
Fターム[2B063CA21]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | 切替制御 (10)
Fターム[2B063CA21]の下位に属するFターム
自動制御と手動制御の切替
流量制御
弁の作動範囲制限及び中立位置の設定
弁のロック体
操作レバーによる弁の制御
ワイヤー (4)
ロータリーバルブ
Fターム[2B063CA21]に分類される特許
1 - 6 / 6
水田作業機
【課題】既植苗の存在箇所や既播種位置に近い側における整地用ロータの端部で、多量の泥押しや泥波が発生する可能性を低減させる。
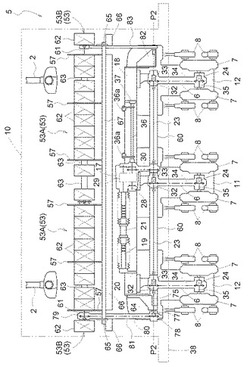
【解決手段】左右方向での端部側に位置する端部ロータ部分53Bと、左右方向での中央側に位置する中央部ロータ部分53Aとを備えて構成された整地用ロータ53の端部ロータ部分53Bを、中央部ロータ部分53Aの駆動速度よりも低速での回転が可能な自由回転状態、または田面から離れた非整地状態に切換可能に構成してある。
(もっと読む)
水田作業機

【課題】整地装置の泥滞留に起因した整地装置による泥水の押し出しを効果的に抑制することができる水田作業機を提供する。
【解決手段】整地装置40を整地作用する整地作用状態と整地装置40における泥滞留の解消を図る泥滞留解消状態とに切り換え操作する切り換え手段97,98と、整地装置40における泥滞留の発生を検出する泥滞留検出手段92,93とを設けてある。泥滞留検出手段92,93が検出作動すると、整地装置40が泥滞留解消状態に切り換え操作されるように泥滞留検出手段92,93による検出情報を基に切り換え手段97,98を自動的に操作する制御手段96を設けてある。
(もっと読む)
移植機
【課題】新たな油圧バルブや操作手段を設けることなく植付装置の下降速度を遅くすることを可能とした移植機を提供する。
【解決手段】乗用田植機1は、油圧モードとされた際、植付装置30を昇降駆動する際の通常の速度より遅い速度によって植付装置30を下降させる遅速制御位置48と、油圧シリンダ21の下降を停止させる停止位置49とを設けた油圧感度調節ダイヤル16を備えので、油圧モードに切換えられた際、即ちメンテナンス時等の際にも、新たに操作手段を設けることなく、通常よりも遅い下降速度によって植付装置30を下降させることができる。
(もっと読む)
移植機
【課題】整地作業機の高さ調節に関し、オペレータの操作負担を軽減すると共に、整地作業機の高さを適正化して整地作業精度を向上させる。
【解決手段】走行機体1に昇降自在に連結され、苗の植付けを行う植付作業機10と、植付作業機10の前部に昇降自在に連結され、植付作業機10の前方で整地を行う整地作業機17と、整地作業機17を植付作業機10に対して昇降させるロータ昇降モータ52と、整地作業機17の高さを設定操作するロータ高さ設定ダイヤル54と、ロータ高さ設定ダイヤル54の操作に応じたロータ昇降モータ52の駆動制御にもとづいて整地作業機17の高さを制御する制御部21とを備える乗用田植機において、制御部21は、ロータ高さ設定ダイヤル54とは異なる所定の操作具操作に応じて、整地作業機17の高さを所定方向に微調節する。
(もっと読む)
作業車両
【課題】簡単な構成で作業車両の姿勢変化を抑制する。
【解決手段】左右一対の前輪(6,6)及び後輪(7,7)を設けた四輪構成の作業車両であって、これら左右前輪(6,6)及び左右後輪(7,7)をそれぞれ上下動可能に支持する上下動支持機構を設け、これらの対角線上に配置されている左右前輪(6,6)、左右後輪(7,7)が互いに相反する方向に上下動させる上下動連繋手段(35,37,38)を設ける。
前記構成によると、上下動支持機構により上下動自在に支持されている左右前輪(6,6)のいずれかが上下動すると、この対角線上に配置されている左右後輪(7,7)のいずれかが上下動連繋手段(35,37,38)により互いに相反する方向に上下動し、作業車両の姿勢変化を抑えることができる。
(もっと読む)
水田作業機
【課題】 接地フロート12が設定姿勢になるように水田作業装置10を昇降制御するものでありながら、自走車体や水田作業装置の走行速度や姿勢の変化にかかわらず、接地フロート12が田面に対して適切な姿勢で接地するように、かつ、ハンチングが発生しにくいようにする。
【解決手段】 昇降制御手段55は、フロート角センサ50による検出情報を基に設定制御目標フロート角を設定し、フロート角センサ50による検出フロート角が設定制御目標フロート角になるようにリフトシリダ6を操作する。昇降制御手段55は、車速感応モードになると、車速センサ52による検出車速が高速であるほど制御感度がより鈍感になるように制御感度を補正する。昇降制御手段55は、傾斜角補正モードになると、自走車体の傾斜角センサ51による検出前上がり傾斜角が設定値より大であるほど設定制御目標フロート角に対応するフロート姿勢が前下がり方向になった状態の設定制御目標フロート角を設定する。
(もっと読む)
1 - 6 / 6
[ Back to top ]