
Fターム[2B043EB16]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの構成 (119) | 光センサ (6)
Fターム[2B043EB16]に分類される特許
1 - 6 / 6
移動作業機の自動操縦装置
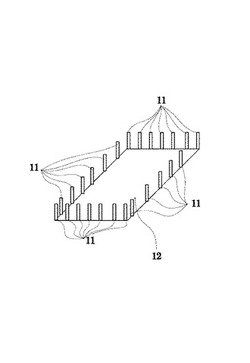
【課題】移動作業機の例として、稲刈り機やトラクターなどが挙げられるが、これらの移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】レーザー光の発信機能及び受信機能を有し、目標物の方向及び距離を検出する測定装置を備えた移動作業機があって、移動作業機の作業領域の周囲に反射材を有する複数の案内支柱を設置し、案内支柱を目標物として測定装置の検出した情報を基に移動作業機の進路方向及び移動距離を演算する演算装置と、演算装置の結果を基に移動作業機の操縦装置を操作する制御装置を備えることにより、案内支柱に沿って移動作業機が自動で作業を行うことを可能にした。
(もっと読む)
移動車両の直進誘導システム

【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 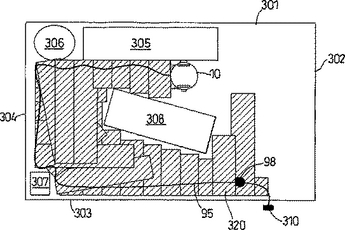 (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]