
Fターム[2B043ED03]の内容
農業機械一般(操向) (6,001) | 制御対象 (576) | 操向制御 (228) | 操舵方向、位相又は操舵比 (16)
Fターム[2B043ED03]に分類される特許
1 - 16 / 16
防除作業機

【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
旋回連動制御式の作業車両

【課題】圃場の状況や走行の状況その他の変動によって対地作業装置の再稼動前に、機体の旋回位置の修正等の異常対応操作が必要なとなった場合に、オートダウン制御の解除等の煩わしい操作を強いられることなく、異常状況の対応が可能となる旋回連動制御式の作業車両を提供する。
【解決手段】旋回連動制御式の作業車両は、作業用高さと旋回用高さに切替え可能に装荷した対地作業装置(R)と、この対地作業装置(R)について機体の旋回開始と対応して旋回用高さに切替えるオートリフト制御および旋回終了と対応して作業用高さに切替えるオートダウン制御を行う制御部(21)とを備えて構成され、上記制御部(21)は、旋回開始後における機体の位置が対地作業の所定の開始位置の範囲内であって、同じく機体の走行車速が所定速度以上である場合に限り、上記オートダウン制御を実施するものである。
(もっと読む)
作業車両の操縦装置
【課題】操向レバーの旋回操作を制御装置に入力するポジションセンサの故障をいち早く検出して警報を出したり旋回を中止することで安全性を高める。
【解決手段】操向レバー(1)の左右傾倒角度を検出するポジションセンサ(2)と、該ポジションセンサ(2)とは別に操向レバー(1)の左右傾倒状態を検出する左右の旋回スイッチ(3a,3b)を設け、前記ポジションセンサ(2)と旋回スイッチ(3a,3b)の検出値が一致しない場合を故障と判断し、警報或いは走行停止を実行する構成とした。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
作業車
【課題】運転者に違和感を与えることなく、無理なく走行車体を自動操向することができ、農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】作業車に、ステアリングハンドル6に連結されたハンドル操作軸6aによる第1操作変位と、自動操向制御量に基づいて駆動する駆動軸30aによる第2操作変位とを入力操作変位として入力するとともに、第1操作変位と第2操作変位の間の差動変位を出力操作変位としてステアリング装置12の入力軸18aに出力するステアリング差動機構20を備える。
(もっと読む)
コンバイン
【課題】デバイダの位置調整を行うための操作を簡潔にして、操作性を向上させたコンバインを提供する。
【解決手段】走行機体2の前方に、複数のデバイダ21、22、23を有する刈取り部20を昇降自在に支持し、前記走行機体2を操向操作手段15により操向操作してなる、コンバイン1において、最も外側にある前記デバイダ23を、幅方向に移動自在に支持すると共にアクチュエータにより幅方向位置を調整自在とし、前記操向操作手段15の操向レバーに、前記コンバイン1の走行方向を微調整する右方向微調スイッチ16を備え、該右方向微調スイッチ16により前記アクチュエータを操作して、前記デバイダ23の位置を調整するようにした。
(もっと読む)
作業車の走行伝動構造
【課題】 作業車の走行伝動構造において、右及び左の伝動部材を伝動位置側に付勢するバネを必要以上に強いものに設定しなくても、右及び左の伝動部材を伝動位置に保持することができるようにように構成する。
【解決手段】 シフト軸47が中立位置(直進位置)にスライド操作されると、右及び左の操作部材51,52により右及び左の伝動部材28,29が伝動位置に操作され、バネ55により右及び左の操作部材51,52が右及び左の伝動部材28,29の伝動位置に保持される。シフト軸47が右旋回位置(左旋回位置)にスライド操作されると、右の操作部材51(左の操作部材52)により、右の伝動部材28(左の伝動部材29)が遮断位置に操作され、右の操作部材51(左の操作部材52)を介してバネ55が左の操作部材52(右の操作部材51)に押圧されて、左の操作部材52(右の操作部材51)が左の伝動部材29(右の伝動部材28)の伝動位置に保持される。
(もっと読む)
作業機の操向構造
【課題】 ステアリング操作具の操作に応じた機体旋回を行うことができるとともに、必要な時にのみ、より小回りの旋回を随意に行うことができる、操作性に優れた操向構造を提供する。
【解決手段】 ステアリング操作具72を操作することで左右のクローラ走行装置1に速度差を与えて、ステアリング操作具72が操作された方向に対応して機体を旋回させるように構成した作業機の操向構造において、復帰型の旋回モード変更操作具75を備え、この旋回モード変更操作具75を操作している間だけ、ステアリング操作具72の左右方向の操作量に応じて設定された左右のクローラ走行装置1の速度比を変更して旋回機能を高める旋回モードとなるように構成してある。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
移植機
【課題】次回の旋回方向を正確に判断すると共に、判断した旋回方向に対応しない左右車輪の回転差を無視し、旋回開始タイミングの誤認を防止する。
【解決手段】植付部3から左右外側方に選択的に振り出され、次植付行程に走行基準線を引くマーカ9L、9Rと、走行機体1の左後輪回転及び右後輪回転に基づいて走行機体1の旋回を判断する制御装置24とを備えた移植機において、前記制御装置24は、マーカ9L、9Rの振り出し方向に基づいて次回の旋回方向を判断すると共に、判断した旋回方向に対応する左右後輪8の回転差に基づいて旋回開始を判断する。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
コンバイン
【課題】路上走行における機体の旋回に際して、オペレータの操作負荷の軽減を図りつつ、適切なタイミングで確実に方向表示手段の動作制御を可能とするコンバインを提供する。
【解決手段】コンバインは、左右の走行部1により走行可能に支持された機体と、その左右の走行部1の速度差を操向操作具11aの操作と対応して調節する旋回手段と、機体の旋回方向表示のための方向表示操作具11bによる表示操作と対応して左右いずれかの方向表示動作を開始する方向表示手段7,8とを備えて構成され、上記方向表示手段7,8には方向表示の開始と停止とを制御する制御部21を設け、この制御部21は、上記操向操作具11aの左右の操作方向を判別し、この左右の操作方向に対して方向表示が逆方向となることを条件に表示動作を停止制御するものである。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 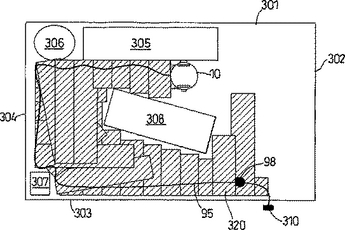 (もっと読む)
(もっと読む)
三輪型管理機
【課題】 運転者の負担を大幅に軽減することができる三輪型管理機を提供することを課題とする。
【解決手段】 前輪が2輪で、後輪が1輪で、この後輪を操舵輪とし、農作業に供する三輪型管理機において、図で、横軸は後輪の操舵角θ、縦軸は(前輪速度/後輪速度)を示す。すなわち、後輪の操舵角に基づいて前輪の回転速度を制御する。
【効果】 操舵角が大きくなるほど、走行速度が遅くなり、転倒の危険を回避することができる。運転者は旋回前に減速操作をする必要がないので、運転操作が楽になり、運転者の負担を大幅に軽減することができる。
(もっと読む)
1 - 16 / 16
[ Back to top ]