式撹拌装置撹拌ブレード
【技術分野】
【0001】
本発明は、除草ロボットに関し、更に詳しくは自走して表層土を撹拌することにより水田の除草をするロボットに関する。
【背景技術】
【0002】
従来から水田の除草は、有機リン化合物、有機ハロゲン化合物、有機窒素化合物等の除草剤による防除が主力であった。しかし除草剤による雑草の防除は、従来から生態系維持の上から多くの問題が指摘されており、又近年は除草剤抵抗性雑草の出現により新たな問題が提起されている。
【0003】
上記除草剤を使用しない除草方法としては、機械的手段による防除がある。機械的防除においては、ロ−タ式の回転除草機、又は除草爪を土壌の表面に作用させて除草する除草機等が知られている。そしてこれらの除草機は、除草爪の回転、又掻き出しにより水田土壌表面を若干掘り起こして、雑草を土壌中に埋没、又は水面に浮遊させ、枯死させることにより水田除草を行うものである。
【0004】
上記水田除草機には、田植機や管理機に装着し、作業者が乗用で除草作業を行うものと、自走式の除草機に作業者が追従歩行して、除草作業を行うものとがある。このうち乗用型は、作業労力の軽減等を目的として多数の条間を処理できる多連大型なものが多くコストの負担が大きい(例えば、特許文献1を参照。)。一方自走式の除草機は、上記乗用型除草機のような問題は少ないが、夏季の炎天下に水田を歩行して作業を行う必要があり、極めて過酷な作業で作業者の肉体的負担が大きい。
【0005】
更に中耕除草機の多くは、稲の条間の除草は可能であるが、イネの株間、株元の除草は行えない。これは、中耕除草機の除草ロータの幅が、稲の株元との接触を避けるために、稲の条間隔より狭く設定されているためである。このため、株間除草刃を備えた除草機が提案されているが(例えば、特許文献2を参照。)、該除草機は自走式除草機の範疇に属するため前記作業者の負担は解消されず、又、苗が幼苗の場合等においてはその効果は必ずしも十分ではない。したがって、除草剤を使用しないで稲の株間、株元の除草を行うには、手取りによらざるを得なかった。
【0006】
【特許文献1】特開2003−230303号公報
【特許文献2】特開2001−103802号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記の問題を解決し、簡易且つ経済的に水田雑草の防除を可能とする無人の除草ロボットを提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明者は、伝統的に行われていた雑草発芽時期における手作業による水田表層土壌の撹拌作業が、田面水の混濁による太陽光の遮断と、発芽初期の幼若雑草の抜除、浮遊により、水田雑草の防除に多大の効果があることを見出し、本発明に至った。即ち本発明は以下の通りである。
【0009】
本発明は、ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットである。
【0010】
更に本発明は、前記左右に設けられた駆動装置が、左右独立に駆動し、前記左側センサーが障害物を感知すると右側駆動装置が停止し、前記右側センサーが障害物を感知すると左側駆動装置が停止して障害物を避けて直進し、中央センサーが障害物を感知すると左又は右側のいずれかの駆動装置が停止して進行方向を反転させる前記除草ロボットである。
【0011】
更に本発明は、前記撹拌装置が、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌爪からなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌爪と反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いた除草ロボットである。
【発明の効果】
【0012】
本発明のロボットは、圃場において障害物を避けて自立走行し、撹拌装置により土壌表面の表層土を撹拌することにより、発芽初期の幼若雑草を抜除、放置することにより枯死させることができる。更に水田においては、発芽初期の幼若雑草を抜除、浮遊による水田雑草の防除の他に、水田土壌表面の微細な土壌粒子を撹拌することにより、水田の水を混濁させ、太陽光の遮断による発芽の抑制により水田雑草を防除する。したがって、本発明のロボットが圃場内で作動することにより、除草剤を使用せずに、効果的、効率的に圃場の雑草防除を行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて具体的に説明する。
図1は本発明の一実施形態を示すロボットの外観概略図である。図1において、符号10はロボットのボディを、20は駆動装置を、30はセンサー装置を、40及び60はそれぞれ撹拌装置を示す。
【0014】
図2はボディ10の構造を示す模式図である。図2において11はボディ本体を示す。ボディ本体は各面がパネルにより形成された中空の直方体で、ボディ本体の上部には支持ステイ13により支持されたシャーシ15が設けられる。前記ボディ本体11、及びシャーシ15は、耐水性素材により形成されることが好ましく、プラスチック樹脂パネルが特に好ましい。
【0015】
前記ボディ本体11の左右側面の下部にはロードホイールの軸受け17が、ボディ本体11の上面パネル及び/又はシャーシ15には、モータ、ギヤーボックス、及び電源装置が配置される。また、ボディ本体上面及び前後面は、撹拌装置の取り付け部が、ボディ本体側面又はシャーシ15にはセンサー取り付け部がそれぞれ設けられる。
【0016】
駆動装置20は、ボディ本体11の上面パネル及び/又はシャーシ15に設置されたバッテリー、及びモータの動力による走行装置により駆動する。走行装置は、広幅ゴム車輪、かご形車輪、ラグ車輪等の車輪式、及びキャタピラを用いる履帯式が好ましく、接地面との抵抗の大きい履帯式がより好ましい。前記履帯式駆動装置の場合は、キャタピラのシュー(履板)が、水田表土の泥土への食い込みが良好な凸型の構造が好ましい。該駆動装置は、本体の方向変換を容易とするために、左右独立に駆動することが好ましい。
【0017】
図3は履帯式走行装置を用いた駆動装置20の構造を示す模式図である。図3において21aは右モータを、21bは左モータを、23aは右ギヤーボックスを、23bは左ギヤーボックスを、25bは左動力シャフトを、26bは左スプロケットホイールを、27bは左ロードホイールを、29bは左キャタピラをそれぞれ示す。図には示さないが、右動力シャフト25a、右スプロケットホイール26a、右ロードホイール27a、右キャタピラ29aはそれぞれ、左動力シャフト25b、左スプロケットホイール26b、左ロードホイール27b、左キャタピラ29bと対象に設けられている。
【0018】
前記左右のモータ21a、21b、及び左右のギヤーボックス23a、23bはボディ本体上面に設けられ、左右の動力シャフト25a、25b、及び左右のスプロケットホイール26a、26bを保持し、回転させる。
【0019】
図3において左右の駆動装置の駆動機構はそれぞれ独立で、左右それぞれのモータから、ギヤーボックス、動力シャフト、スプロケットホイール、及びロードホイールを経て、キャタピラに伝達される。
【0020】
図4は、センサー装置30の構造を示す模式図である。図4において11はボディ本体を、31aは中央センサーを、31bは右センサーを、31cは左センサーを、33aは中央センサーステイを、33bは右センサーステイを、33cは左センサーステイを、35はマイコンをそれぞれ示す。
【0021】
前記右センサー31bはシャーシ又はボディ側面の右前部に設けられ、該右センサー31bは左モータ21bの電力供給部と接続している。該右センサー31bが障害物を感知すると、左モータ21bの電力供給が停止し、その結果左キャタピラのみが停止し、ボディ本体は左に軌道を修正する。右センサー31bの感知が解除されると、左モータへの電力供給が再開され、左キャタピラは再び駆動し、ボディ本体は直進する。左センサー31c、右モータ21a、及び右キャタピラも同様に機能する。
【0022】
前記右モータ21a、左モータ21bの電力供給の停止時間は、ボディ本体が障害物を避けて直進するように設定されるが、該停止時間としてセンサーが障害物を感知している間とすることが、ロボットが障害物を効果的に回避し、作物の条間を直進走行するうえで、より好ましい。
【0023】
前記中央センサー31aはシャーシ又はボディ前部中央に設けられ、該中央センサー31aが前方の障害物を感知すると、マイコン35による制御により左又は右のモータへの電力供給が停止されて、一方のキャタピラのみの駆動によってボディ本体を旋回させる。前記電力供給の停止時間は、ボディ本体が反転するように設定される。
【0024】
前記により中央センサー31aが前方中央の障害物を感知すると、即ち作物の条端まで来ると、ロボットは方向を反転させて隣接する次の条間に進入する。前記左又は右モータへの電力供給及び左又は右のキャタピラの停止が、左右交互に行われることにより、隣接する条間へロボットは連続して走行する。中央センサー31aが感知して前記左又は右モータの電力供給が停止している間は、左右のセンサーは停止するように設定される。中央センサー31aの感知によりボディ本体が反転して次の条間へ進入すると、左右センサーの前記停止は解除され、前記右センサー31b及び左センサー31cが旋回後の進入誘導を補助する。
【0025】
我国の水田は10ないし30アールの広さが一般的で、これに対する稲の作付けは4条から8条用の田植機による機械移植が通常である。該機械移植による場合の稲株の配置は、水田における田植機の旋回所要部(以後枕地部という。)を残し、水田の縦長方向に対し平行に田植機が走行して水田の縦長方向全面(以後縦長方向部という。)が移植され、その後枕地部が縦長方向部とは直角に田植機が走行して、当該水田の移植が完了する。
【0026】
したがって本発明のロボットは、水田の縦長方向部の端部を起点として田植機と同様方向に駆動させることにより、縦長方向部全面を運転させることができる。又前記枕地部についても、枕地部の端部を起点として田植機と同様方向に駆動させることにより、枕地部全面を運転させることができ、水田の他方の枕地部も同様とすることにより、水田全面の駆動が可能である。
【0027】
前記センサーとしては、タッチセンサー又は光センサーを用いることが好ましい。稲の初期生育時は、タッチセンサー又は光センサーのいずれも用いることができるが、稲が分げつ繁茂して以降はタッチセンサーがより好ましい。左右及び中央のいずれのセンサーとも、稲の初期生育時には土壌表面から5〜10cmの高さに設置されることが好ましく、稲が分げつ繁茂して以降は10〜15cmの高さが好ましい。
【0028】
前記撹拌装置は、本発明のロボットに装着され、ロボットの進行にともない作動して水田の表層土を撹拌するものであればいかなる形態のものでもよい。具体的な形態としては、振動式、回転式、回転反発式等の撹拌方式を挙げることができる。
【0029】
図5は撹拌装置の一つである、振動式撹拌装置40の構造を示す模式図である。図5において41は撹拌装置の支持板を、42はモータを、43はギヤーボックスを、44は動力シャフトを、45aは右クランクを、45bは左クランクを、46aは右クランクアームを、46bは左クランクアームを、47aは右リンクロッドを、47bは左リンクロッドを、48はブレードステイを、49は撹拌ブレードをそれぞれ示す。
【0030】
図5において振動式撹拌装置の支持板41は、ボディ本体の前部又は後部に固定されるが、前部に設けることが、後記の回転式撹拌装置との関係で好ましい。該支持板41に設けられたモータ42の動力は、ギヤーボックス43、動力シャフト44を経由して、左右のクランク45a、45bを回転させる。左右のクランクアーム46a、46bはクランク45a、45bの回転運動と、左右のリンクロッド47a、47bの作用により勾玉状の回転運動となり、撹拌ブレード49を上下前後に振動させて、表層土を撹拌する。
【0031】
撹拌装置における、撹拌ブレード49のブレード先端の形状は、水田の表層土を掻き混ぜ、湛水された水を混濁させるものであれば、いずれの形状のものをも用いることができる。該撹拌ブレードのブレード先端は、ゴムまたは軟質プラスチックなどの弾力性を有する軟質素材で構成されることが好ましい。
【0032】
図5には板型の撹拌ブレードを示すが、該板型の他に撹拌ブレードの板状先端に1〜2cm間隔、深さ1〜2cmに切込みを入れた短冊型や、切込み間隔を0.2〜0.5cmと更に細かくした櫛型等は、弾力性が高く水田表層土の凹凸への対応が柔軟でより好ましく用いることができる。又短冊型や櫛型のブレード先端部分に彎曲の角度を付け熊手状又はフォーク状とした撹拌ブレードは、水田表層土壌との撹拌抵抗が少ない点で更に好ましい。
【0033】
前記ブレードステイ48の横幅は、条間よりも狭く取るが、前記板型撹拌ブレードの横幅は条間とほぼ同様の長さが好ましく、これにより株間の撹拌も可能となる。この場合ブレードステイ48を超える部分は他の部分より軟質であることが好ましく、該超える部分に横方向の切れ込みを有することも、稲への損傷を与えないために好ましい。これにより株元までの表層土の撹拌を効果的に行うことができる。
【0034】
図6は、回転式撹拌装置50の構造を示す模式図である。図6において51は転車軸受けステイを、52はボディ装着部を、53aはブレード固定右車輪を、53bはブレード固定左車輪を、55は撹拌ブレードをそれぞれ示す。
【0035】
図6においてボディ装着部52は、ボディ本体の前部又は後部に固定されるが、後部に設けることが、円滑な運転の面からより好ましい。撹拌ブレード55は、左右のブレード固定車輪53a、53bに固定され、駆動装置の推進力による左右のブレード固定車輪53a、53bの自転にともない回転し、該回転によって表層土を削りながら撹拌する。ブレード固定車輪の外周には、表層土との滑りを防止するためにスパイクが固設されていることが好ましい。
【0036】
前記撹拌ブレード55は、金属または硬質プラスチックなどの硬質の素材で構成されることが好ましい。撹拌ブレードのブレード先端の形状は、水田の表層土を掻き混ぜ、湛水された水を混濁させるものであれば、いずれの形状のものをも用いることができるが、図7に示す螺旋型の他に、かご型ローター状、更に該かご型にスパイクや、凸爪を設けたものも好ましく用いることができる。
【0037】
図7は、回転反発式撹拌装置60の構造を示す模式図である。図7において61は車輪軸受けステイを、62はボディ装着部を、63aは右車輪を、63bは左車輪を、65は車輪軸兼撹拌ブレードステイを、67は反発発生固定棒を、68は撹拌ブレードをそれぞれ示す。
【0038】
図7においてボディ装着部62は、ボディ本体の前部又は後部に固定されるが、後部に設けることがより好ましい。左右の車輪63a、63bは駆動装置の推進力により自転し、車輪軸兼撹拌ブレードステイ65を回転させる。車輪軸兼撹拌ブレードステイ65には、弾性を有する撹拌ブレード68が固設され、車輪軸兼撹拌ブレードステイ65の回転に伴い、撹拌ブレード68が回転するが、車輪軸受けステイに固設された反発発生固定棒67により、撹拌ブレードは撓められた後に反発力で表層土を強く撹拌する。前記撹拌ブレード68は、ゴムまたは軟質プラスチックなどの弾性を有する素材で構成される。
【0039】
前記回転反発式撹拌装置における、撹拌ブレード68のブレード先端の形状は、水田の表層土を掻き混ぜ、保水された水を混濁させるものであれば、いずれの形状のものをも用いることができる。図7に示す短冊状ブレード片を車軸に平行に配置したものの他に、前記短冊状ブレード片を車軸に対し1°〜10°の角度をつけて配置したものも好ましい。前記ブレード片の幅は、ブレードの素材により適宜選択されるが、0.5〜5cmが好ましく、1〜3cmがより好ましい。
【0040】
電源は、市販の乾電池及び充電式電池を用いることができ、又ソーラバッテリーも用いることができる。
【実施例】
【0041】
(供試ロボット)
本発明の実施例に用いた除草ロボットを図8に示す。前記除草ロボットのボディ本体、及びシャーシは、いずれもプラスチック樹脂パネルにより形成され、ボディ本体のサイズは、幅7cm、長さ16.5cm、高さ8cmで、シャーシのサイズは幅6cm、長さ16cmで、ボディ本体上部とシャーシとの間隔は5cmである。又該ロボットの自重は1100gである。
【0042】
前記除草ロボットの駆動装置は、市販の乾電池、及びモータ(マブチ社製3ボルト直流モータ)を動力とし、走行装置は履帯式を用いた。左右の駆動装置は、動力部から各々独立とし、左又は右のタッチセンサーが感知している間、それぞれ右又は左の駆動装置の電力が停止し、中央のタッチセンサーが感知すると、交互に右又は左の駆動装置の電力が10秒間停止することにより、反転変換を可能とした。走行装置のキャタピラのシュー(履板)は凸型の構造で、シューの走行方向の長さは6mm、幅は17mmのものを2連(ダブル)で装着し、キャタピラ駆動装置を含めたボディ本体のサイズは、幅14.5cm、長さ17.5cm、高さ12.5cmであった。
【0043】
前記左右、及び中央のセンサーは、いずれも市販のタッチセンサー(タミヤ社製、商品名:壁づたいねずみ工作基本セット)を用いた。前記左右、及び中央のセンサーは、土壌表面から高さ8cmとなるように設定し、いずれも高さ10cm以上の障害物に感知し、前記駆動装置の電力を切断するように設定した。
【0044】
撹拌装置は、ボディ前部にクランク振動式撹拌装置を、ボディ後部に回転反発式撹拌装置を備えた。前記クランク振動式撹拌装置は、市販の前記モータを用い、ブレードステイの幅は21cmとした。撹拌ブレードは、幅30cm、高さ3cm、厚さ2mmの天然ゴム製板を用い、2cm間隔に深さ2cmの短冊状の切れ込みを入れた。該撹拌ブレードは、高さが2cmになるようにブレードステイに固定した。
【0045】
前記回転反発式撹拌装置は、滑り止めスパイクを含めた車輪直径が12cmで、両車輪を含めた外寸幅は19.5cmであった。前記回転反発式撹拌装置の車輪軸に、幅16cm、長さ5cm、厚さ2mmの天然ゴム製板の撹拌ブレード4枚を、各ブレードが直角になるように、放射状に固着した。各ブレードには、1cm間隔に深さ4cmの短冊状の切れ込みを入れ使用した。
【0046】
(実施例1)
長さ124cm、幅66cm、深さ10cmの大型トレイに、宮城県登米市の除草剤不使用水田から採取した雑草種子を含んだ土壌(灰色低地土)を、土層の厚さが2cmとなるように均平に充填し、その後に水深が3cmとなるように湛水して、実施例1の水田(以下簡易水田という。)とした。該簡易水田を屋外に置き、稲苗を植えない裸地で供試した。
【0047】
前記除草ロボットを、前記簡易水田に毎日1回午前9時から40秒間駆動させ、20日間継続した。該除草ロボットの駆動速度は、8m/minとし、前記クランク振動式撹拌装置の土壌撹拌深度を、深さ5mmとなるように設定した。前記除草ロボットは、トレイ壁面に接触すると方向を変換し、前記40秒の間に前記簡易水田全面をカバーした。
【0048】
撹拌開始の翌日以降、撹拌直前の水の混濁持続状態、及び撹拌20日後における雑草の発生量を測定した。水の混濁状態は目視により、その都度5cm四方の白色板を、水深3cmの土壌表面に設置して、水の混濁が見られず透明で白色板を鮮明に確認できる場合を0、水の混濁が強く白色板を全く確認できない場合を3とし、その間の、やや混濁を1、混濁中を2とする4区分により評価し、毎日の評価の平均を示した。又、雑草の発生量は試験終了後に、引き抜き法により雑草個体数を測定し、平米当り本数に換算した。結果を表1に示す。
【0049】
(比較例1)
比較として、実施例と同様に設定した簡易水田において、何も手を加えない区(無処理区)と、前記除草ロボットにおいて、回転反発式撹拌装置を取り外し、クランク振動式撹拌装置の撹拌ブレードの設定位置を実施例1より15mm高くし、表層土に触れないで水だけを撹拌した区(水のみの撹拌区)を設け、各区の水の混濁持続状態及び雑草の発生量を、実施例1と同様に測定した、無処理区に対する雑草の発生量を指数(%)で示した。結果を表1に示す。
【0050】
【表1】
【0051】
表1の結果から、本発明の除草ロボットが表層土を撹拌することにより、水の混濁状態が持続され、除草機能を発揮することが明らかとなった。
【0052】
(実施例2)
本発明の除草ロボットの水田における自立直進、旋回走行状況及び表層土撹拌効果を検証するために、静岡県函南町の10アールの水田(灰色低地土)を用いた。通常のパディハローにより代かきをした後の水田に、4条植えの田植機を用いて、条間30cm、株間17cm、1株あたりの苗数5本として、稲苗を移植した。
【0053】
前記移植から1週間経過後に、本試験を実施した。本試験実施時の水深は3〜5cmで、表層土の凹凸は概ね均平で、又稲の生育状況は草丈12cmであった。除草ロボットの撹拌装置、及び駆動速度は実施例1と同様に調整した。
【0054】
除草ロボットの水田における走行は、表層土の多少の凹凸に対して支障なく、スムーズに走行した。クランク振動式撹拌装置の撹拌ブレードによる移植苗への損傷はなく、クランク振動式撹拌装置及び回転反発式撹拌装置による表層土の撹拌状況は、目視観察による水の混濁状態により判断したが、実際の水田においても有効に撹拌することが確認できた。
【0055】
左右のタッチセンサーによる稲株の感知は良好で、条間の自立直進走行を確保した。又中央のタッチセンサーは、水田の縦長方向に移植された条と直角に交差する枕地に移植された稲株を感知し、隣接する条間への旋回走行を確保し、水田における本除草ロボットの全面の走行が認められた。
【0056】
この結果から、本発明の除草ロボットは、条間の両側に移植された稲株及び前方の稲株を感知して、自立による直進及び旋回走行機能を有することが明らかとなった。
【産業上の利用可能性】
【0057】
本発明のロボットが水田において駆動することにより、簡易且つ経済的に水田雑草の防除を可能となし、除草剤等の使用を抑制し、生態系の維持にも寄与する。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態を示すロボットの外観概略図である。
【図2】ボディの構造を示す模式図である。
【図3】履帯式走行装置を用いた駆動装置の構造を示す模式図である。
【図4】センサー装置の構造を示す模式図である。
【図5】振動式撹拌装置の構造を示す模式図である。
【図6】回転式撹拌装置の構造を示す模式図である。
【図7】回転反発式撹拌装置の構造を示す模式図である。
【図8】本発明の実施例に用いた除草ロボットを示す斜視図である。
【符号の説明】
【0059】
1 除草ロボット
10 ロボットのボディ
11 ボディ本体
13 支持ステイ
15 シャーシ
17 ロードホイールの軸受け
20 駆動装置
21 モータ
23 ギヤーボックス
25 動力シャフト
26 スプロケットホイール
27 ロードホイール
29 キャタピラ
30 センサー装置
31 センサー
33 センサーステイ
35 マイコン
40 振動式撹拌装置
41 支持板
42 モータ
43 ギヤーボックス
44 動力シャフト
45 クランク
46 クランクアーム
47 リンクロッド
48 ブレードステイ
49 振動式撹拌装置撹拌ブレード
50 回転式撹拌装置
51 転車軸受けステイ
52 ボディ装着部
53 ブレード固定車輪
55 回転式撹拌装置撹拌ブレード
60 回転反発式撹拌装置
61 車輪軸受けステイ
62 ボディ装着部
63 車輪
65 車輪軸兼撹拌ブレードステイ
67 反発発生固定棒
68 回転反発式撹拌装置撹拌ブレード
【特許請求の範囲】
【請求項1】
ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボット。
【請求項2】
前記左右に設けられた駆動装置が、左右独立に駆動し、前記左側センサーが障害物を感知すると右側駆動装置が停止し、前記右側センサーが障害物を感知すると左側駆動装置が停止して障害物を避けて直進し、中央センサーが障害物を感知すると左又は右側のいずれかの駆動装置が停止して進行方向を反転させる請求項1に記載の除草ロボット。
【請求項3】
前記進行方向の反転は、右反転と左反転とが交互に行われる請求項2に記載の除草ロボット。
【請求項4】
前記センサーがタッチセンサー及び/又は光センサーである請求項1乃至請求項3のいずれかに記載の除草ロボット。
【請求項5】
前記撹拌装置が、クランクの揺動により上下前後に振動する撹拌ブレードからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項6】
前記撹拌装置が、回転軸に取り付けられた回転する撹拌ブレードからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項7】
前記撹拌装置が、回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項8】
請求項5、請求項6、及び請求項7に記載の撹拌装置のいずれか2種以上を備えた請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項1】
ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボット。
【請求項2】
前記左右に設けられた駆動装置が、左右独立に駆動し、前記左側センサーが障害物を感知すると右側駆動装置が停止し、前記右側センサーが障害物を感知すると左側駆動装置が停止して障害物を避けて直進し、中央センサーが障害物を感知すると左又は右側のいずれかの駆動装置が停止して進行方向を反転させる請求項1に記載の除草ロボット。
【請求項3】
前記進行方向の反転は、右反転と左反転とが交互に行われる請求項2に記載の除草ロボット。
【請求項4】
前記センサーがタッチセンサー及び/又は光センサーである請求項1乃至請求項3のいずれかに記載の除草ロボット。
【請求項5】
前記撹拌装置が、クランクの揺動により上下前後に振動する撹拌ブレードからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項6】
前記撹拌装置が、回転軸に取り付けられた回転する撹拌ブレードからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項7】
前記撹拌装置が、回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる請求項1乃至請求項4のいずれかに記載の除草ロボット。
【請求項8】
請求項5、請求項6、及び請求項7に記載の撹拌装置のいずれか2種以上を備えた請求項1乃至請求項4のいずれかに記載の除草ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−129910(P2007−129910A)
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願番号】特願2005−323096(P2005−323096)
【出願日】平成17年11月8日(2005.11.8)
【出願人】(503324003)
【Fターム(参考)】
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願日】平成17年11月8日(2005.11.8)
【出願人】(503324003)
【Fターム(参考)】
[ Back to top ]