
Fターム[2B382MA30]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動の対象又は制御手法 (166) | 部材の位置移動又は回動 (103) | 前処理部又は刈取装置 (103) | 車体、機台の昇降 (6)
Fターム[2B382MA30]に分類される特許
1 - 6 / 6
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
コンバイン

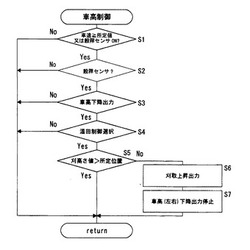
【課題】収穫作業中の車台水平制御出力によって、刈取昇降制御装置が地面に突っ込むことを防止する。
【解決手段】車台(11)を支持する左右一対の走行装置(10)に、該走行装置(10)を左右独立して昇降させる昇降機構を設け、車台(11)の前部には刈取前処理装置(13)を刈取昇降シリンダ(19)で昇降自在に設け、該刈取前処理装置(13)の地上高を刈幅方向の複数個所で検出する接地高さセンサ(25)を設け、該接地高さセンサ(25)で検出された地上高に基づいて走行装置(10)の昇降機構を制御して刈取前処理装置(13)を所定の地上高に維持するコンバインにおいて、接地高さセンサ(25)で検出された地上高が予め設定された下限高さ以下となった場合に、走行装置(10)の昇降機構への水平制御指令を停止する構成とする。
(もっと読む)
作業機
【課題】作業部を備える作業機において、容易かつ効率的な操作で作業部及び機体を昇降させることができるとともに、作業部を用いた作業に速やかに移行できる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの前進操作が検出されている場合において、刈取部が所定位置より上昇側にある状態で、刈取部昇降スイッチの上昇操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。また、制御部は、機体上昇制御が行われた後に、刈取部昇降スイッチの下降操作が検出されると、機体の高さを予め設定される手動設定位置まで下降させる機体下降制御を行う。
(もっと読む)
コンバイン
【課題】構造が簡便でかつ作業性を向上させた対地高さ検出用ソリ体を備えたコンバインを提供する。
【解決手段】対地高さ検出手段は、車幅方向に所定幅を有する対地高さ検出用ソリ体36R、36Lを接地センサーとして刈取部4の対地高さを検出する。対地高さ検出用ソリ体36R、36Lは、それぞれ右主軸40Rとソリ体用枢支パイプ40Lに連設されており、右主軸40Rとソリ体用枢支パイプ40Lは内外層の同軸構成とされている。また、対地高さ検出用ソリ体36R、36Lの揺動を検出するための部材は、すべて刈取部4の一側に配設される。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の地面への突っ込みを回避させるようにしながら、刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 目標対地高さが制御状態切換用設定高さよりも高いときには、複数の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部を上昇させ、且つ、目標対地高さが制御状態切換用設定高さ以下であるときには、全ての対地高さ検出手段Aが目標対地高さよりも低い値を検出する多数検出状態である場合に刈取部を上昇させる形態で、昇降操作手段C1を制御する。
(もっと読む)
コンバインの走行姿勢制御装置
【課題】刈取機を所定高さ位置へ上昇操作して、旋回操作したときには、機体が左右に傾斜すると、左右両側のクローラは昇降制御されることにより、機体が転倒して危険であった。
【解決手段】穀稈を刈取る刈取機8と、穀稈を脱穀する脱穀機9とを設け、所定のスイッチ12の「ON」操作で、刈取機8と、脱穀機9のフィードチェン10との作動を自動停止し、機体1aの左右傾斜と、前後傾斜を検出するローリングセンサ6と、ピッチングセンサ7とを設け、刈取機8が所定高さ位置まで上昇させて停止させると、機体1aをローリング装置4でのローリング制御を停止制御する構成である。
(もっと読む)
1 - 6 / 6
[ Back to top ]