
Fターム[2B075JA12]の内容
収穫機本体(特定作物用) (1,318) | 作業台、台車 (48) | 低所用作業車 (16) | 走行部、機枠 (5)
Fターム[2B075JA12]に分類される特許
1 - 5 / 5
果実収穫装置
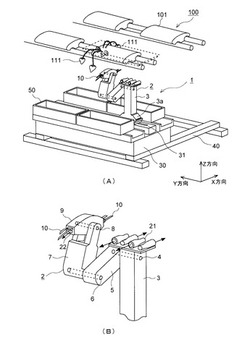
【課題】作業効率が高く且つ果実を傷めずに収穫可能な果実収穫装置を提供する。
【解決手段】栽培空間に複数の対象果実が吊下している果実の収穫装置1において、収穫装置は、鉛直方向に延設された支柱3にアーム機構が取り付けられ、アーム機構の先端に設けられた把持ハンド10で果実を把持して収穫するマニピュレータ2を備えており、アーム機構は、支柱3に第1の軸4を介して取り付けられ鉛直面内で屈曲する第1のアーム部5と、第1のアーム部5に第2の軸6を介して取り付けられ鉛直面内で屈曲する第2のアーム部7と、第2のアーム部7に第3の軸8を介して取り付けられ鉛直面内で屈曲する第3のアーム部9とを有する3軸のアーム機構であり、第3のアーム部9の先端に取り付けられた把持ハンド10が水平に維持されるように該第3のアーム部が駆動されるとともに、把持ハンド10と果実111との高さ方向及び奥行き方向の位置を合わせるように第1のアーム5部及び第2のアーム部7が駆動される構成とする。
(もっと読む)
棚下電動作業車

【課題】スイッチの誤操作の発生を防止できると共に、スイッチの耐久性を向上することができる棚下電動作業車を提供すること。
【解決手段】高さ位置を調整可能に設けられた座席11及び床部12が載置された基台10と、基台10の前側で且つ左右に配設され、正逆の両方向に回転可能な電動モータによってそれぞれが独立して駆動される一対の走行駆動機構20A、20Bと、基台10の後側で且つ左右方向の中央部に配設され、一対の走行駆動機構20A、20Bによる走行に伴って従動して作動する後輪40とを備え、一対の走行駆動機構20A、20Bのそれぞれが、足で踏むことによってスイッチの入り切りがされて操作されるように、床部12の上面に設けられた一対のスイッチ操作部30A、30Bが、正回転用の押しボタン31、逆回転用の押しボタン32、及び両者の中間部に設けられた突起部33を有する。
(もっと読む)
農業用ロボット装置
【課題】ハウスの構造を変更することなく、ハウス内で連続的に長時間運用ができる農業用ロボットを提供する。
【解決手段】直線方向に移動が可能な移動機構を具備した台車4に、電力により稼働する作業機構5と、該移動機構及び該作業機構に電力を供給するための電源ケーブル6を収納した電源ドラム7と、前記電源ケーブルを前記電源ドラムから繰り出しまたは巻き取り動作と前記移動機構の動作を連動して移動を行う制御装置8とを搭載した農業用ロボットAと、該農業用ロボットを搭載して、上記台車の直線方向と交差する方向に往復動する移動台車Bとを連接した農業用ロボット装置である。
(もっと読む)
作業用台車
【課題】楽な姿勢で作業を行いながら、作業性の低下を抑止することができる作業用台車を提供する。
【解決手段】作物が栽培された畝を跨ぐように形成されたフレーム部3の一方の畝間路側に、前後に位置するように配置された第1車輪部210および第2車輪部220と、作業者が座って作業する第1座部41および第2座部42とが設けられ、フレーム部3の他方の畝間路側に、側輪部230が設けられ、第1車輪部210および第2車輪部220は進行方向に向かって外側に傾斜させてフレーム部3に設けられている。またフレーム部3は、第1車輪部210および第2車輪部220と側輪部230との間隔が調整可能な幅調整部35が設けられている。
(もっと読む)
収穫装置
【課題】安全でかつ軽量で、収穫物の根切りを容易に作業することができ、根切り位置を容易に一定にすることができる根切り機を提供することである。
【解決手段】2つの車輪23を有するフレーム20に保持部10が固設され、フレーム20の側面部に根切り刃30が設けられる。根切り刃30は、刃先31が水平面においてフレーム20の側面部からフレーム20の進行方向と垂直な方向に延在するととともに、鉛直面においてフレーム20の進行方向に対して下方向に湾曲したR形状を有するものである。
(もっと読む)
1 - 5 / 5
[ Back to top ]