
Fターム[2B304PC12]の内容
Fターム[2B304PC12]に分類される特許
1 - 20 / 34
移動式電動作業機
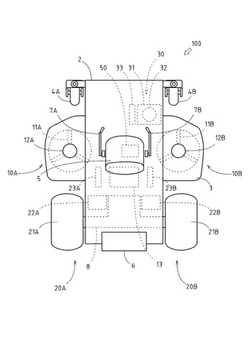
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
ロータリ耕耘機

【課題】 構成部材が少なく構造が簡単で製造費が安上がりになり、しかも支持フレームの高さ設定を容易にすることができるロータリ耕耘機を提供する。
【解決手段】 支持フレーム9には、左右一対の揺動アーム81と、接地部材7,8を支持するツールバー83とが備えられ、一方の揺動アーム81に支持フレーム9の揺動高さを示す目盛り96が前後方向に設けられ、枢支軸84の上方位置の機枠4に連動杆98の前上側が左右方向の支軸99廻りに上下揺動自在に支持され、連動杆98の後下側には、左右方向に屈曲されかつ前記一方の揺動アーム81に上側から接当される接当部101が形成され、かつ接当部101自体に又はその近辺に目盛り96と対向する指標部101aが形成され、前記指標部101aが揺動アーム81の上下揺動に連動して前記目盛り96に沿って前後に移動自在とされている。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
トラクタの作業機昇降装置
【課題】操縦席から上げ側ストッパを移動調節するだけの簡単な設定動作により、リフトアームの上方回動高さの規制を能率よく正確に行うことができるトラクタの作業機昇降装置を提供する。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
(もっと読む)
農作業機のリモコン装置
【課題】作業者に合うオフセット位置に作業部を容易に移動可能な農作業機のリモコン装置を提供する。
【解決手段】リモコン装置100は、作業部のオフセット位置を記憶する指令信号を送る作業位置記憶スイッチ101aと、農作業機の各種作動を制御する指令信号を送る指令スイッチと、各種作動を制御する指令信号データを記憶する記憶部111と、スイッチ101aや指令スイッチのオン時に指令信号データを記憶部111から読み込んで通信部112に送る制御部110を備える。制御部110は、スイッチ101aとスイッチ101bのオン時に、作業部のオフセット位置を記憶させる指令信号データを記憶部111から読み込み、その後のスイッチ101bのオン時に、作業部を現位置から記憶されるオフセット位置に移動させる指令信号データを記憶部111から読み込む指令信号データ選択部112aを有する。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
ロータリ耕耘機
【課題】上げ下げされる可動部を備えたロータリ耕耘機において、可動部を上げ下げするための電動モータの着脱の容易化を図る。
【解決手段】可動部28,9,8を上げ下げさせるための可動部操作装置33L,85,108の回転操作杆の軸芯方向一端側に、該回転操作杆を電動モータ56の動力によって回転させるべく該電動モータの出力軸62を嵌脱自在に嵌合させるための嵌合部を設けたロータリ耕耘機において、電動モータ側に、揺動自在に枢支されていて出力軸を嵌合部に嵌合させた状態で揺動させることにより可動部操作装置側に設けた抜止め部に係脱自在に係合して出力軸の嵌合部からの抜け止めをする係合部材を設け、且つ、電動モータ側と可動部操作装置側との間に、出力軸の嵌合部への嵌合動作、或いは、係合部材の抜止め部への係合動作によって電動モータの本体部分の出力軸軸芯廻りの回転を規制する回転規制手段59を備える。
(もっと読む)
ロータリ耕耘機
【課題】上げ下げされる可動部を複数備えたロータリ耕耘機において、各可動部を電動モータによって上げ下げさせるに際して、コスト低下、重量軽減、誤操作防止を図る。
【解決手段】可動部28,9,8を上げ下げさせるための可動部操作装置33L,85,108を各可動部28,9,8に対してそれぞれ設け、各可動部操作装置33L,85,108は、可動部28,9,8を上げ下げさせるべく軸芯廻りに回転操作される回転操作杆を備え、各回転操作杆の軸芯方向一端側に、該回転操作杆を電動モータ56によって回転駆動させるべく、該電動モータ56の出力軸62を嵌脱自在に嵌合させるための嵌合部を設け、各可動部操作装置33L,85,108の回転操作杆の嵌合部を、一つの電動モータ56の出力軸62を嵌合できるよう形成する。
(もっと読む)
トラクタ
【課題】機械式のポジション制御機構を備えるトラクタにおいて、昇降スイッチによる作業機上昇位置の調整機能を実現するにあたり、センサの追加を不要とし、大幅なコストダウンを図る。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、電動モータ25の出力パルスに基づいて特定される上昇側の所定位置までモータ作動体24を作動させ、さらに、上昇側の所定位置を決めるパルス数を上限設定ボリューム29で任意に設定可能とした。
(もっと読む)
トラクタ
【課題】要求精度を満たしつつ、電動モータのロック回数を減らす。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、モータ作動体24を上昇側の機械的なロック位置まで作動させ、昇降スイッチレバー23の下降操作に応じてモータ作動体24を下降側に作動させる際には、電動モータ25の出力パルスに基づいて特定される下降側の所定位置までモータ作動体24を作動させる。
(もっと読む)
乗用型田植機
【課題】本発明の課題は、圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行える整地ロータ付きの乗用型田植機を提供することである。また、整地ロータの上下調節及び収納を同じロータ昇降用モータで行って、苗植付作業時に整地ロータを収納位置にしたままで使用できないような不具合を防止できる整地ロータ付きの乗用型田植機を提供することである。
【解決手段】走行車体2の後部に苗植付部4を昇降自在に設けると共に、走行車体2の横幅方向に向けて配置され地面を整地するロータ27a,27bを苗植付部4に対して昇降自在に設けた乗用型田植機において、ロータ27a,27bをロータ昇降用モータ63の作動にて収納状態に自動的に切替え、苗植付作業時にはロータ昇降用モータ63の作動にてロータ27a,27bをロータ高さ調節ダイヤルで設定した高さに自動的に調整する制御装置100を備えた乗用型田植機。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を昇降自在に支持し、水田作業装置に対地作業装置を備えた水田作業機において、水田作業装置が設定高さから下降側に変位した場合、対地作業装置が田面の泥を押してしまう状態を少なくする。
【解決手段】 水田作業装置の田面Gからの高さを検出する高さセンサー68と、高さセンサー68の検出値に基づいて水田作業装置を田面Gから設定高さに維持するように昇降駆動する昇降制御手段とを備える。水田作業装置5に対地作業装置53を昇降自在に支持し、対地作業装置53を水田作業装置に対して昇降駆動する昇降機構56を備える。水田作業装置が設定高さから下降側に変位すると、昇降機構56を対地作業装置53の上昇駆動側に作動させる上昇手段を備える。
(もっと読む)
水田作業機
【課題】作業装置を後輪に近い位置に配置することができ、水田作業機の全長を短く抑えることができる水田作業機を実現する。
【解決手段】走行機体3の後部に連結した作業装置6をローリング駆動装置16により駆動ローリング可能に構成してある水田作業機において、作業装置6に接続されるローリング駆動装置16の操作部50を、昇降リンク機構5の左右中央から右又は左に偏位させて、昇降リンク機構5の後部上部に備える。
(もっと読む)
作業車の作業装置操作構造
【課題】 作業装置が所定姿勢に維持されるように操作信号を出力してアクチュエータを作動させる姿勢制御手段を備えた作業車の作業装置操作構造において、姿勢制御手段の操作信号に応じてアクチュエータが高速で作動するように構成した場合、アクチュエータの破損を防止する。
【解決手段】 作業装置が所定姿勢に維持されるように操作信号を出力してアクチュエータ38を作動させる姿勢制御手段を備え、姿勢制御手段の操作信号に応じてアクチュエータ38が高速で作動するように構成する。設定されたアクチュエータ38の作動速度に対応する姿勢制御手段の操作信号を、設定操作信号として設定する。姿勢制御手段の操作信号が設定操作信号を越えて高速作動側に変位すると、姿勢制御手段の操作信号による作動速度よりも低速の作動速度でアクチュエータ38を作動させる。
(もっと読む)
作業機
【課題】アタッチメントの昇降駆動機構を数少ない部品でコンパクトかつ安価に構成すると共に、アタッチメントの回動角を十分に確保し、アタッチメントをコンパクトに格納できるようにする。
【解決手段】走行機体100に連結されて所定の作業を行う作業機本体2と、作業機本体2に昇降自在に連結され、作業形態に応じて昇降操作されるアタッチメント3とを備える作業機1において、アタッチメント3と一体的に連結される支持プレート26、27を、作業機本体2側で上下回動自在に支持すると共に、支持プレート26の外周部に形成されるギヤ歯26aにピニオンギヤ28を噛み合わせ、該ピニオンギヤ28の回転駆動によりアタッチメント3を昇降させる。
(もっと読む)
作業機
【課題】アタッチメントを使わない作業においては、アタッチメントを上下反転位置まで上昇させ、コンパクトに格納できるようにする。
【解決手段】走行機体に連結されて所定の作業を行う作業機本体2と、回動支点Aを介して作業機本体2に昇降自在に連結され、作業形態に応じて昇降操作されるアタッチメント3と、作業機本体2とアタッチメント3との間に介設され、アタッチメント3の昇降作動及び/又は昇降補助を行う昇降作動部4とを備える作業機1において、一端がアタッチメント3に上下回動自在に連結される第一リンク6と、一端が作業機本体2に上下回動自在に連結され、かつ、他端が第一リンク6の他端に回動自在に連結される第二リンク7とからなるリンク機構8を構成し、該リンク機構8を介して昇降作動部4をアタッチメント3に連結する。
(もっと読む)
農機具の支持装置
【課題】 農機具の上げ下ろし作業の労力の軽減を図ることができ、しかも、作業時において、農機具を作業位置に固定する固定部分に作用する荷重を軽減することができる農機具の支持装置を提供する。
【解決手段】 ネジ式伸縮構造によって長さ方向伸縮可能に構成された操作部材25を設け、この操作部材25の長さ方向一端側をトラクタの後部に設けられた支持フレーム6に対して固定の部材に支持し、該操作部材25の長さ方向他端側を連動機構24を介して農機具15と一体回動する部材に連動連結し、前記操作部材25を伸縮させることにより連動機構24を介して農機具15が上下に回動するように構成する。
(もっと読む)
昇降装置
【課題】小型化、省エネ化及び油脂類の削減を実現し、ミッションケースから着脱可能としたトラクタの昇降装置を提供する。
【解決手段】ミッションケース11上にリフトアーム19・19を上下回動自在に支持する昇降装置ケース10を設け、該昇降装置ケース10に駆動モータ14を配設するとともに、該駆動モータ14の駆動軸15とリフトアーム19・19の間にウォームギヤを有する歯車式伝動機構を配置し、該駆動モータ14によりリフトアーム19・19を上下回動可能に構成した。また、前記駆動モータ14、リフトアーム19・19及びウォームギヤを、前記昇降装置ケース10内に一体として配置し、該昇降装置ケース10を前記ミッションケース11から着脱可能とした。
(もっと読む)
農作業機のローリング制御装置
【課題】 走行機体に作業装置を電動モータにより駆動ローリング自在に連結し、傾斜検出手段によって作業装置における左右方向の傾斜角度を検出し、その検出傾斜角度に基づいて電動モータを通電作動させて、作業装置の左右傾斜角度を目標傾斜角度に近づけるよう構成した農作業機のローリング制御装置において、電動モータやそのドライバーの熱保護や過負荷保護を図るとともに、負荷が軽減した後のローリング制御を遅れなく速やかに行えるようにする
【解決手段】 検出傾斜角度θと目標傾斜角度θ0との偏差に基づいて電動モータ53の駆動電流を制御するよう構成するとともに、電動モータ53の駆動負荷を検知する負荷検知手段を備え、検知された駆動負荷が設定範囲内に維持されるように電動モータ53の駆動電流を制御する保護手段を備えてある。
(もっと読む)
作業車の作業機昇降制御装置
【課題】機械的に作動するポジション制御バルブを機械的なポジション制御リンクで昇降制御するという安価かつ信頼性の高いシステムを用いるとともに、作業機の下降時にはポジションレバーの操作においても、モータを用いた他の操作による下降操作においても同様な減速を行うことを可能とする作業車の作業機昇降制御装置を提供する。
【解決手段】作業機14の昇降高さを検出する手段と、ポジション制御バルブ90にリンクを介して連繋した正逆転可能なモータ95と、昇降操作手段に設けた昇降スイッチとを制御手段60と接続し、前記電動モータ95はポジション制御バルブ90の上昇方向に規制を解除し下降方向に規制を持つ連繋構造であり、電動モータ95は前記ポジションレバー20の位置に関わり無く、作業機14の昇降位置に応じてポジション制御バルブ90の下降方向の油圧流量を規制する位置に動作することにより、作業機下降時の減速を可能とした。
(もっと読む)
1 - 20 / 34
[ Back to top ]