
Fターム[2B043ED25]の内容
農業機械一般(操向) (6,001) | 制御対象 (576) | 他の制御装置との関連 (14)
Fターム[2B043ED25]の下位に属するFターム
操向制御の優先 (9)
Fターム[2B043ED25]に分類される特許
1 - 5 / 5
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
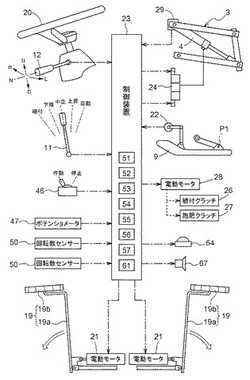
コンバイン

【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
乗用型作業機
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機を提供すること。
【解決手段】作業装置4を連結した走行車体2に走行距離を検出する走行距離検出手段205を設け、旋回時の走行距離が所定値に達したら、ブザー186が鳴って走行車体2の操向用のハンドル34を例えば90度旋回操作させる、さらに走行距離が所定値に達したら、ブザー186をもう一度鳴らして走行車体2の操向用のハンドル34を、再び例えば90度旋回操作させることができるようにすると、オペレータの操向操作の目安になり、所望の走行経路で旋回でき、8条植えなどの多条植え用の乗用型作業機であっても、前回の植付条に一部重なった状態で苗の植え付けをするおそれなく圃場での旋回が可能となる。
(もっと読む)
作業機
【課題】 本発明は、作業機において、機体の旋回状況を正確に判断できるようにすることを課題とする。
【解決手段】 エンジンからの動力を変速する伝動装置と該伝動装置からの出力で駆動する左右の車輪を備え、さらに車輪への伝動を各別に入り切りする左右のサイドクラッチを設け、旋回内側の車輪の回転数を検出に基づいて、旋回状況を判断する装置を設けた。
また、作業装置の作動を入切するクラッチを設け、該クラッチが切りになる操作に起因して旋回内側の車輪の回転数の検出を開始し、前記回転数が設定値になると前記クラッチにより作業装置を自動的に作動させる。
また、作業装置を昇降させる昇降手段を設け、旋回内側の車輪のサイドクラッチを切る操作に起因して旋回内側の車輪の回転数の検出を開始し、該回転数が所定の回転数になると昇降手段により作業装置を自動的に下降させる。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、複数の農作業動作にも対応することが可能な作業車輌を提供する。
【解決手段】 農作業中に入設定すべき制御グループAの自動制御機能110を入設定にすると共に、農作業状態に合せて選択すべき制御グループBの自動制御機能120のそれぞれを個別に入切設定し得る作業モード101と、制御グループA及び制御グループBの自動制御機能110,120を全て切設定にする走行モード100と、制御グループA及び制御グループBの自動制御機能110,120のそれぞれを個別に入切設定し得るユーザ設定モード102とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。このモード選択により、入切設定の一括操作を可能にするものでありながら、複数の農作業動作にも対応する。
(もっと読む)
1 - 5 / 5
[ Back to top ]