
Fターム[2B076BB08]の内容
収穫機本体(機枠、駆動) (12,770) | 機体構造 (442) | 機台に対する機体の位置変化 (105) | その他の位置変更 (33)
Fターム[2B076BB08]に分類される特許
1 - 20 / 33
コンバイン
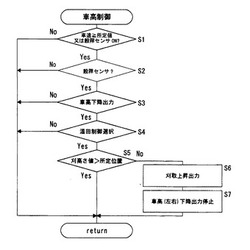
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
コンバイン

【課題】搬送車輌への積み降ろし作業などが容易なコンバインを提供する。
【解決手段】作業切替ダイヤルが積載位置に切替えられると、制御部は積載モードへと切替る(タイミングl)。積載モードになると制御部は、エンジンの回転速度を、作業時に使用可能な回転速度域よりも低い設定低回転速度に設定すると共に、車高を最上げ位置に設定する。また、制御部は、前処理部を最下降位置に設定すると共に、ナローガイドも作業位置から収納位置へと切替える。
(もっと読む)
クローラ走行装置
【課題】本発明は、部品点数を削減できるようにしながら、急旋回のときに、補助リンクを設けていた場合のように融通部に大きな曲げ力が作用しないクローラ走行装置を提供することを目的とする。
【解決手段】機体フレーム5に左右それぞれ横軸心Xa,Xb回りに揺動自在に支持された前側の揺動アーム28aの揺動端部と後側の揺動アーム28bの揺動端部とをトラックフレーム22に連結して、機体フレーム5に対して揺動アーム28a,28bを介してトラックフレーム22を昇降自在に支持してあるクローラ走行装置において、前側の揺動アーム28a及び後側の揺動アーム28bのうち、一方の揺動アーム28bの揺動端部を前後方向に摺動自在な案内部84を介してトラックフレーム22に連結してある。
(もっと読む)
作業機
【課題】作業部を備える作業機において、容易かつ効率的な操作で作業部及び機体を昇降させることができるとともに、作業部を用いた作業に速やかに移行できる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの前進操作が検出されている場合において、刈取部が所定位置より上昇側にある状態で、刈取部昇降スイッチの上昇操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。また、制御部は、機体上昇制御が行われた後に、刈取部昇降スイッチの下降操作が検出されると、機体の高さを予め設定される手動設定位置まで下降させる機体下降制御を行う。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
コンバイン
【課題】構造が簡便でかつ作業性を向上させた対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】対地高さ検出手段は、車幅方向に所定幅を有する対地高さ検出用ソリ体36R、36Lを接地センサーとして刈取部4の対地高さを検出する。対地高さ検出用ソリ体36R、36Lは、それぞれ右主軸40Rとソリ体用枢支パイプ40Lに連設されており、右主軸40Rとソリ体用枢支パイプ40Lは内外層の同軸構成とされている。また、対地高さ検出用ソリ体36R、36Lの揺動を検出するための部材は、すべて刈取部4の一側に配設される。
(もっと読む)
車両及び車両の運転方法
本発明は、(i)アンダーキャリッジ(20)と、前記アンダーキャリッジ(20)に対して垂直軸(90)の周りを回転可能に配設されたアッパーキャリッジ(30)、及び(ii)前記アッパーキャリッジ(30)に対して水平軸(80)の周りを回動可能に配設されたてこ手段(40)の少なくとも一方を備えた車両(10)であって、前記車両(10)の傾斜運動に対して少なくとも1つの安定性基準を監視するためのセンサシステム(100)が提供され、制御装置(150)が前記センサシステム(100)に連結されて、前記少なくとも1つの安定性基準に応じて前記車両(10)を安定化させるための動作を自動的に開始及び/又は実行する、車両(10)に関する。これにより車両の予期せぬ傾斜リスクが軽減される。 (もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
作業機
【課題】 後進時に機体を上昇させて機体の地面への接触を回避するとともに、後進後に再び前進する場合にはオペレータの手間を要することなく元の作業を素早く再開できる作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出されたときに、機体を上昇させる制御及び機体の後進制御を行う。その後に前進操作が行われ、機体が所定距離以上前進すると(S302)、制御部は、機体を上昇させる前の高さに機体を戻す制御を行う(S303〜S305)。
(もっと読む)
作業機
【課題】 作業場所の状況に応じて効率的に機体の昇降制御を行う作業機を提供する。
【解決手段】コンバイン(作業機)は、刈取部(作業部)と、この刈取部を昇降させるための刈取部昇降シリンダと、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために当該機体の左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部の制御モードは、切換スイッチにより、第1制御モードと第2制御モードとの間で切換可能である。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出された場合は、第1制御モードでは機体上昇制御及び機体の後進制御を行い、第2制御モードでは機体を上昇させずに後進制御を行う。
(もっと読む)
収穫作業車
【課題】走行機体1の左右方向の傾斜を低減できるものでありながら、走行状況又は作業条件等に適応して移動できるようにした収穫作業車を提供するものである。
【解決手段】エンジン20を搭載した走行機体1と、走行機体1を支持する左右の走行クローラ2と、操縦ハンドル11及び運転座席12を有する運転部10と、圃場の作物を収穫する収穫装置3,5と、左右の走行クローラ2の対機体支持高さを変更する左右の傾斜変更機構26とを備え、走行機体1の左右方向の傾斜角を変更するように構成してなる収穫作業車において、走行機体1に前記左右の走行クローラ2を左右方向に移動可能に連結する左右の走行部支持体29,30と、左右の走行クローラ2の轍距を変更する轍距変更機構45とを備えたものである。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、左右の走行クローラに対する走行機体の相対高さを変更調節する左右の車高調節機構と、主変速レバー13と、操向ハンドル10とを備えた走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、コントローラ170と、複数の変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、操向位置センサ117、主変速位置センサ135及び副変速位置センサ145の検出情報と、走行機体1の車高及び基準高さの関係に対応して選択された変速出力パターンに基づき、直進電動モータ151及び旋回電動モータ161を作動させて走行機体1の車速及び進行方向を調節するという変速操向制御を実行する。
(もっと読む)
コンバイン
【課題】走行機体に対して左右の走行装置をそれぞれ独立して昇降させる左右一対の走行部昇降装置を備え、走行機体の左右方向の傾斜調整を行い得るコンバインにおいて、自動制御のための傾斜角度設定をより容易に行うことができるコンバインを提供する。
【解決手段】手動操作部材470は、走行機体2を上昇させる上昇操作位置D2と、走行機体2を下降させる下降操作位置D1と、走行機体2を左側へ傾斜させる左側傾斜位置D3と、走行機体2を右側へ傾斜させる右側傾斜位置D4と、前記4つの操作位置とは異なる第5の操作位置D5とを選択的にとり得る。制御装置400は、走行機体2の左右傾斜角度が所定の設定角度となるように自動制御する自動制御モード実行時であって、設定角度として水平角以外が設定されている場合、手動操作部材470が第5の操作位置D5に操作されると、前記設定角度を水平角に変更する。
(もっと読む)
コンバインの情報表示装置
【課題】コンバインによる作業工程に沿って、状況変化の際に対応遅れを招くことなく、それぞれの的確な作業により全体としての作業性を向上することができるコンバインの情報表示装置を提供する。
【解決手段】コンバインの情報表示装置は、複数の切換用スイッチにより表示画面の切換えが可能なモニター表示部11を備え、このモニター表示部11には、少なくともエンジン負荷と穀粒貯留量と車速により作業状態を表示する通常画面21を備えたコンバインの情報表示装置において、上記モニター表示部11には、車高調節状態を表示する車高表示画面22を別途備え、所定の切換用スイッチ15の操作によって上記通常画面21から車高表示画面22への画面切換えを可能に構成したものである。
(もっと読む)
クローラ走行装置
【課題】下降位置から機体を上昇させる際の起動トルクを大きく確保でき、シリンダ装置を等速駆動させた際の機体の昇降速度の変化が少ないクローラ走行装置を提供する。
【解決手段】作用アーム部13Rを水平に回動させた下降状態でリンク12Rには最大負荷トルクが作用する。油圧シリンダ15による駆動アーム部14Rの回動範囲を回動軸22Rよりも上昇側(後方)に制限して、作用アーム部13Rを水平に回動させた際に油圧シリンダ15がほぼ90度の角度で駆動アーム部14Rを駆動するように、作用アーム部13Rと駆動アーム部14Rとの交差角度および油圧シリンダ15の配置を定めてある。
(もっと読む)
コンバイン
【課題】前処理部からフィードチェーンに対する穀稈の引継ぎの良いものでありながら、走行機体に対する前記前処理部の回動量を大きくでき、メンテナンス性を向上させたコンバインを提供する。
【解決手段】前処理部45を、脱穀装置7側の旋回軸を中心に走行機体3に対して横方向に開放し得るように構成した、コンバイン1において、フィードチェーン8の前記走行機体3の内側に、前記前処理部45からの穀稈を前記フィードチェーン8に受渡す際に補助をする補助搬送装置30を配置し、該補助搬送装置30を、前記フィードチェーン8と一体に移動可能に支持した。
(もっと読む)
コンバイン
【課題】刈取前処理装置から走行機体にわたる横一側部に設けられたサイドデバイダとを備えているコンバインにおいて、サイドデバイダを低コストで製作できる簡単な構造にする。
【解決手段】サイドデバイダ40は、枢着部材44を介して屈曲可能に連結された前後一対の分草杆41,42と、先端部を枢着部材44に水平回動可能に枢着し、基端部を走行機体1の横一側部に水平回動可能に枢着した中間リンク杆43とを備える。前後両分草杆41,42は、中間リンク杆43を基端部回りに水平回動させることによって、横方向外向きに張り出した作業姿勢と、刈取前処理装置3及び走行機体1に近接した収納姿勢とに姿勢変更可能に構成する。
(もっと読む)
コンバイン
【課題】走行フレーム上に泥土が堆積し、走行抵抗が増加する課題。
【解決手段】機体フレーム1の下方に、左右一対の走行フレーム6に設けた複数の転輪7と駆動輪8とアイドルローラ9の夫々の外周にクローラ10を掛け回して構成した走行装置4を設け、前記左右の走行フレーム6は、正面視において、少なくとも、その上面の断面が山型となって左右に傾斜面45を有する。前記アイドルローラ9は取付挿入部材46に取付け、該取付挿入部材46は、該取付挿入部材46の断面形状を前記走行フレーム6の断面形状に合わせて形成すると共に、前記走行フレーム6の後端に位置調節自在に挿入して取付ける。
(もっと読む)
作物収穫機
【課題】玉葱等の作物を4条ずつ効率よく収穫できるようにする。
【解決手段】2条の作物の茎葉をまとめて引き起こす茎葉引き起こし機構2と、この茎葉引き起こし機構で引き起こされた2条の茎葉を上下2箇所で挟持しながら畝から作物を引き抜いて搬送する上下引き抜き機構3.4と、この上下引き抜き機構で搬送する途中で茎葉と鱗茎とを分離する切断機構5と、走行機体6とを備え、前記走行機体は、左右一対のクローラ走行装置9と、この左右クローラ走行装置の車輪支持台10に横軸11を介して上下揺動可能に支持された機フレーム12とを有し、この機フレームに、前記茎葉引き起こし機構と引き抜き機構と切断機構とが左右一対ずつ搭載されると共に、茎葉引き起こし機構と上下引き抜き機構とクローラ走行装置とに動力を伝達するエンジン13が搭載されている。
(もっと読む)
作業車
【課題】 単独の刈取装置用のシリンダの利用の車高調節に限定されて、左右傾斜の修正は行えないという課題。
【構成】 機体フレーム1の下方に走行装置4を設ける。走行装置4は、左右の走行フレーム6をリンク機構13により機体フレーム1に対して昇降自在に設け、左右のリンク機構13の内の一方は単独のシリンダ15により前記走行フレーム6を昇降させ、他方のリンク機構13は前記一方のリンク機構13と回転軸25により連結して単独のシリンダ15により連動するようにして左右の走行フレーム6を昇降させるように構成し、前記回転軸25の中間部には左右のリンク機構13の連動を入り切りする切替機構16を設け、前記左右の走行フレーム6のうちの前記切替機構16を介して上下する他方走行フレーム6B側には、該他方走行フレーム6B側の車高を保持する保持機構35を設ける。
(もっと読む)
1 - 20 / 33
[ Back to top ]