
Fターム[2B063BA23]の内容
移植機(田植機の接地部) (1,596) | 車輪 (132) | 切替制御 (14) | ローリング制御 (10)
Fターム[2B063BA23]の下位に属するFターム
ローリング量調節 (2)
ローリングロック装置 (1)
Fターム[2B063BA23]に分類される特許
1 - 7 / 7
苗移植機
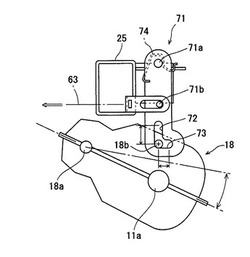
【課題】後輪のローリングアームによる左右支持レベル調整機能を確保しつつ、前端操作部材による機体操作を要する急傾斜の登行行程における機体姿勢の安定化を図ることができる苗移植機を提供する。
【解決手段】苗移植機は、前輪10と後輪11とを備えた走行車体2と、その後部で昇降可能な移植部4と、機体前端の前端操作部材6と、左右の後輪11を機体支持点18aより後方で上下動作可能に支持するローリングアーム18とを備えて構成され、上記ローリングアーム18の上下動作を許容する縦案内溝72とその支持レベルを上限位置に保持する横案内溝73とをそれぞれ形成したローリングガイド71を設け、前端操作部材6を傾動動作可能に軸支してその傾動位置で両ローリングガイド71を弾発付勢し、上限支持レベル位置に達したローリングアーム18を横案内溝73に保持する連結部材63を設けたものである。
(もっと読む)
農作業機

【課題】本発明の課題は、ローリング軸により農作業部と整地ロータとを共に左右ローリング可能にし、且つ、整地装置の支持構造並びに配置構成を強固でコンパクトに具現する。
【解決手段】昇降リンク装置の後端部に昇降する縦リンク51を備え、縦リンク51に設けた前後方向のローリング軸24を介して左右にローリングする取付フレーム52を縦リンク51の後側に設け、取付フレーム52に着脱する着脱ヒッチを介して農作業部を取付フレーム52の後側に設け、取付フレーム52に支持されて該取付フレームから後側に延びる整地装置支持フレーム54を設け、整地装置支持フレーム54に該整地支持フレームから前側に延びる上下回動アームを連結し、上下回動アームに整地フレーム56を連結して整地装置8を上下回動可能に支持し、前記整地装置支持フレーム54と整地フレーム56が機体側面視で重複して交差するように構成する。
(もっと読む)
歩行型水田作業機
【課題】歩行型水田作業機において、耕盤の小さな凹凸に沿って機体が右及び左に小さく頻繁に傾斜するような状態に加えて、耕盤の大きな凹凸に沿って機体が右及び左に大きく傾斜するような状態に対しても、適切に対応できるように構成する。
【解決手段】走行用の右及び左の車輪、機体に対する右及び左の車輪の高さに強制的に差を与えるローリング機構26、機体が田面と平行になるようにローリング機構26を作動操作するローリング操作手段31を備える。右及び左の車輪の昇降を許す融通部20をローリング機構26と右及び左の車輪との間に備え、機体に対する右及び左の車輪の高さの差を無くす方向に右及び左の車輪を付勢する付勢機構29を備える。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
乗用作業機
【課題】 従来の乗用作業機は、左右前輪及び左右後輪が各々バネにより独立して上下移動する構成である為に、機体に搭乗する操縦者や補助作業者の体重変化や機体に搭載される部材の重量変化(施肥装置付き乗用田植機であれば、苗や肥料の搭載量の変化)等の機体重量の変化により、圃場の凹凸や傾斜に対して、各車輪が上下移動して機体を水平に維持しようとする働きが変動し、常に適正な機体姿勢を維持することは困難であった。
【解決手段】 機体前部に操向操作される左右前輪(10)を設け、機体後部に左右後輪を設けた乗用作業機において、左右前輪(10)は各々弾性部材(81a)を介して機体に懸架すると共に、機体上にエンジンを搭載し、エンジンの一側にマフラーを配置し、マフラーを配置した側とエンジンの反対側からマフラー側に向けてエンジンの冷却風が流れる構成とした乗用作業機とした。
(もっと読む)
乗用型苗植機
【課題】実際の田植作業では昇降制御のセンサーである整地フロートはローリング制御による苗植装置の傾斜修正作動にて泥面から押上げ力を受けて上動する為に、苗植装置は上昇作動してしまい、苗の植付け深さが浅くなって苗が浅植えになったり植付けられなかったりする事態が発生した。
【解決手段】苗植装置25に設けた接地センサー32の接地圧が所定値に維持されるように昇降駆動装置28を制御する昇降制御手段と、苗植装置25の左右傾斜角度を検出する傾斜センサー64の検出値が所定値に維持されるようにローリング駆動装置60を制御するローリング制御手段とを備え、該ローリング制御手段によるローリング駆動装置60の作動中または作動中及び作動後の所定時間は昇降制御手段による苗植装置25を昇降駆動装置28にて上昇作動させる制御を牽制する制御装置51を設けた乗用型苗植機。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
1 - 7 / 7
[ Back to top ]