
Fターム[2B304QB04]の内容
Fターム[2B304QB04]に分類される特許
1 - 20 / 27
作業車両のエンジン負荷制御装置
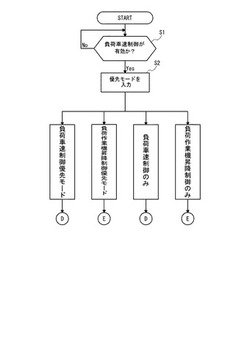
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
作業車両

【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
作業機のロール角度検出構造
【課題】旋回走行中の変速により発生する加速度に起因して、ロール角度検出用のセンサの出力に基づいて演算した機体のロール角度が信頼性の低いものになるのを防止する。
【解決手段】機体のロール角度に応じて出力が変化するロール角度検出用のセンサ77と、このセンサ77の出力に基づいて機体のロール角度を演算するロール角度演算手段40Daを備え、ロール角度演算手段40Daが、旋回情報出力手段Aの出力に基づいて機体の旋回走行を検知している間は、センサ77に働く遠心力を演算する遠心力演算処理と、この遠心力演算処理で得た値に基づいてセンサ77の出力を補正する補正処理を行い、この補正処理後のセンサ77の出力に基づいて機体のロール角度を演算し、旋回情報出力手段Aと変速情報出力手段Bの出力に基づいて旋回走行中の変速を検知している間は、センサ77の出力を取り込まない取込中断処理を行うように構成してある。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】圃場面の状況や刈取対象穀稈の植立状態等の作業状況の違いに応じて適切な刈取昇降制御を行うことにより、良好な刈取作業を行うことが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部における刈幅方向の異なる箇所に配備された複数の接地式の対地高さ検出手段及び目標対地高さ設定手段の情報に基づいて昇降操作手段を制御する刈取昇降制御を実行する制御手段が、手動操作式の制御モード切換指令手段の指令に基づいて、2個の対地高さ検出手段のいずれかが目標対地高さよりも低い値を検出すると刈取部を上昇させる少数検出時上昇処理モードと、全ての対地高さ検出手段が目標対地高さよりも低い値を検出すると刈取部を上昇させる多数検出時上昇処理モードとを切り換える。
(もっと読む)
直播機
【課題】硬軟センサの設置位置を工夫することにより、苗植付深さ又は播種深さの制御度合いを高めた直播機を提供すること。
【解決手段】走行車体2の後部に複数条分の種子を圃場に移送する移送管93,95を備えた直播装置82と移送管93,95の種子排出口を圃場上に向けて保持するフロート55,56を走行車体に対して油圧シリンダ46とリンク装置3により昇降自在に設け、フロート55,56の前方に接地して地面を整地するロータ27a,27bを直播装置82に対して昇降自在に設け、フロート55,56とロータ27a,27bの間に圃場の硬軟センサ114を設け、該センサ114の検出値に応じて油圧シリンダ46を伸縮して直播装置82の播種深さを調節する制御装置101を設けている。
(もっと読む)
農作業機
【課題】本発明は、上記課題に鑑みて、トラクタに装着され、トラクタの基本情報及びトラクタの状態情報に基いて適切に制御可能な動作部を有する農作業機を提供することを目的とする。
【解決手段】制御部3は、あらかじめ記憶部に記憶されたトラクタに関する情報であるトラクタ基本情報101に基づき計算される基本動作パターンをトラクタから取得したトラクタ状態情報102により修正して実動作パターンを計算し、実動作パターンに基づいて、検出部8からの情報により動作部で目的の動作をさせるためにアクチュエータ7の稼動を制御することで上記課題を解決する。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
昇降制御装置
【課題】耕耘作業の開始時において、未耕地の発生及び土盛り量の過多の発生を可及的に防止し得る構造簡単な昇降制御装置を提供する。
【解決手段】車輌本体50に対して昇降可能に連結された耕耘機400を昇降用アクチュエータ220によって昇降制御させる昇降制御装置は、耕耘機400を非耕耘状態位置から自動高さ制御において下降させて設定耕深位置での自動耕深制御を行う耕耘作業の開始時に、リヤカバー437の回動角度θDが所定角度に達した時点から一定時間又は一定区間においては、耕耘機400の昇降制御の制御精度が緩和するように自動高さ制御及び/又は自動耕深制御における制御条件を補正すると共に、制御条件の補正量を、非耕耘状態位置からの耕耘機400の下降速度に応じて変更するように構成されている。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
耕耘制御装置
【課題】車輌本体に対して昇降可能に連結された耕耘機の耕深深さを制御するための耕耘制御装置であって、耕耘作業開始時において、既耕耘地面の表面に凹凸が残ったり、前記耕耘機のハンチング現象が発生することを有効に防止し得る構造簡単な耕耘制御装置を提供する。
【解決手段】耕耘上面カバー435及び耕耘リヤカバー437を含む耕耘カバーがカバー回動用アクチュエータ700によって耕耘爪軸433の軸線回りに前後へ回動可能とされた耕耘機400の耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、前記耕耘機400を非耕耘状態位置hLから下降させて自動耕深制御での耕耘作業を開始させる際に、前記耕耘機400の接地から一定区間又は一定期間においては、前記自動耕深制御を停止すると共に、前記耕耘リヤカバー437の接地長さが延長されるように前記カバー回動用アクチュエータ700を作動させる。
(もっと読む)
農用作業車の作業機姿勢制御装置
【課題】速やかに耕深制御を収束させ、かつ良好な対地作業機の姿勢制御を可能とする、農用作業車の対地作業機における制御技術を提案する。
【解決手段】トラクタ1の左右傾斜を検出する傾斜センサ16と該トラクタ1とロータリ耕耘装置14との相対角度を検出するストロークセンサ17とを併せ持つ検出手段を具備し、該検出手段に基づいて前記ロータリ耕耘装置14の相対角度を制御する制御手段を具備するトラクタ1において、前記検出手段が、前記ロータリ耕耘装置14を下降させて地表と接地する際には、前記トラクタ1と前記ロータリ耕耘装置14との相対角度を基準に動作範囲を規制する。
(もっと読む)
農用作業車
【課題】センサ等を用いてトラクタ等の農用作業車の状態を認識し,その認識内容に基づいて当該農用作業車とロータリ耕耘装置の対地作業機の制御を行う農用作業車において、速やかに耕深制御を収束させ、対地作業機の姿勢制御を行い得る農用作業車を提供する。
【解決手段】農用作業車1の左右傾斜を検出する機構16と当該農用作業車1と対地作業機14との相対角度を検出する機構23を備え、前記検出手段に基づいて対地作業機の相対角度を制御する制御手段21とを具備する農用作業車1において、前記制御手段は、対地作業機14を下降させて地表と設置する際には、対地作業機14のローリング方向対地角度制御の不感帯幅を通常の制御時より広げた。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機の自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、自動耕深制御性能の劣化を防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】車輌本体50に対して昇降可能且つ左右に傾動可能に連結された耕耘機400の自動耕深制御及び自動傾き制御とを行うように構成された姿勢制御装置は、設定耕深位置hsと検出耕深位置hとの耕深偏差Δhに基づく補正前の自動耕深制御量βを、設定傾斜状態tsと検出傾斜状態tとの傾斜偏差Δφに応じて補正し、該補正後の自動耕深制御量β’によって前記耕耘機400の昇降制御を行うように構成されている。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
作業機の自動制御システム
【課題】 走行機体に連結した作業装置の位置あるいは姿勢を駆動手段によって変更制御するよう構成した作業機の自動制御システムにおいて、数多くのセンサ類を要することなく、複雑な制御を高い精度で安定良く行うことができるようにする。
【解決手段】 作業装置S、あるいは、走行機体Tと作業装置Sを撮像手段によって撮影し、撮影した画像の解析によって作業装置Sの位置情報あるいは姿勢情報を取得し、取得された情報に基づいて駆動手段を作動制御して作業装置の位置あるいは姿勢を変更制御する。
(もっと読む)
水田作業機のローリング制御装置
【課題】 走行機体に連結された水田作業装置を、優れた応答性および高い精度でローリング制御する。
【解決手段】 水田作業装置3に左右方向の傾斜角度θを検知する重力式の角度センサ31と、左右方向の傾斜角速度ωを検知する角速度センサ32とを装備し、角度センサ31および角速度センサ32からの検出情報に基づいて得られた検出傾斜角度θと、角速度センサ32で検出された角速度ωと、角速度センサ32で検出された角速度ωを微分して得られた角加速度dω/dtとを加算した演算値Eに基づいてアクチュエータ23の作動速度を決定する制御手段を備えてある。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機付きのトラクタにおいて、エンジンストールを招来することなく、ロータリ耕耘機の上昇動時に形成される耕耘跡穴及び盛土の大きさを小さくできるようにする。
【解決手段】 走行機体2には、エンジン回転数NEを検出するエンジン回転センサを備える。エンジン制御コントローラは、ロータリ耕耘機が耕耘位置から非耕耘位置に上昇動するとき、エンジントルクTEが所定値TE0より低くなるのを抑制しながらエンジン回転数NEを下限回転数NE0にまで低下させ、これに連動してPTO回転数NPを適宜低下させる。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御を、高精度に実行できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機の耕耘爪の耕耘深さを検出する耕耘深さセンサと、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記耕耘爪の耕耘深さを演算するための前記耕耘制御手段の制御ゲインを無段階に変更するための制御ゲインダイヤルを備え、前記耕耘制御手段は、前記制御ゲインを前記制御ゲインダイヤル値に基づいて変更して、前記耕耘爪の耕耘深さを、設定された耕耘深さにすべく、変更後の前記制御ゲインで制御するものである。
(もっと読む)
1 - 20 / 27
[ Back to top ]