
Fターム[2B304PC15]の内容
Fターム[2B304PC15]の下位に属するFターム
パルス信号 (7)
Fターム[2B304PC15]に分類される特許
1 - 20 / 34
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
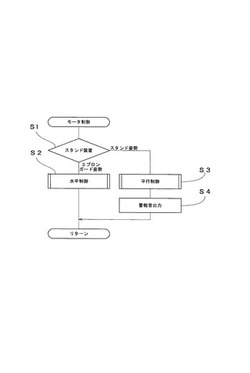
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
作業機の作動システム

【課題】第三者による作業機の作動を確実に防止することができる作業機の作動システムを提供する。
【解決手段】管理サーバ3は、ユーザ登録の完了後に携帯用IDコードを携帯端末4に送信するIDコード送信手段51を備え、携帯端末4は、IDコード送信手段51から送信された携帯用IDコードを保存するデータ記憶手段7と、データ記憶手段7に記憶された携帯用IDコードを作業機2に送信するデータ送信手段8とを備え、制御装置5は、携帯端末4から送信された携帯用IDコードと予め保存された作動用IDコードとの照合を行うIDコード照合手段と、照合手段によってIDコードの照合が成立したときに制御装置5による通常制御を許可すると共に照合が不成立のときに通常制御を許可しない制御制限手段とを備えている。
(もっと読む)
農作業機
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、操作ユニット11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、農作業機に配置される制御ボックス13内の制御部133の制御により農作業機の一部をアクチュエータ56、56’により作動させる農作業機において、制御ボックス13の表面に非常動作用スイッチ131を設け、非常動作用スイッチ131をONとすると、制御部133はアクチュエータ56、56’を作動させる
(もっと読む)
リモコン操作装置
【課題】煩わしい操作をすることなく、複数種類の農作業機に対して共通に使用できるリモコン操作装置を提供する。
【解決手段】リモコン操作装置1は、複数種類の農業機械に対して共通に使用可能なものであり、複数種類の農業機械の各操作が可能な操作スイッチ11を表示する操作表示部10を有する。操作表示部10は、これを見る角度に応じて複数種類の農作業機のいずれかに対応する操作スイッチ11を表示する。操作表示部10は、複数種類の農作業機の各操作に使用される操作スイッチの画像が描かれたスイッチ画像シートと、スイッチ画像シートの画像上に配置された複数のレンチキュラーレンズとを有してなる。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
農作業機の操作給電システム
【課題】トラクタに装着して農作業を行う作業機をトラクタから脱着する際に、操作及び給電のためのハーネスの取り付け、取り外しが不要となる農作業機の操作給電システムを提供することを目的とする。
【解決手段】トラクタ1に装着して農作業を行いトラクタ1と脱着可能な作業機2と、トラクタ1側に設置される送信部16と、作業機2に設置される受信部22とを有し、操作部10からの操作情報を、送信部16と受信部22の間で無線送信して作業機2側に送信し、トラクタ1に有する電源11からの電力を、送信部16と受信部22の間でワイヤレスで電力伝送して作業機2側へ送る。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
農業機械(Aトラクター)と耕作機械の間を無線で遠隔操作をし、その動作リモコンは、自己発電自己蓄電をするワイヤーレス及びワイヤーレスリモコンであって、耕作機械においても動作電源は、自己発電自己蓄電をし、かつワイヤーレス及びコネクターレスにした装置。
【課題】
農業機械(トラクター)と耕作機械の間をケーブルレスとコネクターレスにして、かつ動作リモコンも同様にワイヤーレス、コネクターレスにしたことを提供する。
【解決手段】
動作リモコンの電源は、4−1ソーラーパネルやバイモルフモジュールから形成されて自己発電自己蓄電する1−1蓄電部と1−a操作部からの命令信号を1−2CPU部で処理をして1−iアンテナ部から1−k電波として飛ばし、B耕作機械へ取り付けられた3制御体の3−aアンテナ部へ送り、3−1RFモジュール部が3−3制御部へ命令信号に変換して、3−4耕作機械の駆動部を動作させる。
必要な電源は3−2蓄電部で自己発電自己蓄電を行い、電源を必要とする各ブロックや電子部品、電気部品に供給することによって、Aトラクター本体とB耕作機械との間をケーブルレスやコネクターレスに実現して、4制御体本体の4−4バッテリーの交換やメンテナンスフリーを実現したのである。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1搭載用制御装置において、コントローラ210側の端子とコネクタ296側の端子との間で酸化皮膜が形成され、接触抵抗が増加し始めた異常初期の段階を把握できるようにする。
【解決手段】制御手段210,213,281,282には、各入出力系機器と制御手段210,213,281,282との接続部Jnにおける接触抵抗rnの変化を代替的に検出するための代替検出回路300,400を備える。制御手段210,213,281,282は、代替検出回路300,400の出力電圧V2と、制御手段210,213,281,282に予め記憶された規定電圧V0との比較結果に基づいて、接続部Jnの接触抵抗rnの異常初期を検出するように構成する。
(もっと読む)
作業機用基板
【課題】アナログセンサによる検出値と制御部による検知位置との誤差の発生を回避しやすく、しかもセンサ側の短絡が発生しても制御部のシステムダウンを回避できる作業機用基板を提供する。
【解決手段】制御部41に電力供給する電源42からアナログセンサ32に電力供給する電源回路44、電源回路44における設定電圧値以上の出力電圧降下を制御部41に検出させる検出回路46、電源回路44を電力供給状態と電力供給停止状態とに切り換える切り換え回路48を備えている。制御部41は、電源回路44に設定電圧値以上の出力電圧降下が発生した状態において電源回路44を電力供給停止状態に切り換えるべく検出回路46による検出結果を基に切り換え回路48を操作する。
(もっと読む)
作業車両
【課題】作業車両に連結された作業機の操作性を良くして作業効率を高めるための操作部を備えた走行車両を提供することである。
【解決手段】作業車両のステアリングハンドル73の近傍に一方向及び他方向にそれぞれ2段階に操作可能な作業機84の昇降用レバー130を設け、更に該昇降用レバー130を操作すると作業機84を作動させる制御処理装置100を設ける。制御処理装置100は、昇降用レバー130を一方向又は他方向に第1段階目に操作するとそれぞれ作業機84の作動の入り又は切りをし、第2段階目に操作するとそれぞれ作業機84を上昇又は下降させる処理を行うことで、一本の昇降用レバー130により作業機84の昇降及び動力の入り切りもでき、操作スペースを増やすことがない。また、作業機84の操作性が良好になり、作業効率が上がる。また、昇降用レバー130ではなく、昇降用スイッチ191として操縦席16の近傍に設けても良い。
(もっと読む)
コンバイン
【課題】刈取部を実際の機体の姿勢に即した昇降位置に速やかに昇降させて、該刈取部の地面への突っ込みや高刈りを確実に防止する。
【解決手段】機体に昇降制御可能に支持した刈取部4と、該刈取部4を昇降手段により昇降制御する制御手段30とを備えるコンバイン1において、前記機体の水平基準面に対する前後傾斜角度を検出する傾斜角検出手段32と、前記機体のピッチングの角速度を検出する角速度検出手段33と、前記刈取部4の機体に対する昇降位置を検出する昇降位置検出手段35とを備え、前記制御手段30により傾斜角検出手段32の検出値と角速度検出手段33の検出値とに基づいて検出後の機体の姿勢を予測し、その予測結果に応じて設定した予測昇降位置まで前記刈取部4を昇降させる昇降制御を行う。
(もっと読む)
作業車両
【課題】電源のON操作を携帯電話により操作することでキーの抜き忘れや所持すること自体の忘れを防ぐことができ、さらに、遠隔操作することによって盗難を防止することができる作業車両を提供する。
【解決手段】携帯端末120と通信する通信手段132と、携帯端末120から受け付けた認証コードに基づいて認証処理を行うコード認証手段146を備えた作業車両130であって、電源149のON/OFFを制御する制御手段を備え、前記コード認証手段146が前記携帯端末120からの認証コードを認証すると、前記電源149がONされる構成とした。
(もっと読む)
トラクタの耕深制御装置
【課題】本発明の課題は、ロータリのリヤカバーの動きを常にセンシングして、リヤカバーが設定値を一定以上越えると、車速を制御する油圧式無段変速装置のトラニオン軸を減速方向に作動させ、リヤカバーが元の位置に復帰すると車速を元に戻すように制御することで、エンジン回転を落すことなく、制御反応を速くして作業能率の向上、エンストの防止化を図る。
【解決手段】本発明は、車体の後部に昇降可能なロータリ作業機を装着して設け、該ロータリ作業機に装着されたリヤカバーの上下回動角を検出するリヤカバーセンサを設け、前記リヤカバーの回動角が設定された設定値を所定値以上越えると、前記リヤカバーセンサの検出結果に基づき、車速を制御する油圧式無段変速装置のトラニオン軸を減速方向に制御する減速制御手段を設けてあることを特徴とするトラクタの耕深制御装置の構成とする。
(もっと読む)
作業車の姿勢検出装置及び作業車の姿勢制御装置
【課題】 車体が前後方向に移動するときに加速度が発生する場合であっても、車体の水平基準面に対する傾斜角を適正に検出することが可能となる作業車の姿勢検出装置を提供する。
【解決手段】 車体の前後傾斜角を求める傾斜角算出手段300が、加速度検出手段200にて検出される加速度が設定値より大きいとき及び加速度が設定値よりも大きい状態から小さい状態になったのち検出状態復帰用設定時間が経過するまでの間は、加速度が設定値よりも大きくなったときにおいて求めている車体の前後傾斜角、及び、時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求め、且つ、加速度が設定値より小さく且つ検出状態復帰用設定時間以外のときには、時間経過に伴って順次検出される傾斜角センサ24の検出値及び時間経過に伴って順次検出される角速度センサ25の検出値に基づいて、車体の前後傾斜角を求める。
(もっと読む)
自動旋回制御式苗移植機
【課題】圃場の往復植付け走行時は自動旋回制御によりオペレータの手を煩わすことなく植付装置が稼動制御されるとともに、周回植付け走行時は植付装置により植付け動作を確実に継続することが可能となる自動旋回制御式苗移植機を提供する。
【解決手段】自動旋回制御式苗移植機は、操舵操作により圃場の旋回走行が可能な機体と、稼動指令により苗移植動作する植付装置(7)と、稼動指令により圃場面を整地動作するな整地装置(16)と、機体の旋回操作と連動して植付装置(7)を稼動制御する自動旋回制御部(21)とを備えて構成され、上記自動旋回制御部(21)による植付装置(7)の稼動制御の適用は、上記整地装置(16)の稼動停止を条件として制御構成したものである。
(もっと読む)
1 - 20 / 34
[ Back to top ]