
Fターム[2B043ED12]の内容
農業機械一般(操向) (6,001) | 制御対象 (576) | 車両又は作業機の制御 (233) | 車両の走行制御 (86)
Fターム[2B043ED12]に分類される特許
1 - 20 / 86
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
走行車両

【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
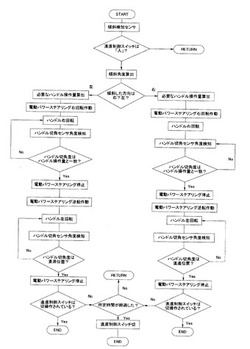
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
乗用型苗移植機
【課題】 小型の走行車体を得ると共に、安全性を向上させる。
【解決手段】 変速レバー82を支持するレバー支持アーム90を設け、変速レバー82を中立位置に戻す中立復帰アーム83を支持軸71に設け、中立復帰アーム83には上部復帰ローラ83aと下部復帰ローラ83bを設け、変速レバー82が中立位置のときは、ブレーキペダル70を操作しても上部復帰ローラ83a及び下部復帰ローラ83bがレバー支持アーム90に接当せず、変速レバー82が前進側に操作されているときは、ブレーキペダル70の操作により下部復帰ローラ83bがレバー支持アーム90の下面に接当して変速レバー82を中立位置に戻し、変速レバー82が後進側に操作されているときは、ブレーキペダル70の操作により上部復帰ローラ83aがレバー支持アーム90の上面に接当して変速レバー82を中立位置に戻す構成とした。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、耕作機構419を備えた農機300に、情報処理装置100と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、農機300は、農地4について設定されたコースとコースを走行中に耕作機構419が行う農作業とを記憶し、位置標定装置411によって標定される現在位置と記憶しているコースとに基づき、農機300の操舵機構417又は動力機構418を制御してコースに沿って自律走行するとともにその走行中に耕作機構419による農作業を行うようにする。
(もっと読む)
茶園管理機
【目的】 本発明は、茶畝を跨いで走行し、該走行方向を自動操舵することができ、特に、感知機構を固定状として、後進も良好にできるとともに、簡易な構成にできること。
【構成】 茶畝90を跨いだ前側門型フレーム2A及び後側門型フレーム2Bの左右下端に走行装置1,1を備え、茶畝に沿って作業を行う茶園管理機におけること。前側門型フレーム2Aの対向する内側に、平面的に見て左右茶畝側面91,91に接触しつつ中央箇所が茶畝90側に膨出する弧状感知板5と、この内部に設けられた圧力センサとを有する前進用茶樹感知手段Aが備えられていること。左右の弧状感知板5,5に加わる茶畝側面91,91からの接触圧力を測定して、左右それぞれの接触圧力が均等となるよう自動走行制御部Cにて制御して茶畝90に沿って前進自動走行するようにしてなること。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
乗用型田植機
【課題】機体旋回に際し、オペレータの操作負担を軽減すると共に、作業機操作への移行を円滑にする。
【解決手段】ステアリングハンドル操作に応じて機体を操舵する操舵装置12に連繋され、ステアリングハンドル操作をアシストする電動パワーステアリング装置21を備えた乗用型田植機において、操舵装置12の切れ角を検出し、操舵装置12の切れ角が所定の切れ角となったとき、当該切れ角を保持するように電動パワーステアリング装置21のアシスト力を制御する。
(もっと読む)
自動走行ルートガイドツールおよび自動走行装置
【課題】簡単に設置が可能で、かつ、安価な走行ガイドツールと、該ガイドツールを基に方向転換しながら予め決められたルートを自動走行可能な自動走行装置を提供する。
【解決手段】識別情報が記憶されたRFIDチップを内蔵した走行ルートガイドツールであって、前記走行ガイドツールの視認可能な面に走行をガイドすべき自動走行装置が方向転換する時に基準となる位置と方向を示す印が表示されているように構成した。自動走行装置は、RFIDリーダと、カメラと、カメラ画像分析部と、識別情報に対応づけられた方向情報と、画像分析の結果得られた方向情報を基に転換方向を確定する制御部と、方向転換操舵機構とを有するように構成した。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
門型たばこ栽培作業機
【課題】左右のクローラを駆動して走行する門型たばこ栽培作業機について、エンジンの回転速度の如何に関わらず、超微速で長時間安定走行させることができ、作業機の始動、停止を緩慢に、安定的に行えるように、その走行伝動機構を工夫する。
【解決手段】左右の走行フレームのいずれか一方に搭載されている動力部が互いに一体の斜板ポンプと斜板モータによる油圧減速機によるものであり、斜板ポンプをガソリンエンジンで直接駆動するようになっており、動力分配機が左右の出力スプロケットを等速で駆動する駆動手段であり、変速レバーは上記斜板ポンプを操作して上記斜板モータを変速させ、また正逆転させるものであり、上記左右のクラッチレバーは上記左右の操向クラッチを操作するものであり、左右のブレーキペダルは上記左右のブレーキを操作するものである。
(もっと読む)
1 - 20 / 86
[ Back to top ]