
Fターム[2B304PC11]の内容
Fターム[2B304PC11]の下位に属するFターム
Fターム[2B304PC11]に分類される特許
1 - 7 / 7
農作業機
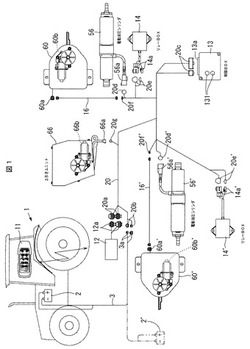
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、操作ユニット11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、農作業機に配置される制御ボックス13内の制御部133の制御により農作業機の一部をアクチュエータ56、56’により作動させる農作業機において、制御ボックス13の表面に非常動作用スイッチ131を設け、非常動作用スイッチ131をONとすると、制御部133はアクチュエータ56、56’を作動させる
(もっと読む)
作業車両

【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
農作業機の操作給電システム
【課題】トラクタに装着して農作業を行う作業機をトラクタから脱着する際に、操作及び給電のためのハーネスの取り付け、取り外しが不要となる農作業機の操作給電システムを提供することを目的とする。
【解決手段】トラクタ1に装着して農作業を行いトラクタ1と脱着可能な作業機2と、トラクタ1側に設置される送信部16と、作業機2に設置される受信部22とを有し、操作部10からの操作情報を、送信部16と受信部22の間で無線送信して作業機2側に送信し、トラクタ1に有する電源11からの電力を、送信部16と受信部22の間でワイヤレスで電力伝送して作業機2側へ送る。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
農作業機用リモコン送信装置
【課題】トラクタに装着する農作業機に備える出力機器を操作するための農作業機用リモコン送信装置で、電源確保の確実性を向上させた農作業機用リモコン送信装置を提供することを目的とする。
【解決手段】トラクタ1に装着される農作業機2に備える出力機器110を操作するために操作信号を無線により送信する農作業機用リモコン送信装置10において、操作信号を無線により送信する無線送信部11と、外部電源が接続可能な外部電源接続部10aと、外部電源接続部10aから入力される電圧を無線送信部11で使用する一定の電圧に変換する電源回路12とを有する。
(もっと読む)
農作業機用リモコン装置
【課題】電源を入れたと同時に、操作者が意図しない農作業機の動作が実行される可能性をなくすことができる農作業機用リモコン装置を提供する。
【解決手段】農作業機用リモコン装置60は、電源スイッチ210がオン状態のとき、指令信号を搬送するための電波を送信し、各指令スイッチがオンされたとき指令信号データに基づいて指令信号を電波に載せて送信する通信手段223と、各指令スイッチがオンされたとき指令信号データを記憶手段222から読み込み、指令信号データを通信手段223に送る制御手段221を備え、通信手段223は、電源スイッチ210が入れられた立ち上げ時には、各指令スイッチを操作するときに出力する電波の強度よりも小さい強度で出力する制御を行う出力制御手段226を備える。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御を、高精度に実行できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機の耕耘爪の耕耘深さを検出する耕耘深さセンサと、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記耕耘爪の耕耘深さを演算するための前記耕耘制御手段の制御ゲインを無段階に変更するための制御ゲインダイヤルを備え、前記耕耘制御手段は、前記制御ゲインを前記制御ゲインダイヤル値に基づいて変更して、前記耕耘爪の耕耘深さを、設定された耕耘深さにすべく、変更後の前記制御ゲインで制御するものである。
(もっと読む)
1 - 7 / 7
[ Back to top ]