
Fターム[2B304QA01]の内容
Fターム[2B304QA01]の下位に属するFターム
原動機、伝動機構(例;PTO) (30)
操作装置、操作状態 (41)
操舵装置、操舵状態 (80)
走行装置、走行状態 (110)
Fターム[2B304QA01]に分類される特許
1 - 15 / 15
田植機
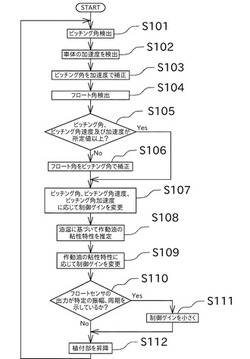
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
作業車両

【課題】対地作業機を牽引する作業車両において、傾き一定制御の実行中に走行機体を旋回させると、遠心力のせいで対地作業機が誤制御されるという問題を解消する。
【解決手段】本願発明の作業車両1は、走行機体2の後部にリンク機構を介して装着された対地作業機24と、該対地作業機24を前記走行機体2に対して左右に傾動させる傾斜制御アクチュエータ32と、前記走行機体2に設けられた傾斜検出手段81及び角速度検出手段82とを備える。前記両検出手段81,82の検出結果に基づく前記傾斜制御アクチュエータ32の駆動によって前記対地作業機24の傾き一定制御を実行するように構成する。前記傾き一定制御の実行中に前記走行機体2を旋回させた場合は、前記両検出手段81,82の検出結果に拘らず、前記対地作業機24が前記走行機体2に対して予め規定された設定角度となるように前記傾斜制御アクチュエータ32を駆動させる。
(もっと読む)
農作業機
【課題】本発明では、農作業機の走行機体に対地作業機をローリング制御可能に装着した構成で、エンジンの回転速度の変化にかかわらず、ローリング制御が精度良く作動するようにすることを課題とする。
【解決手段】農作業機の走行機体1に対地作業機13を水平シリンダ19の駆動でローリング可能に装着し、走行機体1或は対地作業機13に設けた傾斜センサ23の検出信号とエンジン2の回転を検出するエンジン回転センサ27の検出回転数をコントローラ30に入力し、該コントローラ30から出力する水平シリンダ19の駆動出力デュティー比をエンジン回転数の低下で増加させて水平シリンダ19の動作速度がエンジン2の実用回転域で略一定になるようにした構成したことを特徴とする農作業機の構成とする。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
作業車両
【課題】傾斜センサや加速度センサは高価な備品であり、できればそのような高価な備品を使用しないで作業機を適切に操縦できる走行車両を提供すること。
【解決手段】一対の後輪3,3の上部を覆う左右後部フェンダ21,21またはその近傍にそれぞれGPSアンテナ20L,20Rを装着し、また走行車両の前方のカビネットの天井部にもGPSアンテナ20Fを装着し、アンテナ20L,20Rにより、またはアンテナ20L,20R,20Fにより走行車両の左右方向又は前後方向の傾斜度合いをGPSとの送受信で検出でき、作業機の水平制御などを行うので、その制御の精度が優れたものとなり、高価な角速度センサをはじめ、作業機姿勢制御用の各種センサが不要になる。
(もっと読む)
作業車両
【課題】必要な場合はリフトアームを作動させることができ、なおかつ不用意にリフトアームが作動しないようにしてオペレータの安全を図ったバック側外部作業機を着脱自在に装着した作業車両を提供すること。
【解決手段】バックホウ9を装着して行う作業時には、3点リンク機構30を機体から取り外しているもののリフトアーム38はそのままであり、不意にリフトアーム38が作動すると各種部材を破損させるおそれがある。そこで後ろ向きのシート8でオペレータが作業中には必ず下げ側ソレノイド62aをオンにして、上げ側ソレノイド61aが、たとえオンになっても昇降シリンダ41内に作動油が流入せずにリフトアーム38を上昇させないようにする。
(もっと読む)
作業車の作業機姿勢制御装置
【課題】従来に比べて応答性の早い傾斜センサを用いても安定した対地角度の検出を可能にすることにより、精度の高い農用作業車の作業機姿勢制御装置であるローリング制御装置を提供する。
【解決手段】農用作業車の左右の傾斜を検出する傾斜検出手段と、該傾斜検出手段の検出値に基づいて、前記農用作業車と対地作業機との相対角度を制御する制御手段と、を具備する農用作業車において、前記傾斜検出手段を、農用作業車の機体上に緩衝支持手段を介して配置した。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
トラクタ
【課題】代掻き作業時でも圃場の整地性がある対地作業機のローリング制御が可能なトラクタを提供すること。
【解決手段】ハンドルの旋回角度検出センサ43の検出値に応じて作業機6のリンク機構の左右一対のリフトロッド28の内の一方のリフトロッド28の長さを変更するローリングシリンダ30を伸縮して一対のリフトロッド28の長さを変更することで、作業機6の左右ローリング姿勢の傾斜角度を徐々に走行車体1と平行にする制御装置100を備えたトラクタである。たとえば、ハンドル11の切れ角を小、中、大の3段階に分けて、それぞれ現在のトラクタの検出傾斜角度に対して、作業機6の現在の傾斜角度の1/2、1/4、1/8とする。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機24付きのトラクタ1において、耕地の硬軟度に左右されることなく、耕耘深さ自動制御を実行できるようにする。
【解決手段】 ロータリ耕耘機24には、その耕耘深さRDを検出するリヤカバーセンサ124を設ける。走行機体2には、ロータリ耕耘機24の目標耕耘深さRD0を予め設定する耕深設定器と、走行機体2の対地高さを検出する超音波センサ130とを設ける。耕耘制御コントローラは、基準車高値VH0と超音波センサ130の検出値SWとから沈下量SKを演算して、該沈下量SKに応じてリヤカバーセンサ124の補正後検出値と補正後目標耕耘深さとを求め、補正後検出値に基づいて、ロータリ耕耘機24の現在の耕耘深さRDが補正後目標耕耘深さとなるように昇降制御油圧シリンダの駆動を制御する。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、複数の農作業動作にも対応することが可能な作業車輌を提供する。
【解決手段】 農作業中に入設定すべき制御グループAの自動制御機能110を入設定にすると共に、農作業状態に合せて選択すべき制御グループBの自動制御機能120のそれぞれを個別に入切設定し得る作業モード101と、制御グループA及び制御グループBの自動制御機能110,120を全て切設定にする走行モード100と、制御グループA及び制御グループBの自動制御機能110,120のそれぞれを個別に入切設定し得るユーザ設定モード102とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。このモード選択により、入切設定の一括操作を可能にするものでありながら、複数の農作業動作にも対応する。
(もっと読む)
作業車両の姿勢制御装置
【課題】農作業機を用いた農作業が簡単な運転操作で実行できるものでありながら、作業車両の転倒を防止する制御を容易にできる作業車両の姿勢制御装置を提供する。
【解決手段】リンク機構を介して昇降可能に装着した農作業機に、車両の傾斜角を検出する傾斜センサ120,131と、走行速度を検出する車速センサ127とによる検出結果に基づき作業車両の姿勢制御装置において、総合転倒角を、前記農作業機を前記作業車両に連結した場合の前記作業車両の転倒角とするとき、前記総合転倒角よりも所定角度だけ小さい警報値以上になったときに、オペレータに警報するための警報手段134と、前記傾斜センサの検出値が前記総合転倒角より一定角度小さく且つ前記警報値より大きくなったときに、前記作業車両のエンジンの回転数を強制的に低下させるエンジン回転制御手段114とを備えた。
(もっと読む)
苗植機の苗植昇降制御装置
【課題】 車体の畦越え時の植終い作業では、車体が畦越え走行によって大きく前上り、(乃至後下り)の傾斜姿勢となるため、この車体の後部に装着された苗植装置のフロートによる接地センサでの苗植深さ検出では、苗植装置を苗植付位置や畦越え位置への昇降制御を行わせることは難しく、操作性が煩雑で、間に合わないことや、誤操作が多い。
【解決手段】 苗植装置の対地高さを一定に維持するように制御する植付昇降制御モードと、苗植車体の前後傾斜に基づいて該苗植装置を自動的に昇降させて畦越えしながら苗植付する畦越え植付昇降制御モードとを備えたことを特徴とする苗植機の苗植昇降制御装置の構成とする。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 角速度センサの基準値を刻々と補正する際の演算負荷や必要なメモリ容量が小さく済み、しかも、角速度センサ出力の読み込み頻度が少なくても補正の精度が必要十分に確保される作業車輌における傾斜自動制御装置を提供する。
【解決手段】 一定時間ごとに角速度センサの出力データから現在の基準データを差し引いて差分データを求め、新しい基準データ=現在の基準データ+修正量、修正量=差分データ/(2のn乗)という演算を実行して基準データを修正するので、角速度センサの角速度0に対応する基準値が変化すると、新しい基準値に対応するレベルへ向かって基準データが演算ごとに誘導される。差分データが小さい場合は乗数nを段階的に増加させて修正量を減らすが、差分データが大きい場合は乗数nを段階的に減少させて1回あたりの修正量を増やす。
(もっと読む)
乗用型作業機
【課題】従来、前輪の直進状態から所定角以上の操向によって左右後輪の旋回内側のもののサイドクラッチを切って制動する旋回連繋機構を設けた乗用型田植機があるが、操縦者は旋回に適した車速となるように、アクセル操作若しくは変速操作しなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6・6と左右後輪7・7・を有する乗用型走行車両において、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・I若しくは左右後輪7・7を各別に制動する左右サイドブレーキJ・Jを設けて、左右前輪6・6の所定角度以上の操向操作に連動して、左右前輪6・6の操向方向側の後輪7のサイドクラッチIを切るかサイドブレーキJをかける連携手段を設けると共に、機体旋回位置を判断する手段を設けて機体旋回時に車速を減速する手段を設けた乗用型走行車両。
(もっと読む)
1 - 15 / 15
[ Back to top ]