
Fターム[2F063GA74]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | コード板、スケールの磁性体配列 (22) | 螺旋、傾斜モード (4)
Fターム[2F063GA74]に分類される特許
1 - 4 / 4
回転部材用物理量測定装置
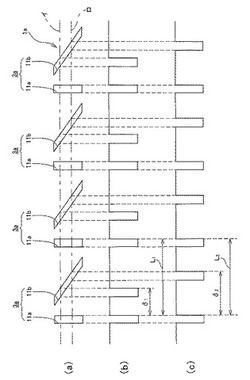
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
シリンダ位置検出装置

【課題】ピストンロッドが回転したとしても誤差のないストローク位置検出を行うこと。
【解決手段】ピストンロッドの表面において、該ピストンロッドの直線的ストローク変位の方向に沿って面積が漸増又は漸減する区間を有する所定のパターンで配置された少なくとも1つの磁気応答部と、シリンダ本体の側に固定され、前記磁気応答部のパターンの夫々に対応して設けられたコイルとを具備する。ピストンロッドの直線的ストローク変位に応じて、該コイルに対する磁気応答部の対応面積が変化し、この対応面積の変化に応じて該コイルに生じる電気的インピーダンスが変化する。コイルは、ピストンロッドの回転によって磁気応答部のコイルに対する対応位置が相対的に円周方向に変位することを許容すべく、該磁気応答部に対向する該コイル端部の幅員を、該磁気応答部のパターンの円周方向についての最大幅よりも所定角度範囲だけ幅広に構成される。
(もっと読む)
転がり軸受ユニットの変位測定装置及び転がり軸受ユニットの荷重測定装置
【課題】外部磁界等の外乱によりセンサ12a、12bの出力信号のデューティ比が変動した場合でも、外輪3とハブ4との相対変位量、延てはこれら外輪3とハブ4との間に加わる荷重を正確に求められる構造を実現する。
【解決手段】エンコーダ13に設け、上記両センサ12a、12bの検出部を対向させた、第一、第二の被検出部の特性変化の位相は、上記ハブ4の軸方向に変化している。演算器は、上記両センサ12a、12bの出力信号が立ち上がる瞬間同士の間の位相差と、これら両センサ12a、12bの出力信号が降下する瞬間同士の間の位相差との両方の位相差に基づいて、上記外輪3と上記ハブ4との相対変位量を算出する。これら両方の位相差に就いて、N=2の移動平均を施す事により、上記デューティ比の変動による影響をなくし、上記課題を解決する。
(もっと読む)
回転角検出装置
【課題】 車両運転時以外には角度位置の追跡をしなくても、ステアリングの絶対回転角度を検出可能として、消費電力を低減する。
【解決手段】 ステアリングシャフト1に対して回転方向には一体で軸方向にはスライド可能のロータ10にスクリュー12を形成し、これをベースのナット部5に噛み合わせ、回転に応じて軸方向に移動可とする。ロータは厚さが徐々に増大する帯状の永久磁石を螺旋状に巻きつけた軸傾斜永久磁石20と駆動歯車14を備え、軸傾斜永久磁石の外周面にホール素子を対向させる。駆動歯車に噛み合う従動歯車31には永久磁石32を固定し、これに対向させてAMRセンサ33を配置する。ホール素子が対向する軸傾斜永久磁石は操舵の全角度範囲にわたって厚さが変化するので、その出力から現在の粗の絶対回転角度が得られる。これと高分解能のAMRセンサの出力とに基いて、高精度の絶対回転角度を得る。
(もっと読む)
1 - 4 / 4
[ Back to top ]