
Fターム[2B063CA35]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | 複数の検知手段を有するもの (5)
Fターム[2B063CA35]に分類される特許
1 - 5 / 5
苗移植機
【課題】圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行え、苗の植付精度が良くなる対地作業装置付きの苗移植機を提供すること。
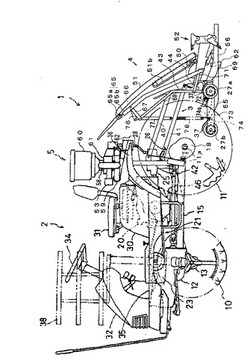
【解決手段】車体2の後部に昇降自在に設けた複数条分の苗植付具52aを有する苗植付部4に対して昇降自在に設けた地面を整地するロータ27a,bと該ロータの回転軸と同軸上に設けたカバー37を有し、ハンドルの旋回開始時からの走行距離を車輪(旋回内側に後輪)の回転数センサ7で検出した回転数に基づき測定し、走行距離が所定値に達すると自動的に苗植付部4による圃場への苗植付けを開始する自動植付開始モードを設定し、該モード作動中にはロータ27a,bを接地させないようにロータカバー37の後方部37bを苗植付装置4に固定支持された上方部37aの後端部を支点として回動させて後方部37bの後端部を圃場に接地させて、該後端部で苗植付部4を浮かせて圃場の凹凸を均平化させる。
(もっと読む)
苗移植機

【課題】従来から公知の装置は、フロートの前側に軸架された整地ローターが、強制回転駆動されて整地作用を行う構成になっているが、それ以外の作用は期待されていない。本件出願は、前記整地ローターに本来の整地機能に加えて、土壌の硬軟度を検出する検出手段として利用するものである。
【解決手段】走行車体の後部に、制御手段(4)を装備した苗植付装置を連結して、接地センサ(5)の検出値に基づいて植付深さを設定位置に保持するために昇降制御作用を行う構成としている。前記苗植付装置の下側に設けたセンターフロート(6)の前側に、独立して上下動する中央整地作業装置(7)を設け、前記制御手段(4)は、前記中央整地作業装置(7)が上下動により検出した土壌の硬軟度に基づいて昇降制御の感度を補正する構成とした苗移植機としている。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
水田作業機
【課題】 接地フロート12が設定姿勢になるように水田作業装置10を昇降制御するものでありながら、自走車体や水田作業装置の走行速度や姿勢の変化にかかわらず、接地フロート12が田面に対して適切な姿勢で接地するように、かつ、ハンチングが発生しにくいようにする。
【解決手段】 昇降制御手段55は、フロート角センサ50による検出情報を基に設定制御目標フロート角を設定し、フロート角センサ50による検出フロート角が設定制御目標フロート角になるようにリフトシリダ6を操作する。昇降制御手段55は、車速感応モードになると、車速センサ52による検出車速が高速であるほど制御感度がより鈍感になるように制御感度を補正する。昇降制御手段55は、傾斜角補正モードになると、自走車体の傾斜角センサ51による検出前上がり傾斜角が設定値より大であるほど設定制御目標フロート角に対応するフロート姿勢が前下がり方向になった状態の設定制御目標フロート角を設定する。
(もっと読む)
1 - 5 / 5
[ Back to top ]