
Fターム[2F103ED18]の内容
Fターム[2F103ED18]に分類される特許
1 - 20 / 65
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
信号処理装置及び計測装置

【課題】安価で信頼性の高い信号処理装置を提供する。
【解決手段】被計測物の変位に応じた複数の周期信号に基づいて、前記変位に係る波数および位相の組み合わせを得る信号処理装置であって、前記複数の周期信号のサンプリング毎に該複数の周期信号から位相を得る第1手段と、サンプリング毎に前記第1手段により得られた位相に基づく波数および位相の組み合わせに対して回帰演算を行うことにより、サンプリング間隔における前記位相の変化量を得る第2手段と、第1サンプリングでの前記組み合わせに前記変化量を加算して第2サンプリングでの前記組み合わせを予測する第3手段と、前記第1手段により得られた前記第2サンプリングでの位相から、前記第3手段により予測された前記組み合わせの予測誤差を得る第4手段と、前記第3手段により予測された前記組み合わせに前記予測誤差を加算して前記第2サンプリングでの前記組み合わせを得る第5手段とを有する。
(もっと読む)
エンコーダ、駆動システム、及び制御装置
【課題】基準位置を高精度に検出する。
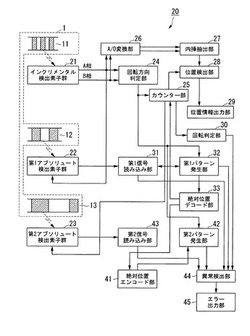
【解決手段】エンコーダは、位置情報パターンと基準位置を示す基準位置パターンとを有するスケールと、位置情報パターンを検出した位置情報信号を出力する位置情報検出部と、基準位置パターンを検出して、第1信号と第2信号とを出力する基準位置検出部と、第1信号と第2信号とに基づいて、基準位置の近傍位置を示す基準位置近傍信号、及び、基準位置を示す基準信号を生成する信号生成部と、を備える。
(もっと読む)
光学式位置測定装置
【課題】相対移動可能な2つの物体の位置を測定する光学式位置測定装置において、基準信号を適切に発生させる。
【解決手段】一方の物体と結合された目盛本体が、基準位置に、鏡像対称に配置された2つの部分区域を含む基準マークを含み、該区域はそれぞれ、目盛周期が変化し移動方向に配列する格子構造パターンで構成されている。他方の物体には走査ユニットが結合され、該ユニットは光源と、1又は複数の格子と、基準信号検出装置と備えている。基準信号検出装置は、検出器アレイ22.1〜22.4を有し、基準マークを走査して検出器アレイで検出して、第1の対の逆相関係にある部分基準信号、該部分基準信号からオフセットされている第2の対の逆相関係にある部分基準信号を形成する。検出器アレイに接続された後段の処理回路において、第1及び第2の対の部分基準信号を処理して、基準信号を生成する。
(もっと読む)
光学式エンコーダおよび電子機器
【課題】1系統の信号線で移動情報信号を出力可能にでき、かつ高精度な相対位置情報と移動方向を検出できてモジュールの小型化に最適な光学式エンコーダを提供する。
【解決手段】この光学式エンコーダは、移動体1が移動方向の寸法が基準寸法Wの光オン部6と基準寸法Wの2倍の光オフ部7とが交互に形成されている。受光部2の第1受光素子51,61,71の第1受光信号S1と第2受光素子52,62,72の第2受光信号S2から第1論理積回路111により第1移動情報信号Aが生成される。第3受光素子53,63,73の第3受光信号S3と第4受光素子54,64,74の第4受光信号S4から第2論理積回路112により第2移動情報信号Bが生成される。第5受光素子55,65,75の第5受光信号S5と第6受光素子56,66,76の第6受光信号S6から第3論理積回路113により第3移動情報信号Cが生成される。
(もっと読む)
光学式エンコーダ
【課題】検出波形の誤差成分を低減し、高精度な位置検出を可能とする。
【解決手段】スケールの透過率分布または反射率分布を、測位方向に垂直な方向の積分値が測位方向に均一な変調振幅となる細周期パターンに対応した変調成分と、測位方向に均一な変調振幅となる粗周期パターンに対応した変調成分と、の加算された値となる分布とする。
(もっと読む)
エンコーダ、及びアクチュエータ
【課題】エンコーダの低コスト化を図りつつ、エンコーダの信頼性を向上する。
【解決手段】エンコーダ27は、起動時等にスライダが停止した状態で、独立して点灯される複数の光源を用いて複数の絶対位置を検出し、この複数の絶対位置の差が所定範囲内に収まっているかどうかに基づいてエラーの判定を行うことで、高い信頼性を確保する。これとともに、エンコーダ27は、起動後は、インクリメンタルスケール51を用いインクリメンタルエンコーダとして用いられることで、低コスト、及びコンパクトな構成とすることができる。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
エンコーダを用いた位置検出装置及び位置検出方法
【課題】確実な原点検出と高精度な相対位置検出の両立が可能なエンコーダを用いる位置検出装置及び方法を提供することである。
【解決手段】位置検出装置は、エンコーダ101と補正手段103と相対位置検出手段105と原点検出手段104と絶対位置決定手段106を備える。エンコーダは、スケール13と受信部12を有し、スケールは、不連続部分を持つ周期的パターンを有し、受信部は、相対移動時に、周期的パターンからの信号を受信して位置検出用の信号を生成する。補正手段は、受信部の出力信号の不連続部分に由来する部分を補正する。相対位置検出手段は、補正信号に対してエンコード処理を施し相対位置を検出する。原点検出手段は、不連続部分に由来する信号部分を含む受信部の出力信号に基づいて原点位置を検出する。絶対位置決定手段は、相対位置の検出結果と原点位置の検出結果から絶対位置を決定する。
(もっと読む)
光電式エンコーダ
【課題】検出器を複雑化することなく、原点マークでの光の回折による原点の誤検出を回避して正確な原点検出を可能とする。
【解決手段】測長方向で点光源24に対して対称に配置される原点信号受光部32z、32zbと、原点マーク14の位置に対応する原点検出信号を発生させることで原点信号を出力する原点信号処理部60を有する信号処理部40と、を備え、原点信号処理部60は、原点マーク14で反射されることにより生じるサイドローブ光により原点信号受光部32z、32zbから出力される信号レベルの最大値を規定値Vtとして設け、原点信号受光部32zの出力が規定値Vtよりも大きな信号レベルとなる最初の位置から、原点信号受光部32zbの出力が規定値Vtを超えてから規定値Vtよりも小さな信号レベルとなる最初の位置の間に、原点検出の有効領域を設け、有効領域内で原点検出信号を発生させる。
(もっと読む)
高解像度の光学エンコーダ・システム、装置及び方法
【課題】対ノイズ性が改良され、高い補間係数を提供することができ、高精度の補間出力信号を生じることができ、かつ回路の複雑性、設計及び/又は費用を過度に増加させることがないモーション・コード化システムに対する補間回路を提供する。
【解決手段】光学エンコーダ10に関連して使用するための、フロント・エンドのアナログ回路110の種々の実施形態が開示される。回路を補間するために増分又は絶対モーション・エンコーダの中のフロント・エンドのアナログ回路110によって、高精度のアナログ出力信号が提供される。これにより、高いタイミング精度を有する高い補間係数の出力信号を提供することができる。開示された補間回路は、必要以上に努力することなくCMOS又はBiCMOS工程を用いて実現することができる。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において等間隔に設けられた光透過部又は反射板で構成される光学要素312と、前記光学要素に光を照射する発光部320と、前記光学要素を透過する、または反射する光を受光して、その受光の大きさに応じた大きさのアナログ受光信号を出力する受光部370と、前記アナログ受光信号をあらかじめ定められた閾値を用いてからデジタル変換して一定間隔のパスル信号を発生するパルス発生部380と、を備え、前記光学要素は、前記光学要素の回転方向に沿って光透過率または光反射率が徐々に増減するように構成されている。
(もっと読む)
位置検出装置および液体吐出装置
【課題】リニアスケールの汚れを検出できる構成を備えた位置検出装置を提供すること。
【解決手段】キャリッジの位置を検出するリニアエンコーダは、発光部と、発光部からの光を受光する受光部と、発光部と受光部との間に配設されるリニアスケール31とを備えている。リニアスケール31は、キャリッジの位置を検出するために、発光部からの光を透過する第1透光部31fおよび発光部からの光を遮断する第1遮光部31eがキャリッジの検出範囲L内で交互に形成される位置検出パターン31bと、リニアスケール31の汚れを検出するために、発光部からの光を透過する第2透光部31hおよび発光部からの光を遮断する第2遮光部31gが交互に形成される汚れ検出パターン31cとを備えている。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
エンコーダー及び電気機械装置。
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、回転円盤上において等間隔に設けられたスリット又は反射板で構成される光学要素列311〜314と、光学要素列に光を照射する発光部321〜324と、光学要素列の個々の光学要素からの光を受光して矩形状の受光信号を出力する受光部371〜374とを備え、光学要素列は、回転円盤の中心からの距離が互いに異なるn個(nは2以上の整数)の円周に沿ってn列配置されており、n組の光学要素列は、等しい個数のm個(mは2以上の整数)の光学要素を含んでおり、発光部と受光部は、n組の光学要素列に対応してn組配置され、個々の受光信号の1周期の位相差を2πと定義したとき、n組の光学要素列とn組の発光部及び受光部とは、n組の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
デコーダ装置および移動制御装置
【課題】1系統出力信号線から出力された出力波形の信号を位相のずれやノイズパルスが抑制された複数のデジタル出力信号に変換する高精度なデコーダ装置を提供する。
【解決手段】このデコーダ装置は、基準電圧発生部10が発生する第1のスレッシュレベル信号によるスレッシュレベル(1)と第2のスレッシュレベル信号によるスレッシュレベル(2)‐1とは、各スレッシュレベル(1),(2)‐1に対応した段状波形S13,S12の段差部P13,P12と交差する範囲で各段状波形S13,S12の段差部の中心レベルに比べて互いに近づいている。よって、各段状波形の段差部のスルーレートに起因して生じる各スレッシュレベル(1),(2)‐1と各段状波形の段差部との交点の位相のずれの縮小を図れるので、比較器1,2による第1,第2の比較出力信号(A),(B)が上記スルーレートに起因して位相がずれることを抑制できる。
(もっと読む)
原点検出装置
【課題】 より簡単な演算によって、複数の信号の位相差が所定の値となる位置の中から原点を特定し、より高速にかつ高精度に原点を検出する。
【解決手段】 光源と、光源に対して相対的に移動可能であり、互いに格子ピッチの異なる第1及び第2の回折格子部を有するスケールと、光源から射出され、第1及び第2の回折格子部においてそれぞれ異なる次数で回折した複数の回折光によって生じる第1及び第2の干渉光を受光し、第1及び第2の周期信号を出力する受光部と、第1及び第2の周期信号に基づいてスケールの変位の原点を示す原点信号を出力する演算部と、を有する原点検出装置において、第2の周期信号はスケールが原点に位置する場合に極値をとるように設定されており、演算部は第1及び第2の周期信号の位相差が所定の値となり、かつ第2の周期信号の値が極値となる場合に原点信号を出力する。
(もっと読む)
信号処理装置及び計測装置
【課題】
安価で信頼性の高い信号処理装置を提供する。
【解決手段】
本発明の信号処理装置は、被計測物の位置を計測する計測装置に用いられる信号処理装置1であって、被計測物の位置に応じた信号の位相を時間に対して回帰することにより、被計測物の速度を算出する回帰演算器19と、第1のサンプリング時における被計測物の位置に回帰演算器19で算出された速度を加算することにより、第2のサンプリング時における被計測物の予測位置を求める予測演算手段(加算器22)と、位相演算手段で求められた第2のサンプリング時の計測位相から予測位置を減算して予測誤差を求める誤差演算手段(減算器23)と、桁拡張した予測誤差を予測位置に加算することにより、第2のサンプリング時における被計測物の位置を求める位置演算手段(加算器21)とを有する。
(もっと読む)
絶対角度符号部及び絶対位置測定装置
絶対角度符号部(1)は、一つのトラックで構成されている。そのトラックでは、第一の符号シーケンス(A)の一つの部分と第二の符号シーケンス(B)の一つの部分が交互に配置されている。これらの符号シーケンス(A,B)は、異なる長さを有し、二つの符号シーケンス(A,B)の長さは、有利には、1だけ異なる。角度符号部(1)の一回転内の絶対位置(POS)を一義的に検出するために、二つの符号シーケンス(A,B)の各々に対して、復号用の専用のテーブル(TA ,TB )を有する復号器(3)が配備されている。それらにより得られた二つの符号シーケンス(A,B)内の部分分割位置(xA ,xB )から、絶対位置(POS)を算出している。  (もっと読む)
(もっと読む)
光学式エンコーダおよび電子機器
【課題】検出信号を1系統の信号線で出力可能であり、かつ、高精度な相対位置情報と移動方向を検出でき、小型化に最適な光学式エンコーダを提供する。
【解決手段】この光学式エンコーダは、受光部2の受光素子11〜14が出力する受光信号A+,B−,A−,B+から、差動増幅器21,22、AD変換器23,24でもってA相のデジタル信号A,/AとB相のデジタル信号Bを得る。そして、このA相,B相のデジタル信号から論理和回路25,26とgm増幅器27,28および負帰還回路35により、図2に示す階段波形の出力信号S8を得る。この出力信号S8は、V0〜2V0の電圧範囲(2)では、A相出力であるデジタル信号Aと同一波形であり、2V0〜3V0の電圧範囲(1)での波形成分を反転して、0〜V0の電圧範囲(3)での波形成分と論理合成することでB相出力であるデジタル信号Bを生成できる。
(もっと読む)
1 - 20 / 65
[ Back to top ]