
Fターム[2C150ED14]の内容
玩具 (16,863) | 制御 (873) | 制御対象 (343) | 方向 (169) | 方向変換の手段又は部材 (44) | 方向制御用の車又は球体 (6)
Fターム[2C150ED14]に分類される特許
1 - 6 / 6
車両おもちゃ
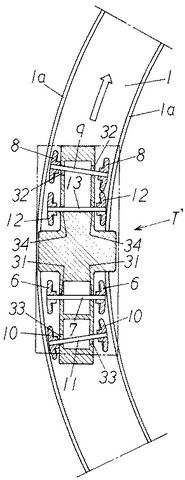
【課題】軌道から離脱するのを防ぐことができる車両おもちゃを提供する。
【解決手段】軌道1上を自走する車両おもちゃTは、左右一対の駆動輪6と、左右一対の第1の従動輪8と、左右一対の第2の従動輪10とを有し、駆動車軸用穴31は、駆動車軸6の回転を許容する大きさであり、且つ、駆動車軸6がシャーシに対して前後方向、左右方向及び斜め方向の移動を許容しない大きさであり、第1の従動車軸支持穴32は、第1の従動車軸9が駆動車軸7に対して前後方向、左右方向の水平移動を許容する大きさであり、第2の従動車軸支持穴33は、第2の従動車軸11が駆動車軸7に対して前後方向、左右方向の水平移動を許容する大きさである。
(もっと読む)
姿勢制御付き無人二輪車

【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
全方向性車両玩具並びにその車輪
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
障害物センサおよび障害物センサを有する玩具
【課題】
検出対象を一定の範囲に限定しない、検出範囲の広い障害物検出センサであり、且つ、構造を単純なものとすることができる障害物検出センサを用いた玩具を提供する。
【解決手段】
本発明は、モータを制御する駆動制御手段と、前記モータに流れる電流を検出する検出手段と、前記検出手段から過負荷電流検出信号が入力されると前記駆動制御手段にモータを逆転させる制御信号を出力する主制御手段とで構成される制御スイッチ回路と、動力部と車輪部とにより制御される走行手段を有し、前記走行手段は動力部と車輪部との間に転舵部を有し、転舵部はモータの回転方向により車輪の向きを変化させるものであり、外部にセンサを用いることなく、スイッチをONとするだけで、障害物にぶつかる度に走行方向を変え、自動で障害物から脱出することができる、変化のある複雑で楽しい動きを楽しむことができる走行玩具である。
(もっと読む)
ロボット装置及びその制御方法、並びに受動車輪装置
【課題】 2足歩行ロボットの各可動脚に対し、駆動アクチュエータを持たない受動車輪機構を装備し、車輪の推進による高速且つ高効率の移動を実現する。
【解決手段】 足底ベース部をロール方向に回転することで、受動回動軸回りの回転を生じさせることにより、受動車輪を操舵し、脚をヨー方向に駆動することを容易にすることができる。これにより両脚支持状態であっても滑らかな操舵が可能となり、走行路面上で脚先を左右対称に蛇行運動させることで直進・旋回することが出来る。
(もっと読む)
1 - 6 / 6
[ Back to top ]