
Fターム[2C150ED65]の内容
Fターム[2C150ED65]に分類される特許
21 - 27 / 27
ポータブルデバイス
【課題】
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
(もっと読む)
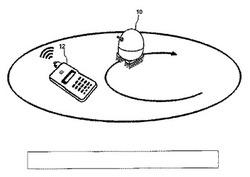
飛行体

【課題】スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間、超音波モータと回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供する。
【解決手段】本発明の飛行体は、複数の回転翼を有するロータと、前記ロータを回転可能に支持する軸とを備え、前記回転翼の回転により生じる推力により飛行する飛行体であって、前記ロータに、太陽電池71と、接触部および圧電素子を備えた振動体4を有する超音波モータと、充電部および駆動回路を有する回路部とが設けられており、前記振動体4は、前記駆動回路によって前記圧電素子に交流電圧を印加することにより振動し、この振動により、前記接触部を介して前記軸の外周部に力を繰り返し加え、該軸の外周部から受ける反力により該振動体4自身と共に前記ロータ3を回転させるよう構成されている。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に装着され、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵し、この人形の移動制御部と二輪車の走行制御が無線操縦による無線操縦式二輪車玩具において、人形の移動制御部は二輪車中央に搭載されて、人形を駆動する駆動部が人形胴体部に刻設された穴部に遊嵌する無線操縦式二輪車玩具を提供する。 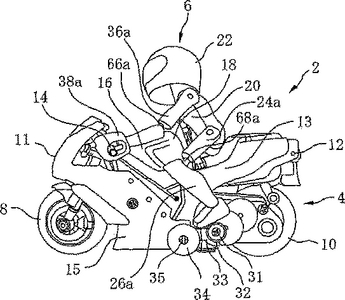 (もっと読む)
(もっと読む)
偏重心飛行円盤
【課題】重心が中心以外にあるか、または移動できることにより変則的に回転して飛行することができる飛行円盤のような玩具を提供する。
【解決手段】飛行円盤の中心以外の部分に重りを設ける、さらに前記重りがぜんまいなどにより時間と共に移動することにより重心を変化させ変則的に飛行させる。また前記重りを遠隔制御により移動可能にし重心を変化させ変則的に飛行させることを可能にする。具体的には円盤本体1に重心を偏らせて飛行可能である適当な重り2が移動できるレール3を設けることにより重心を移動できる。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】小型且つ簡単な構成でロボットのエネルギー消費を低減しつつ、脚体の関節アクチュエータの負担を軽減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置11はばね手段21(気体ばね)を備えており、シリンダ23内のピストン24がロボットの脚体3の膝関節8における大腿部4および下腿部5の相対的変位運動(屈伸運動)に応じて上下動する。ピストン24の上下の気室25,26に気体が充填されている。膝関節8での曲げ度合いが所定値以下であるときには、気室25,26がシリンダ23内の溝28を介して連通して、ばね手段21は弾性力を発生せず、曲げ度合いが所定値を超えると、気室25,26が互いに密封状態となってばね手段21が弾性力を発生し、その弾性力が膝関節8に補助駆動力として作用する。
(もっと読む)
転回移動玩具
【課題】緩急のある興趣性に富んだ転回動作を行なうことができる転回移動玩具を提供する。
【解決手段】内部に左右方向に蛇行する重錘球転動路4が設けられた胴体1と、胴体1の頭側の腕枢支部10に枢支された左右の腕体11と、胴体1の尻側の脚枢支部20に枢支された左右の脚体21と、胴体1の重錘球転動路4内に転がり移動可能に収容された重錘球7とを備えた。
(もっと読む)
回転2足歩行ロボット
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】ベース1の下に、平行リンク機構2で構成し、リンクを駆動できる足を2本、同じ平面で動くよう取り付け、地面側のリンク3に対し回転軸4を地面側のリンク3と垂直でかつ、先の平面内にあるように回転する円盤5を取り付けた脚機構において、歩行する場合は、平行リンク機構の足を2本とも左に傾け、重心を左に移し、重心と反対側の足を右に移動して浮かし、重心側の左足を回転し、ある量回転したら、重心と反対側の足を左に移動し地面に着地させる。次に平行リンク機構の足を2本とも右に傾け、重心を右に移し、重心と反対側の足を左に移動し浮かし、重心側の右足を回転し、ある量回転したら、重心と反対の足を右に移動し地面に着地させる。以上を繰り返し歩行移動する。
(もっと読む)
21 - 27 / 27
[ Back to top ]