
Fターム[2F069BB04]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | ロボット;マニピュレータ (25)
Fターム[2F069BB04]に分類される特許
21 - 25 / 25
操作部の変位検出機構
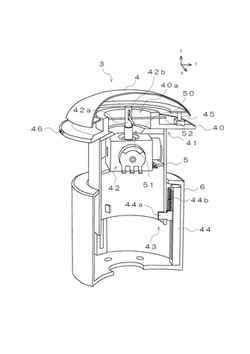
【課題】操作レバーなどの操作部の数を減らし、感覚的に操作を行えるようにすることで、高齢者や弱者、もしくは、初心者などにも操作のしやすい操作部の機構を提供する。
【解決手段】操作者の手によって操作される操作部4の変位量を検出するため変位検出機構3において、前記操作部4を前後左右方向に変位させる第一の変位機構41と、当該第一の変位機構41によって前後左右方向に変位する操作部4の変位量を検出する第一の変位検出センサ42と、前記操作部4と第一の変位機構41とを一体的に上下方向に変位させる第二の変位機構43と、当該第二の変位機構43によって上下方向へのみ変位する操作部4の変位量を検出する第二の変位検出センサ44とを備えるようにする。
(もっと読む)
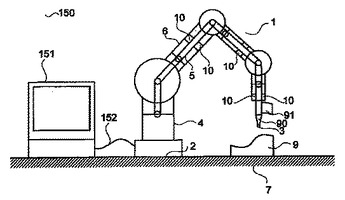
検出器支持装置

【課題】種々のワークに対して検出器の検出方向をワンモーションで切換え、円筒外周面、内周面及び平面の測定を容易に行うことのできる検出器支持装置を提供すること。
【解決手段】検出器支持装置10を、ワークWに対して相対的に直線移動可能な保持台21に一端が固定され、他端に回転軸心RCを有する第1のアーム11と、回転軸心RCを中心に第1のアーム11に対して回転自在に設けられ、先端に検出器31を取り付ける第2のアーム12とで構成し、回転軸心RCを、移動軸HCに対して45°傾斜した平面上に設けるとともに、移動軸HCに対して45°傾斜した平面に対して45°傾斜した平面でかつ移動軸HCを含む平面への投影図において、移動軸HCに対して45°傾斜して設け、第2のアーム12に取り付けられた検出器31の軸心KCが回転軸心RCと交差するように構成した。
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
回転センサ
【課題】 加えられる回転変位(角度変位)の大きさに係わらず、回転検出対象の回転状態を確実に検出することができるようにする。
【解決手段】 回転センサは、円環状の環状容器11を有する。この環状容器11は、円環状の液体流路111を形成する。この液体流路111には、液体が封入されている。また、この液体流路111には、梁12が設けられている。この梁12は、環状容器11の回転に伴って生じる液体の流動によって変位させられる。この梁12には、歪みゲージ13が設けられている。この歪みゲージ13は、梁12の変位を検出する。この歪みゲージ12には、角加速度検出部20が接続されている。この角速度検出部20は、歪みゲージ12の検出出力に基づいて、回転検出対象の角加速度を検出する。
(もっと読む)
21 - 25 / 25
[ Back to top ]