
Fターム[2B382MA26]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動の対象又は制御手法 (166) | 部材の位置移動又は回動 (103) | 前処理部又は刈取装置 (103) | 移動方向 (38) | 傾斜、ローリング (6)
Fターム[2B382MA26]に分類される特許
1 - 6 / 6
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
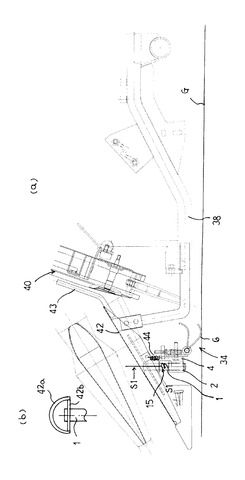
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバイン及び対地高さ制御プログラム

【課題】土の取り込みを防止しつつ水平制御を行うことができる3つ以上の対地高さ検出用ソリ体を備えたコンバイン及び対地高さ制御プログラムを提供する。
【解決手段】対地高さ検出用ソリ体を少なくとも3個以上別々に配設し、それぞれが独立して対地高さを検出する。そして、左右端に位置する対地高さ検出用ソリ体36L、36Rは、畝に対する水平制御手段を有し、また、中央に位置する対地高さ検出用ソリ体36Cは、刈り高さ制御手段を有する。さらに、前記水平制御手段は、左右の畝における最大高さと最小高さの各検出値をもとにして対地平行制御を行い、また、前記刈り高さ制御手段は、3条の畝における最大高さの検出値をもとにして前記刈取部の昇降制御を行う。
(もっと読む)
コンバイン
【課題】土の取り込みを防止しつつ水平制御を行うことができる3つ以上の対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】コンバイン150は、対地高さ検出用ソリ体を少なくとも3個以上有し、それぞれが独立して対地高さを検出する。そして、左右端に位置する対地高さ検出用ソリ体36L、36Rは、畝に対する水平制御用の検出機能を保持し、また、中間に位置する対地高さ検出用ソリ体36Cは、刈り高さ制御用の検出機能を保持する。
(もっと読む)
コンバイン
【課題】簡便な構造で実現することができる3つ以上の対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】コンバイン150は、複数の対地高さ検出用ソリ体36L、36C、36Rに刈取部4を横断する状態で各支軸40L、40C、40Rをそれぞれ連設し、少なくとも支軸40L、40Cを内外層の同軸構成とし、かつ該支軸の各左軸端に前記対地高さ検出用ソリ体36L、36Rとポテンショメータ52L、52Cとを連動連結する複数の連動リンク機構75L、75Cを設けた。また、右支軸40Rの右軸端に対地高さ検出用ソリ体36Rとポテンショメータ52Rと連動連結する連動リンク機構75Rを設けた。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の地面への突っ込みを回避させるようにしながら、刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 目標対地高さが制御状態切換用設定高さよりも高いときには、複数の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部を上昇させ、且つ、目標対地高さが制御状態切換用設定高さ以下であるときには、全ての対地高さ検出手段Aが目標対地高さよりも低い値を検出する多数検出状態である場合に刈取部を上昇させる形態で、昇降操作手段C1を制御する。
(もっと読む)
1 - 6 / 6
[ Back to top ]