
Fターム[2F069JJ27]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 走査手順 (43) | プログラム走査 (18) | 予め決めてあるもの (11)
Fターム[2F069JJ27]に分類される特許
1 - 11 / 11
多点検査装置と方法
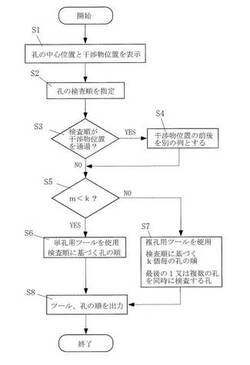
【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
形状計測方法

【課題】三次元計測器によって計測した点群データから計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを生成する。
【解決手段】計測点群データに基づいて計測対象物の表面形状を表すサーフェイスを陰関数として作成する工程と、サーフェイスが存在する計測領域全体を三次元ドロネー図による分割処理により隙間なく、重複なく埋め尽くされた四面体の小領域(以下、セルという)に分割する工程と、セルの各頂点をサーフェイスの内側に存在する内点5と、外側に存在する外点6とに分類する工程と、境界セルを抽出する工程と、境界セルとサーフェイスとの交点7を計算する工程と、各境界セルが持つ交点7を繋ぎ合わせることにより三角形又は四角形の面を求める工程と、全ての面を結合する工程とを含むので、計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを自動的に作成することができる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
三次元形状測定方法
【課題】被測定物が非球面形状であっても、極めて高精度に測定データを取得することができる三次元形状測定方法を提供する。
【解決手段】互いに直交するX軸およびY軸方向に駆動される移動体においてZ軸方向に移動自在に支持されたプローブを、被測定物の測定面に、所定の経路に沿って走査させて前記被測定物の形状を測定する三次元形状測定方法であって、測定時にX−Y方向に移動する移動体の移動量を基準として測定データを取得するサンプリングピッチを、被測定物の既得形状情報から得られる走査上の各位置における被測定物の測定面の法線方向に引いた直線と、被測定物の中心線と、が交わる点を中心として、前記表面上の位置で被測定物の表面形状と接する円を近似円とし、その近似円の半径から算出する。これにより、被測定物の表面形状に沿う方向に対して一定のピッチで測定データを取り込むことができる。
(もっと読む)
直流電動機の整流子診断装置及び整流子診断方法
【課題】整流子の軸方向の異常に対して、定量的な診断を行うことが可能な直流電動機の整流子診断装置及び整流子診断方法を提供する。
【解決手段】変位量測定手段2から照射したY軸レーザ光L1により、変位量測定手段2から整流子12の表面までの距離を測定し、位置検出手段8から照射したX軸レーザ光L2により、変位量測定手段2の整流子12の軸方向への移動量を検出し、変位量測定手段2から整流子12の表面までの距離の測定結果を含む変位量測定信号S1と、変位量測定手段2の整流子12の軸方向への移動量の検出結果を含む移動量検出信号S2を、表面形状診断手段10へ出力し、変位量測定手段2から出力される変位量測定信号S1と、位置検出手段8から出力される移動量検出信号S2に基づいて、整流子12の表面形状を診断する。
(もっと読む)
ワイヤ取付具の幾何学的データを決定するための方法および装置
【課題】ワイヤ取付具の幾何学的データを自動的に決定することができる方法および装置を作り出すための解決法を提供する。
【解決手段】ワイヤ取付具の非接触走査のためのこの方法において、ワイヤ取付具は、第1距離センサ14によって、かつ第2距離センサ15によって走査される。第1距離センサ14は、ワイヤ取付具を、この場合はクリンプコンタクト1の導体クリンプ3を、複数回、下から非接触的に走査する目的を果たす。第2距離センサ15は、クリンプコンタクト1の導体クリンプ3を、上から非接触的に走査する目的を果たす。関連するx、y軸を備える測定値から、ワイヤ取付具の幾何学的データが決定される。
(もっと読む)
耳ゴム付着量測定方法及びその装置
【課題】測定時におけるセンサ移動に伴う振動を低減して測定精度の向上を図った耳ゴム付着量測定方法及びその装置を提供する。
【解決手段】スチールコーティング材料300による遮光量が非遮光時における全光量の約1/2となった位置で計測ユニット120A,120B及びレーザ光射出ユニット131A,131Bを停止し、受光器132A,132Bの受光量によってスチールコーティング材料300の側端位置を検出した後、磁気センサ164A,164Bを移動させてスチールコーティング材料300の最外側のスチールワイヤー部材301の位置を検知し、スチールコーティング材料300の側端位置とスチールコーティング材料の最外側のスチールワイヤー部材301の位置との間の距離を耳ゴム付着量として算出して表示する。
(もっと読む)
NC加工装置
【課題】加工後のワークの形状をより容易に測定することが可能なNC加工装置を提供する。
【解決手段】先端部TSSが所定方向に付勢されており、当該所定方向にスライド可能であるとともに、前記先端部TSSが前記所定方向に平行に移動した距離に関する信号を出力するタッチセンサTSと制御手段とを備える。制御手段30は、ワークWの表面に対して前記所定方向からタッチセンサTSの先端部TSSを押し付け、タッチセンサTSを移動させた方向及び速度と、ワークWの表面の形状に応じて出力されるタッチセンサTSからの信号とに基づいて、ワークWの表面の形状を連続的に測定した測定形状データを作成する。
(もっと読む)
1 - 11 / 11
[ Back to top ]