
Fターム[2C014DA03]の内容
Fターム[2C014DA03]に分類される特許
1 - 14 / 14
飛しょう体の誘導方法
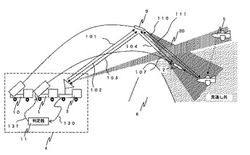
【課題】従来のセミアクティブ方式、あるいはアクティブ方式の飛しょう体誘導システムでは、地上局からのコマンド誘導で目標近傍まで移動は可能なものの、地上レーダからの送信波が見通し外となり目標からの反射波が得られなくなると、終末誘導ができないという課題があった。本発明では、目標が見通し外エリアに入る場合であっても目標の捕捉、追尾を可能にして、目標への誘導精度を高める誘導方法を提供する。
【解決手段】送信機を搭載した第1の飛しょう体9を発射して高出力かつ太ビーム幅の送信波110で見通し外を捜索し、送信機飛しょう体9が見通し外の目標5を捕捉できた場合に、コマンド誘導用の送受信機能を持つ第2の飛しょう体2の発射を許可する。第2の飛しょう体2は第1の飛しょう体9が取得する目標情報に基づき、見通し外の目標5に向けて誘導される。
(もっと読む)
飛翔体誘導システム及び飛翔体誘導方法

【課題】レーザ照射装置、飛翔体、標的の動きにかかわらず、高精度に飛翔体を標的に誘導できる飛翔体誘導システム及び飛翔体誘導方法を提供する。
【解決手段】誘導装置7が、標的9で反射されたレーザ光の受光信号を出力する受光手段7aと、レーザ照射装置8からのレーザ照射情報を受信するレーザ照射情報取得手段7bと、GPS衛星6からの信号による位置情報取得手段7cと、照射位置、飛翔体位置及びGPS衛星位置により、GPS衛星6に対するレーザ照射装置8と飛翔体との距離の差を算出して、内蔵している誘導側時計とレーザ照射装置8の照射側時計とが時刻同期するように校正する時刻校正手段7dと、照射時刻と校正された誘導側時計によって計時されたレーザ光の受光時刻とに基づき距離画像情報を算出し、該距離画像情報に基づき飛翔体を標的9に誘導するための姿勢制御情報を演算出力する姿勢情報演算手段7eと、を備える。
(もっと読む)
弾の誘導装置および誘導方法
【課題】セミアクティブ弾の誘導用エネルギーの出射源を敵に知られにくい態様で目標地点に照射することによって、敵からの攻撃に晒されることがないようにするシステムを提供する。
【解決手段】目標地点の位置のデータと、弾1が目標地点5の近傍4に到達する予定時刻のデータは、通信手段Dを介して発射記録手段Eに送信される。発射記録手段Eでは、弾1を、概ね予定時刻に目標地点5の近傍4に到着するように、概算の飛翔時間を予定時刻から差し引いたタイミングで発射させるとともに、弾1の発射実績を記録する。発射記録手段Eで記録された発射実績のデータと目標地点の位置のデータは通信手段Fを介して予測手段Gに送信される。予測手段Gは、弾1が目標地点5の近傍4に到達する精密な時刻を予測し、通信手段Hを介して誘導照明手段Jに送信される。誘導照明手段Jは、予測時刻以降に、誘導用の照明9を目標地点5に向けて、照射する。
(もっと読む)
飛翔体、飛翔体の飛翔方法及びコンピュータプログラム
【課題】目標の周りの電波の散乱強度が強い方向から、飛翔体をこの目標に接近させることが可能な飛翔体を提供する。
【解決手段】操舵装置12と、目標機2にて反射される電波の反射波を受信する受信部7と、この検波出力から目標機2を捕捉して追跡し、目標方向への測角信号を計算する目標検出器8と、慣性装置13と、飛翔位置及び飛翔速度と予め記憶した目標機2の初期位置及び初期速度とに基づき目標機2の位置及び速度を計算し飛翔体3と目標機2との会合点の方向に向かう飛翔経路を推定演算する方向推定器9と、誘導計算を行って操舵装置12に対する操舵信号を出力する誘導処理器11とを備え、方向推定器9は目標位置及び電波送信源1を含み地表に垂直な面A上で散乱波の散乱強度が強い方向に延びる直線Dを求め、直線Dと目標機2の位置とに基づき飛翔体3の通過点を算出し、誘導処理器11はこの通過点についての操舵信号を計算する。
(もっと読む)
複数波長レーザ誘導システムおよび複数波長レーザ誘導方法
【課題】目標への誘導を継続可能なレーザ誘導システムおよび方法を提供する。
【解決手段】目標Tにレーザ光を照射するレーザ照射装置1と、飛翔体Fに搭載され、レーザ光が照射される目標Tに向けて飛翔体Fを誘導する誘導装置2と、からなり、レーザ光の反射光に基づく目標Tの撮像によって飛翔体Fを目標Tの位置座標に向けて誘導する最中に目標Tの位置座標を検出出来なくなった場合に、レーザ照射装置1において照射するレーザ光の波長を切替え、この波長情報を無線信号によって誘導装置2へ送信する。そして、誘導装置2は目標Tの撮像に使用する反射光の波長を切替え、誘導処理を継続する複数波長レーザ誘導システム。
(もっと読む)
セミアクティブレーザ誘導システム
【課題】 システムの大型化等を招くことなく、飛しょう体の命中精度を改善し、かつ標的検出距離の延伸を図ったセミアクティブレーザ誘導システムを提供する。
【解決手段】 レーザ照射手段1からのレーザ光Lpを標的Xに照射し、当該標的Xで反射された反射光Lrを検出して標的Xの目標角を演算し、この目標角に基づいて飛しょう体を誘導制御するセミアクティブレーザ誘導システムにおいて、レーザ照射手段1は照射するレーザ光Lpを標的Xに対して走査するとともに、その走査角に対応してレーザ光Lpのパルス周期を変化する変調機能を備え、飛しょう体10は検出した反射光Lrを復調して得られるパルス周期から走査角を認識し、この走査角から補正角を求めて検出した反射光の入射角を補正して標的Xに対する目標角を得る機能を備える。
(もっと読む)
耐衝撃光学シーカとその製造方法
【課題】使用する光(例えばレーザビーム)を高いS/N比で検出することができ、かつ1万Gを超える高衝撃を受けても、割れ、ひびなどの損傷をほとんど受けない耐衝撃光学シーカとその製造方法を提供する。
【解決手段】発射時に高衝撃を受け、所定の狭帯域の光3を検出する耐衝撃光学シーカ10。狭帯域の光3を検出する光学センサ12と、その前面に配置された集光レンズ14及び光学フィルタ16と、その前面に配置されこれらを保護する光学ドーム18とを備える。集光レンズ、光学フィルタ及び光学ドームは、発射時の高衝撃に耐え、前記光3の透過率が高く、かつ転移温度が約200℃以上の耐衝撃耐熱プラスチックからなる。またこれらの一部又は全部が、その片面又は両面に薄膜多層膜20を有し、薄膜多層膜の全体で所定の狭帯域のバンドパスフィルタを構成する。
(もっと読む)
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
(もっと読む)
セミアクティブ式誘導装置
【課題】レーザー光の照射時間を短くし、高精度の誘導を行なうセミアクティブ式誘導装置を提供する。
【解決手段】飛しょう体に搭載される誘導装置本体は、パルス光の反射光から追跡目標を抽出するパルス同期反射光抽出部と、追跡目標に反射した可視光又は赤外線のから追跡目標を抽出する光源抽出部とを備える。追跡目標が遠距離にある場合にはパルス光に同期したパルス同期画像を基に誘導開始時に追跡目標を判定し、追跡目標が追跡目標に反射した可視光又は赤外線の撮像画像から判定するに十分な距離に近づいたとき可視光又は赤外線の撮像画像から追跡目標を判定するように選択を切替える。
(もっと読む)
大気圏外および内気圏のターゲットを迎撃するための多数の破壊ビークル(MKV)迎撃装置及び方法
CV12とKV14との間でタスクを共有することにより、MKV迎撃装置10は多数のターゲットを迎撃し破壊することができる価格が効率的なミサイル防衛システムを提供する。全てのKVのターゲット捕捉および弁別と中間軌道誘導を行うためにCV上に捕捉及び弁別センサと制御センサ38を配置することは単一の迎撃装置を「最小化」しようとすることに関連する重量と複雑性の問題を回避する。各KVにおける短帯域の結像センサの配置はコマンド誘導システムに関連される潜在性、解像度、帯域幅の問題を克服し、各KVが所望される目標点を正確に選択し、目標に命中させるためその軌道を維持することを可能にする。 (もっと読む)
セミアクティブ方式の電波誘導装置
【課題】到来する移動物体に照射した電波の反射波を、ドップラ成分を用いて確実に分離、抽出し、安定した誘導制御を行うセミアクティブ方式の電波誘導装置を提供する。
【解決手段】リアアンテナ2で受けた目標照射波を利用したキャンセラ回路3〜6により、フロントアンテナのバックローブで受けた目標照射波の信号成分のキャンセル能力を向上しているため、飛しょう体が目標照射波のメインビーム内に有っても目標に関するドップラ成分を分離・抽出し、安定したセミアクティブ方式の電波誘導を行うことが可能となる。 また、上記キャンセラ回路を採用することにより、局部発振器が不要になり、小型軽量の飛しょう体に適した設計を行うことが可能となる。 また、モノパルスコンパレート機能をデジタル信号処理にて行うことにより、モノパルスコンパレータが不要になり小型軽量の飛しょう体に適した設計を行うことが可能となる。
(もっと読む)
飛翔体のレーザ誘導装置
【課題】従来の飛翔体のレーザ誘導装置では、太陽光などによるジャミングに感応し易いという問題点があった。
【解決手段】目標Tに照射したレーザ光LTの反射光LRを受信して飛翔体Fを誘導する装置であって、所定の基準時間に基づいてレーザ光LTをパルス状に送信する光送信手段1と、飛翔体Fにおいて被検出光(LR)を受信する光受信手段2を備え、光受信手段2が、光送信手段1と共通の基準時間に基づいて動作制御されると共に、光送信手段1のレーザ光の送信タイミングに対応して反射光LRの信号検出を間欠的に行う手段であり、レーザ光LTのパルス状の送信タイミングと反射光LRの間欠的な信号検出タイミングを同期化することで、ジャミングを受け難いものにして誘導機能の向上を実現した。
(もっと読む)
電波照射装置、および誘導装置
【課題】 海面からのマルチパスの影響によって、目標体に照射され目標体で反射される反射波のレベルが低下するという問題があった。
【解決手段】 目標体の存在方向、目標体高度および目標体までの距離の情報を計測し、計測した目標体の情報に基づいて、アレイアンテナ装置の送信ビームの指向方向を、目標体の存在方向から所定角度だけ上方にオフセットさせることによって、目標体に照射される電波に対するマルチパスの影響を緩和することができる。
(もっと読む)
カーゴ弾およびカーゴ弾の誘導装置
【課題】
榴弾、カーゴ弾といった無誘導の砲弾と、セミアクティブ弾等の誘導弾は、それぞれ長所と短所を併せ持つが、本発明は、両者の長所のみを有し、短所をなくして、発射地点からの射程距離が大きい目標地点に極めて高い命中精度で弾着させることを解決課題とする。
【課題を解決するための手段】
第1発明のカーゴ弾100は、目標地点401、501に向けて誘導制御される誘導弾200が子弾として、内蔵されているとともに、弾100に旋転を与える弾帯105が形成され、目標地点401、501の近傍450、550で誘導弾200を放出する放出手段としての信管101、放出薬102、プレッシャープレート103、弾底栓104が備えられたものである。第2発明のカーゴ弾100の誘導装置は、カーゴ弾100に加えて、さらに、カーゴ弾100を目標地点401、501の近傍450、550に向けて発射する発射手段300と、誘導用照明Lを目標地点401、501に照射する誘導用照明照射手段600とが備えられたものである。
(もっと読む)
1 - 14 / 14
[ Back to top ]