
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
721 - 724 / 724
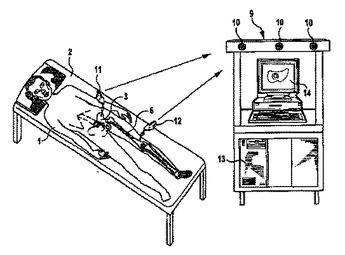
股関節プロテーゼの可動性を判定するための方法及び装置
股関節プロテーゼの可動性を判定するための方法を提案する。この股関節プロテーゼは、寛骨に挿入することができるベアリングカップと、大腿骨に挿入することができ、かつ前記ベアリングカップに球状関節面により旋回可能に取り付けられる補綴骨幹部とを含む。本方法は、前記補綴骨幹部を備えた大腿骨が様々な方向に可能な限り旋回されること、このプロセスの間に、前記ベアリングカップの中心点と前記球状関節面の中心点とが互いから離れるように移動するか否かが判定されること、及び、各旋回方向について、前記2つの中心点が互いから離れるように移動し始める最大旋回角度が決定されること、を特徴とする股関節プロテーゼの可動性判定方法。更に、この方法を実施するための装置も提案する。
 (もっと読む)
(もっと読む)
立体計測装置
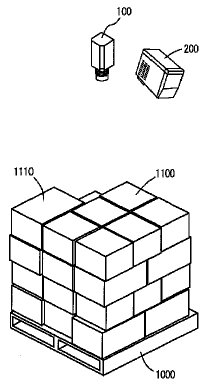
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
車外監視装置

【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
電子部品の外観検査方法、外観検査装置及び外観検査処理をコンピュータに実現させるためのプログラムを記録した記録媒体
【課題】 電子部品のパッケージの撮影画像に含まれるむらや捺印文字等の影響を受けず、真の欠陥のみを確実に判別できる、電子部品の外観検査方法、外観検査装置及び外観検査処理をコンピュータに実現させるためのプログラムを記録した記録媒体を提供する。
【解決手段】 撮像手段103と、撮影した画像を複数の単位領域に分割して、各単位領域毎に、撮影した画像の濃淡レベルの分布をそれぞれ求める手段106と、各単位領域内における濃淡レベルの分布中、最多頻度の濃淡レベルから予め設定されたオフセット値を差し引いて、各単位領域における二値化レベルを求める手段107と、撮影した画像の各座標における二値化レベルを、各単位領域における二値化レベルに基づいて補間演算により求める手段108と、撮影した画像の各座標における各濃淡レベルと、求めた二値化レベルとを比較して、欠陥の存在を判定する二値化手段107とを具備する。
(もっと読む)
721 - 724 / 724
[ Back to top ]