
Fターム[2B304QB28]の内容
Fターム[2B304QB28]に分類される特許
1 - 14 / 14
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
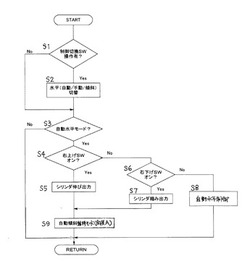
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
農作業機

【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
耕起作業機の耕深制御構造
【課題】エンジン回転数を耕深制御での指標とせずに、耕起装置の耕起深さを設定手段により設定した制御目標耕深に維持できるようにする。
【解決手段】走行車体1に対して耕起装置3を昇降駆動する駆動手段41、耕起装置3の制御目標耕深を設定する設定手段56、耕起装置3の対車体高さを検出する検出手段54、検出手段54の出力が設定手段56の出力に対応するよう駆動手段41の作動を制御する制御手段25A、エンジン6の燃料噴射量を演算する演算手段62、及び、検出手段54の出力が設定手段56の出力に対応したときの演算手段62の出力を制御基準値として記憶する記憶手段25Cを備え、制御手段25Aが、制御基準値と演算手段62の出力に基づいて制御目標耕深を補正し、検出手段54の出力が補正後の制御目標耕深に対応するよう駆動手段41の作動を制御する。
(もっと読む)
コンバイン
【課題】クローラ走行跡に水が溜まり難くして、クローラ走行跡の土壌の軟弱化を防止し、圃場の走行性を向上させる。
【解決手段】左右一対のクローラ走行装置17を備えるコンバイン1において、各クローラ走行装置17の後方に、圃場のクローラ走行跡に排水用の溝を形成する溝切装置24を設ける。これにより、クローラ走行跡に確実に排水用の溝を形成することができ、その結果、クローラ走行跡に水が溜まり難くなる。また、溝切装置24は、機体に対して昇降可能に設けると共に、前処理部2の昇降に連動して自動的に昇降制御される。これにより、オペレータの操作負担を軽減できるだけでなく、圃場端で機体を回行するときに溝切装置24が破損する不都合も回避できる。
(もっと読む)
対地作業機牽引作業車両
【課題】過大な牽引負荷による機体および作業機の保護の確保とともに、過負荷対応動作による作業の中断を最小限度に抑えて能率良く作業を進めることができる対地作業機牽引作業車両を提供する。
【解決手段】対地作業機牽引作業車両は、対地作業機牽引装置に連結した作業機の作業深さを規定する左右のロワリンク(11)と、このロワリンク(11)の昇降駆動制御によって設定の作業深さに調節する制御部(21)とを備えて作業走行可能に構成され、上記制御部(21)は、ロワリンク(11)の牽引負荷を検出し、所定の負荷限度(L)を越えたまま所定時間が経過するとロワリンク(11)を上昇駆動し、この上昇駆動の間の牽引負荷が所定の許容基準値(L−α)まで低下すると上昇駆動を停止するものである。
(もっと読む)
作業機
【課題】後進時において機体の地面への接触を防止しつつ、姿勢の水平制御が可能な作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対する機体の支持高さを昇降させるために当該機体の左右に配置される機体昇降シリンダと、を備える。また、コンバインは、機体の左右傾斜角を検出する傾斜角センサと、機体の前後進操作が可能な主変速レバーと、傾斜角センサの検出値に応じて機体昇降シリンダを制御することで機体を水平制御することが可能な制御部と、を備える。制御部は、操作部の後進操作が検出され(S103)、更に後進速度が所定速度以上であると(S104)、一側の前記機体昇降シリンダを伸長させて機体が最上端になる位置で維持するとともに、他側の前記機体昇降シリンダを伸縮させることで機体を水平に制御する(S106〜S109)。
(もっと読む)
コンバイン
【課題】複雑な操作方法を覚えることなく、直感的な操作で刈高自動制御を一時的に解除して、前処理部の下降や上昇を行えるようにする。
【解決手段】機体前部に昇降自在に連結される前処理部2と、前処理部2の昇降操作を行うマルチステアリングレバー13と、前処理部2の位置をダイヤル位置に維持する刈高自動制御機能とを備えるコンバイン1において、刈高自動制御中にマルチステアリングレバー13が下降操作されたとき、前処理部2をダイヤル位置を越えて下降させると共に、下降操作終了後、所定の時間が経過したら、前処理部2をダイヤル位置に復帰させる。
(もっと読む)
作業車
【課題】本発明の課題は、作業車に装着した作業機を最初は速く降下を開始して着地直前にゆっくりと減速した速度で降下させて軟着地させる所謂デセラ制御において、減速位置の変更中に不用意に作業を開始しても正常にデセラ制御が働くようにすることを課題とする。
【解決手段】作業機18の降下時に地面近くの減速ポイントで降下速度を減速し、作業機18を軟着地するデセラ制御を有する作業車において、作業機18の減速位置を変更する減速位置変更手段21を設け、該減速位置変更手段21は作業車の電源を入り状態にしてから所定時間内のみに変更・登録を可能にし、所定時間経過後は既に設定している減速位置に復帰すべく構成したことを特徴とする作業車の構成とする。また、減速位置変更手段21を入り状態にしてから切り状態にし、さらに、入り状態とすることでデセラ制御の減速位置を変更するように構成したことを特徴とする作業車の構成とする。
(もっと読む)
コンバイン
【課題】走行機体を方向転換させるときのエンジンの過負荷運転を防止でき、且つ運転操作性を向上できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3と、脱穀装置5と、脱穀装置5の扱胴26に穀稈を供給するフィードチェン6とを備えてなるコンバインにおいて、刈取装置3の刈取りを停止する刈取停止手段としてのクラッチスイッチ71または位置センサ72のいずれか一方と、クラッチスイッチ71または位置センサ72のいずれか一方の刈取り停止動作に基づきフィードチェン6を停止させる断続手段としてのクラッチモータ68及びコントローラ70とを備え、刈取装置3を停止することによって、フィードチェン6を停止させるように構成しているものである。
(もっと読む)
作業車
【課題】 作業走行を終えて次の作業箇所に旋回走行して移動するとともに次の作業箇所に自走車体を位置合わせするに当たり、迅速に移動することができ、かつ、精度よく容易に位置合わせすることができる作業車を提供する。
【解決手段】 主変速装置17に連係された制御手段21に、走行速度検出手段22を連係させるとともに旋回角度計測手段30を備えてある。旋回角度計測手段30による計測旋回角度が設定旋回角度になると、制御手段21は、自走車体が低速設定手段24による設定低速度で走行するように、主変速装置17を減速操作する。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御において、前記リヤカバーの均平性能を向上できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記リヤカバーの閉動側の回動限度を決定するリヤカバー閉動制限機構と、前記リヤカバーの閉動側の回動限度の角度を調整する閉動制限アクチュエータとを備えたものである。
(もっと読む)
農業機械
【課題】 各作業機の稼働時間や稼働回数を正確かつ効率的に管理し、各作業機の点検時期や部品交換時期を適切に判断できるようにする。
【解決手段】 走行機体1に各種の作業機3を装着して使用されるトラクタにおいて、作業機3に、読み書き自在なICタグ8を設ける一方、走行機体1に、ICタグリーダライタ9及び制御装置13を設け、該制御装置13が計測した作業機3の稼働時間を、ICタグリーダライタ9を介してICタグ8に書き込む。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
1 - 14 / 14
[ Back to top ]