
Fターム[2B043EA37]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 圃場の状態 (78) | 障害物 (9)
Fターム[2B043EA37]に分類される特許
1 - 9 / 9
自動芝刈り機
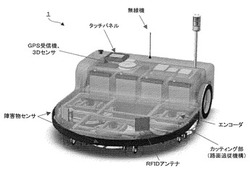
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
水田における雑草の発生防止用ロボット

【課題】稲作において農薬等を使用せずに栽培する場合の水田内の雑草の発生防止、除去に要する労力を如何にして軽減するか。
【解決手段】雑草の発生防止用攪拌機を装備した小型のエアーボートをコンピュータで制御し、障害物(稲)を避けて水田内を自由に、くまなく移動することによって、雑草の発生を防止する。障害物(稲)の認識には、CCDを使用した画像認識または、レーダーのような電波探知機を使用する。水田内をくまなく移動する為に、障害物(稲)の情報にジャイロセンサーからの位置情報を付加したデータをメモリー上にマップとして記録し、走行箇所、未走行箇所を判別する。作業時間の短縮には、複数のロボットを稼働させ、お互いが無線LANで情報を共有することにより、作業を分担する。
(もっと読む)
農薬散布用ホバークラフト
【課題】特別なテクニックを要せずに、ラダーの向きを変え推進力を加えることで容易に離岸することができる農薬散布用ホバークラフトを提供する。
【解決手段】ホバークラフト本体5と、進行方向と進行速度の他、種々の設定を所望に遠隔制御する無線信号を送信すると共に、CCDカメラ12によって映し出される船艇前方の映像信号を受信しモニタ31に現出する他、畦道や土手等の障害物に対する接近状態を感知した際、超音波センサー装置11が送信する警告信号を受信し、スピーカー30から警告音を発生させるコントローラ26の組み合わせから構成されており、農薬散布用ホバークラフト1は、ホバークラフト本体5の船首6近傍上甲板及び船尾7近傍上甲板に設けられた固定具17間にグラスファィバー製の離岸ロッド16が右舷8縁及び左舷9縁より側方に円弧状膨出して張架されていることに特徴する。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
車両
【課題】 簡単な構成で検出した物体に応じた適正な走行制御をすることができる車両を提供すること。
【解決手段】 カート路CRを走行するゴルフカート10に、前方に超音波を発信し、障害物に衝突したときに反射してくる超音波を受信することにより前方に障害物があることを検出するとともにその大きさを検出する対象物センサ31,32と、対象物センサ31,32による障害物の検出の有無および対象物センサ31,32が障害物を検出したときにはその大きさに応じてゴルフカート10の走行を制御するコントローラ25とを設けた。また、対象物センサ31,32から発信される超音波による検出範囲の幅をゴルフカート10の幅よりも少し大きくなる程度に規制するための規制部材31a,32aを対象物センサ31,32に設けた。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 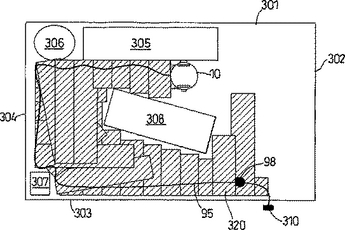 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]