
Fターム[2B043EB22]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの配置又は取付け (104) | 車両本体又は作業機 (102)
Fターム[2B043EB22]の下位に属するFターム
Fターム[2B043EB22]に分類される特許
1 - 20 / 60
乗用管理機
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
苗移植機

【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
移植機
【課題】制御部による線引きマーカの制御モードに、前記植付作業機の昇降動作毎に左右の線引きマーカの内何れの線引きマーカを振り出すかを交互に切り換える自動モードを有した移植機において、同方向の線引きマーカを振り出したい植付行程が連続する際に、各行程間の移植機の操作の煩雑さを軽減する。
【解決手段】制御部34による線引きマーカ16の制御モードに植付作業機11の昇降動作毎に左右の線引きマーカ16の内何れの線引きマーカ16を振り出すかを交互に切り換える自動モードを有した移植機において、制御部34に、自動モードと、植付作業機11の下降に伴って左右の線引きマーカ16の内任意の一方の線引きマーカ16のみを振り出す片落ちモードと、に切換えるマーカモード設定手段34cを備える。
自動モード、及び片落ちモードにおいて、線引きマーカ16の振出方向を人為的に選択切換え可能な振出方向選択手段34dを備える。
(もっと読む)
農用作業車
【課題】防除散布装置及び薬液タンクを備えた農用作業車において、薬液タンクを搭載したままでリヤアクスルケースのオイル交換をできるようにする。
【解決手段】防除散布装置11及び薬液タンク9を備えた農用作業車において、走行車体2の後側部には後輪への伝動装置を内装しているリヤアクスルケース36を左右方向に沿わせて配設し、リヤアクスルケース36の左右両側部に左右後輪ファイナルケース41,41を取り付け、左右後輪ファイナルケース41,41の下端部に左右後輪4,4を支架する。リヤアクスルケース36の左右外側端部のいずれか一方に給油口43を設けるにあたり、走行車体2の後部に搭載している薬液タンク9よりも平面視で左右外側に突出している部位に給油口43を設ける。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
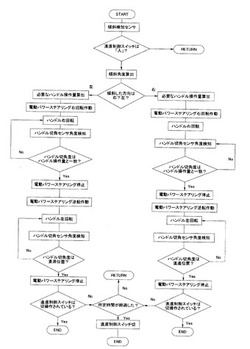
茶園管理機
【目的】 本発明は、茶畝を跨いで走行し、該走行方向を自動操舵することができ、特に、感知機構を固定状として、後進も良好にできるとともに、簡易な構成にできること。
【構成】 茶畝90を跨いだ前側門型フレーム2A及び後側門型フレーム2Bの左右下端に走行装置1,1を備え、茶畝に沿って作業を行う茶園管理機におけること。前側門型フレーム2Aの対向する内側に、平面的に見て左右茶畝側面91,91に接触しつつ中央箇所が茶畝90側に膨出する弧状感知板5と、この内部に設けられた圧力センサとを有する前進用茶樹感知手段Aが備えられていること。左右の弧状感知板5,5に加わる茶畝側面91,91からの接触圧力を測定して、左右それぞれの接触圧力が均等となるよう自動走行制御部Cにて制御して茶畝90に沿って前進自動走行するようにしてなること。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
移動作業機の自動操縦装置
【課題】移動作業機の例として、稲刈り機やトラクターなどが挙げられるが、これらの移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】レーザー光の発信機能及び受信機能を有し、目標物の方向及び距離を検出する測定装置を備えた移動作業機があって、移動作業機の作業領域の周囲に反射材を有する複数の案内支柱を設置し、案内支柱を目標物として測定装置の検出した情報を基に移動作業機の進路方向及び移動距離を演算する演算装置と、演算装置の結果を基に移動作業機の操縦装置を操作する制御装置を備えることにより、案内支柱に沿って移動作業機が自動で作業を行うことを可能にした。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、旋回時の苗植え付けなどの諸作動を自動的に行わせることができるようにすることである。
【解決手段】 機体上に設けたエンジンと、機体の進行方向に向かって左右に設けた左右前輪及び左右後輪と、該左右前輪を操向操作する操向操作具と、左右後輪のそれぞれの伝動軸に設けたエンジン駆動力を伝達・非伝達するクラッチと、操向操作具に連動して前記左右いずれかのクラッチを作動させる連動ロッド(180,180)とを備えた走行車両を設け、該走行車両には昇降用リンク装置を介して苗植付装置を装着した乗用型田植機において、操向操作具による操向角度の検出により旋回中であると判断すると、後輪の伝動軸の回転数を検出し、該回転数が第一の設定値を超えると苗植付装置を下降し、前記回転数が第二の設定値を超えると苗植付装置を作動させる制御装置を設けた。
(もっと読む)
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、円滑な旋回走行を確保するとともに、作業部の下降および再稼動の位置ずれを抑えて作業精度を確保することができる作業車両を提供する。
【解決手段】作業車両は、前輪10の操舵開始により、旋回内側後輪の回転距離のカウント開始、作業部4の停止、旋回内側後輪11のサイドクラッチ切、同後輪11の回転距離nに基づく設定値N2対応の作業部4の再稼動までの一連の旋回連動制御をする制御装置163を備えて構成され、この旋回連動制御は、内側サイドクラッチの断続動作によって旋回内側の後輪11に外側と同速の走行動力を間欠的に伝動する内側間欠伝動制御に切替え可能に構成し、この内側間欠伝動制御への切替えと対応して設定値N2を小さくする補正を行うようにしたものである。
(もっと読む)
作業車の最高速度制御機構
【課題】変速アクチュエータを駆動制御して移動速度を変更する構成において、最高移動速度を制限する最高速度設定器を備えることにより、操作性および走行性の良い作業車の最高速度制御機構を提供する。
【解決手段】エンジン5が搭載された走行機体3と、無段変速装置と、変速ペダル16(変速操作具)と、変速ペダル(変速操作具)の操作量に基づいて無段変速装置を変速制御する変速アクチュエータと、を備えた田植機1において、変速ペダル(変速操作具)を最大に操作したときの最高移動速度を制限する最高速度設定器を設け、路上走行または走行機体の傾動によって、最高移動速度を制限可能に構成した田植機(作業車)の最高速度制御機構である。
(もっと読む)
1 - 20 / 60
[ Back to top ]